一种稳定式无人自动化起重机的制作方法
- 国知局
- 2024-10-09 15:29:45
本发明涉及起重机,具体是一种稳定式无人自动化起重机。
背景技术:
1、起重机是指在一定范围内垂直提升和水平搬运重物的多动作起重机械,起重设备有的工作特点是做间歇性运动,即在一个工作循环中取料、运移、卸载等动作的相应机构是交替工作的,起重机在市场上的发展和使用越来越广泛。由于不用支腿吊重及吊重行驶经常出现一些事故,行驶的速度也较履带起重机(履带吊)快;作业稳定、起重量大、可在特定范围内吊重行走、但必须保证道路平整坚实、轮胎气压符合要求、吊离地面不得超过50cm;禁止带负荷长距离行走。为保证作业安全,国内基本上禁止不打支腿进行吊装作业。起重机配套使用钢丝绳品种包括磷化涂层钢丝绳、镀锌钢丝绳和光面钢丝绳。
2、随着无人设备技术的发展,无人起重机也投入使用,而在现有技术中,多数无人起重机均采用单线进行吊装,在进行管材吊装时,容易因中心不稳导致吊装的管材向一侧倾倒,从而导致吊装管材掉落,造成财产损失的同时,也存在巨大的安全隐患。
技术实现思路
1、本发明的目的在于提供一种稳定式无人自动化起重机,通过两组设置的驱动设备配合两组吊装钢缆进行吊装作业,在进行吊装作业的同时,通过两个平行设置的吊钩进行吊装作业,可有效确保吊装作业时,下方吊装的物料平衡,从而确保吊装作业的安全性和稳定性,提高无人吊装设备的安全性,同时,配合无线通信设备实现无人控制,提高设备智能化,以解决上述背景技术中提出的在现有技术中,多数无人起重机均采用单线进行吊装,在进行管材吊装时,容易因中心不稳导致吊装的管材向一侧倾倒,从而导致吊装管材掉落,造成财产损失的同时,也存在巨大的安全隐患问题。
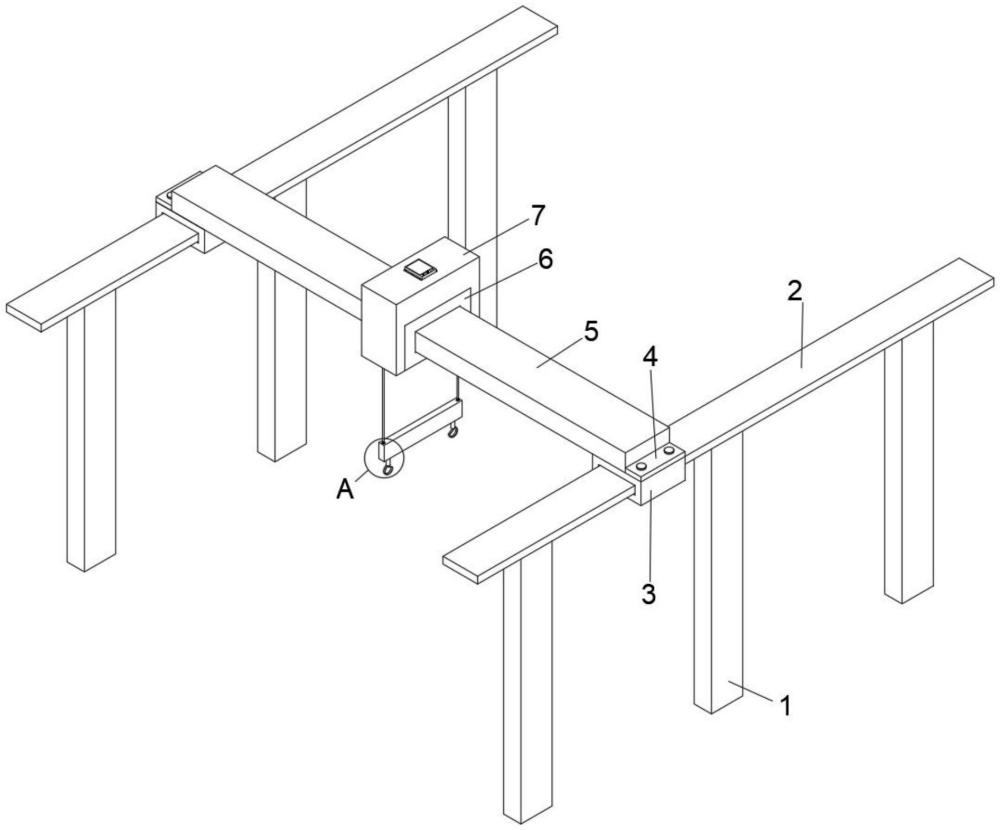
2、为实现上述目的,本发明提供如下技术方案:一种稳定式无人自动化起重机,包括两个横向导轨,两个所述横向导轨呈平行设置,两个所述横向导轨的底部共同固定连接有多个支撑柱,两个所述横向导轨上均活动连接有横向线性电机,两个所述横向线性电机的顶部共同设置有纵向导轨,所述纵向导轨上活动连接有纵向线性电机,所述纵向线性电机的顶部固定连接有工作盒,所述工作盒的内部呈中空设置,所述工作盒的内部固定有两个驱动电机,所述工作盒靠近驱动电机两侧的内壁均设置有缠绕轴,两个所述缠绕轴的外壁均缠绕有吊装钢缆,两个所述吊装钢缆的分别远离缠绕轴的一端均与工作盒贯穿活动连接,两个所述吊装钢缆的底部共同固定连接有吊装座,所述吊装座两侧的底部均设置有吊装挂钩,所述工作盒的顶部设置有控制盒。
3、作为本发明进一步的方案:两个所述驱动电机的底部均固定连接有固定座,两个所述驱动电机的输出端均固定连接有主动轴,两个所述主动轴的外壁均固定连接有主动链轮,两个所述缠绕轴的两端均固定连接有限位板,两个所述限位板的外壁均固定连接有从动轴。
4、作为本发明再进一步的方案:多个所述从动轴与主动链轮位置相匹配的外壁均固定连接有从动链轮,多个所述主动链轮和从动链轮相匹配的外壁均啮合连接有传动链。
5、作为本发明再进一步的方案:多个所述主动轴和从动轴的两端外壁均固定连接有活动轴承,多个所述活动轴承均通过轴承座与工作盒的内壁转动连接。
6、作为本发明再进一步的方案:所述工作盒两侧的底端侧壁均设置有多个辅助滑轮,多个所述辅助滑轮均设置于吊装钢缆的两侧,多个所述辅助滑轮的中心点均贯穿固定连接有连接转轴,多个所述连接转轴的两端侧壁均固定连接有连接轴承,多个所述连接轴承均通过轴承座与吊装座的内壁转动连接。
7、作为本发明再进一步的方案:两个所述吊装挂钩的顶部均固定连接有连接轴,两个所述连接轴的顶部均通过法兰与吊装座的底部可拆卸连接,两个所述吊装挂钩的开口处均活动连接有活动限位块。
8、作为本发明再进一步的方案:所述工作盒的顶部设置有控制盒,所述控制盒的内部开设有安装腔,所述安装腔的内部固定连接有控制面板,所述控制面板的顶部固定连接有无线通讯芯片,所述控制面板靠近无线通讯芯片一端的顶部固定连接有信号存储芯片,所述控制面板的顶部固定连接有感应芯片,所述控制面板的顶部固定连接有控制芯片。
9、作为本发明再进一步的方案:所述纵向导轨两侧的顶部均固定连接有固定块,两个所述固定块的顶部均贯穿螺纹连接有固定螺栓,两个所述固定块均通过螺栓与横向线性电机的顶部可拆卸连接。
10、与现有技术相比,本发明的有益效果是:本发明中,通过两组设置的驱动设备配合两组吊装钢缆进行吊装作业,在进行吊装作业的同时,通过两个平行设置的吊钩进行吊装作业,可有效确保吊装作业时,下方吊装的物料平衡,从而确保吊装作业的安全性和稳定性,提高无人吊装设备的安全性,同时,配合无线通信设备实现无人控制,提高是设备智能化。
技术特征:1.一种稳定式无人自动化起重机,包括两个横向导轨(2),两个所述横向导轨(2)呈平行设置,其特征在于:两个所述横向导轨(2)的底部共同固定连接有多个支撑柱(1),两个所述横向导轨(2)上均活动连接有横向线性电机(3),两个所述横向线性电机(3)的顶部共同设置有纵向导轨(5),所述纵向导轨(5)上活动连接有纵向线性电机(6),所述纵向线性电机(6)的顶部固定连接有工作盒(7),所述工作盒(7)的内部呈中空设置,所述工作盒(7)的内部固定有两个驱动电机(14),所述工作盒(7)靠近驱动电机(14)两侧的内壁均设置有缠绕轴(21),两个所述缠绕轴(21)的外壁均缠绕有吊装钢缆(8),两个所述吊装钢缆(8)的分别远离缠绕轴(21)的一端均与工作盒(7)贯穿活动连接,两个所述吊装钢缆(8)的底部共同固定连接有吊装座(9),所述吊装座(9)两侧的底部均设置有吊装挂钩(11),所述工作盒(7)的顶部设置有控制盒(13)。
2.根据权利要求1所述的一种稳定式无人自动化起重机,其特征在于:两个所述驱动电机(14)的底部均固定连接有固定座(19),两个所述驱动电机(14)的输出端均固定连接有主动轴(16),两个所述主动轴(16)的外壁均固定连接有主动链轮(18),两个所述缠绕轴(21)的两端均固定连接有限位板(15),两个所述限位板(15)的外壁均固定连接有从动轴(23)。
3.根据权利要求2所述的一种稳定式无人自动化起重机,其特征在于:多个所述从动轴(23)与主动链轮(18)位置相匹配的外壁均固定连接有从动链轮(22),多个所述主动链轮(18)和从动链轮(22)相匹配的外壁均啮合连接有传动链(20)。
4.根据权利要求2所述的一种稳定式无人自动化起重机,其特征在于:多个所述主动轴(16)和从动轴(23)的两端外壁均固定连接有活动轴承(17),多个所述活动轴承(17)均通过轴承座与工作盒(7)的内壁转动连接。
5.根据权利要求1所述的一种稳定式无人自动化起重机,其特征在于:所述工作盒(7)两侧的底端侧壁均设置有多个辅助滑轮(24),多个所述辅助滑轮(24)均设置于吊装钢缆(8)的两侧,多个所述辅助滑轮(24)的中心点均贯穿固定连接有连接转轴(25),多个所述连接转轴(25)的两端侧壁均固定连接有连接轴承(26),多个所述连接轴承(26)均通过轴承座与吊装座(9)的内壁转动连接。
6.根据权利要求1所述的一种稳定式无人自动化起重机,其特征在于:两个所述吊装挂钩(11)的顶部均固定连接有连接轴(10),两个所述连接轴(10)的顶部均通过法兰与吊装座(9)的底部可拆卸连接,两个所述吊装挂钩(11)的开口处均活动连接有活动限位块(12)。
7.根据权利要求1所述的一种稳定式无人自动化起重机,其特征在于:所述控制盒(13)的内部开设有安装腔(27),所述安装腔(27)的内部固定连接有控制面板(28),所述控制面板(28)的顶部固定连接有无线通讯芯片(29),所述控制面板(28)靠近无线通讯芯片(29)一端的顶部固定连接有信号存储芯片(30),所述控制面板(28)的顶部固定连接有感应芯片(31),所述控制面板(28)的顶部固定连接有控制芯片(32)。
8.根据权利要求1所述的一种稳定式无人自动化起重机,其特征在于:所述纵向导轨(5)两侧的顶部均固定连接有固定块(4),两个所述固定块(4)的顶部均贯穿螺纹连接有固定螺栓,两个所述固定块(4)均通过螺栓与横向线性电机(3)的顶部可拆卸连接。
技术总结本发明公开了起重机技术领域的一种稳定式无人自动化起重机,包括两个横向导轨,两个所述横向导轨呈平行设置,两个所述横向导轨的底部共同固定连接有多个支撑柱,两个所述横向导轨上均活动连接有横向线性电机,两个所述横向线性电机的顶部共同设置有纵向导轨,所述纵向导轨上活动连接有纵向线性电机。通过两组设置的驱动设备配合两组吊装钢缆进行吊装作业,在进行吊装作业的同时,通过两个平行设置的吊钩进行吊装作业,可有效确保吊装作业时,下方吊装的物料平衡,从而确保吊装作业的安全性和稳定性,提高无人吊装设备的安全性,同时,配合无线通信设备实现无人控制,提高设备智能化。技术研发人员:李小伟,王鹏受保护的技术使用者:菲尔森智能装备(江苏)有限公司技术研发日:技术公布日:2024/9/29本文地址:https://www.jishuxx.com/zhuanli/20241009/308934.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表