海拔限定条件下基于空间目标光学测角的天文导航方法
- 国知局
- 2024-10-15 09:30:08
本发明涉及导航定位领域中的天文导航方法,特别是一种海拔限定条件下基于空间目标光学测角的天文导航方法。
背景技术:
1、高精度导航定位信息是航天器、飞机、导弹以及舰船等平台执行各项任务的基础。卫星导航是目前实现高精度导航最高效的手段,然而在复杂电磁环境下,卫星导航系统存在被干扰或欺骗的可能。如何在卫星拒止条件下,为运动载体提供完全自主、高精度的定位信息是导航领域亟待解决的关键技术难题。
2、天文导航通过观测恒星、太阳等天体的方向信息,结合水平基准信息完成定位解算,理论上误差不随时间发散,在飞机、舰船、导弹等各种平台上成功应用,已成为卫星拒止条件下的导航保底手段。然而,传统天文导航以恒星为导航信标,为实现定位解算必须利用惯性导航系统提供的水平姿态参考信息将恒星的方向矢量转化高度角信息进行定位解算,由于惯性导航初始误差、惯性器件误差以及轴系误差,将导致其水平姿态误差引入到定位结果中,且在无其他外部信息辅助时该误差抑制较为困难。
3、为克服天文导航对惯性导航水平姿态信息的依赖,现有技术提出了一种仅测角导航(angles-only navigation)方法,通过对3颗以上的卫星进行光学观测实现定位解算,可显著提高天文导航的定位精度。由于该方法需要同时观测多颗卫星,或者在对同一颗卫星进行多次观测,然而在舰船平台上进行观测时容易受云雾干扰,卫星的可见性较差,因此导航信息的可用性、实时性较低,限制了该方法在低海拔区域的应用。
4、如何降低对天文目标观测的要求,简化测量步骤,提高数据的可用性进而提升定位精度,是本领域技术人员关注的技术问题。
技术实现思路
1、本发明所要解决的技术问题是,针对现有技术不足,采用以卫星、空间站、空间碎片或者火箭残骸等轨道确定的空间目标作为导航信标,提供一种海拔限定条件下基于空间目标光学测角的天文导航方法,提高导航定位精度和数据可用性。
2、为解决上述技术问题,本发明所采用的技术方案是:一种海拔限定条件下基于空间目标光学测角的天文导航方法,包括以下步骤:
3、s1、计算空间目标坐标,筛选满足观测俯仰角阈值的空间目标;
4、s2、预测经步骤s1筛选的空间目标星等,根据星等选择导航空间目标,若存在满足条件的导航空间目标,则进入步骤s3;否则,返回步骤s1;
5、s3、将光学成像系统光轴调整为指向导航空间目标,触发相机曝光成像;
6、s4、从拍摄的星图中分别提取导航空间目标和视场中的全部恒星,利用恒星星点图像坐标信息解算光学成像系统的姿态;
7、s5、根据相机触发时刻重新计算导航空间目标的当前坐标,利用空间目标坐标和相机姿态完成定位解算,获取当地位置坐标。
8、本发明仅需通过一次空间目标测量即可实现导航解算,因此对观测条件的要求较低,可以有效简化测量步骤、提高测量的效率和数据的可用性。
9、步骤s2中,空间目标星等mcs_k的计算公式为:
10、
11、其中,α表示空间目标的几何反射率,rsat表示空间目标的半径,dss表示太阳和空间目标之间的距离,dps表示观测点和空间目标之间的距离,ρ⊙为太阳相位角,hsat为空间目标高度。
12、本发明根据星等选择导航空间目标的具体实现过程包括:筛选出空间目标星等低于探测阈值星等的所有空间目标,作为候选导航空间目标,选取候选导航空间目标中星等最低的空间目标作为导航空间目标。
13、步骤s2中,预测空间目标星等之前,还包括:判断空间目标是否被地影遮挡,若否,则进行空间目标星等预测,若是,则返回步骤s1;其中,当空间目标方向矢量与太阳方向矢量满足时,认为空间目标未被地影遮挡,r为地球平均半径,表示满足观测俯仰角阈值的空间目标集合中的第j个空间目标,表示照射到地球上的太阳光的入射方向的单位矢量。
14、步骤s4中,若无法成功提取导航空间目标,则返回步骤s3。
15、步骤s5中,观测点在地固坐标系e系下的坐标采用如下方法计算:
16、
17、其中,l为空间目标位置矢量的长度,r为平均地球半径,rn为地球赤道半径,为空间目标视线方向在地理坐标系下的方向矢量,f为相机焦距,(u0,v0)为相机主点的物理坐标,(us,vs)为空间目标在图像上的质心坐标,θ为空间目标位置矢量和视线方向之间的夹角,h为观测载体的海拔高度,为光学成像系统的姿态。
18、作为一个发明构思,本发明还提供了一种海拔限定条件下基于空间目标光学测角的天文导航系统,包括存储器、处理器及存储在存储器上的计算机程序;所述处理器执行所述计算机程序,以实现上述方法的步骤。
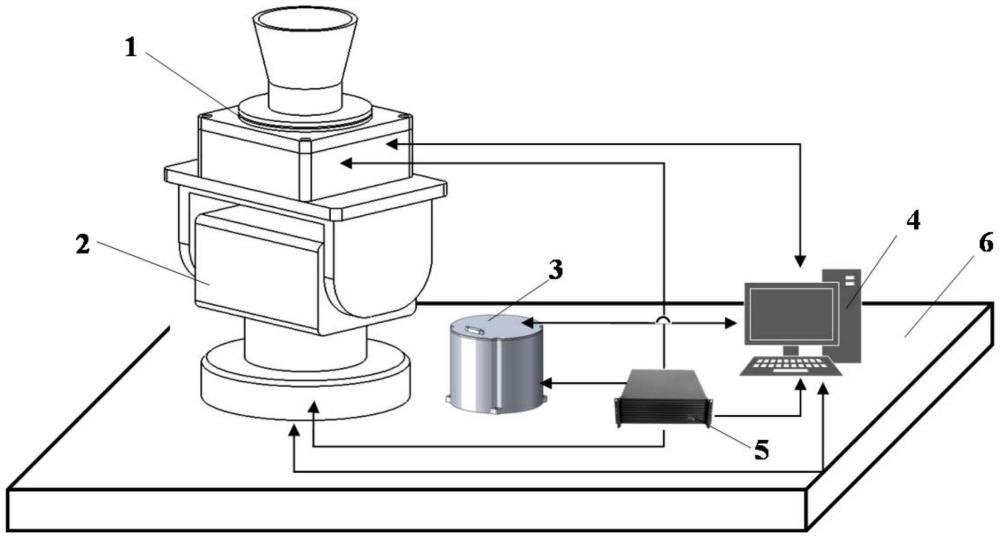
19、作为一个发明构思,本发明还提供了一种海拔限定条件下基于空间目标光学测角的天文导航系统,包括:
20、光学成像系统,用于对空间目标和恒星进行成像;
21、双轴转台,包括基座、方位旋转机构和俯仰旋转机构;所述俯仰旋转机构安装于方位旋转机构上,所述方位旋转机构安装于所述基座上;所述光学成像系统安装于所述俯仰旋转机构上;
22、惯性测量单元,用于提供基座的姿态信息;
23、时统设备,用于提供导航解算所需的utc时间信息以及各个测量控制设备数据采集的时间同步秒脉冲;
24、数据处理单元,与所述光学成像系统、双轴转台、惯性测量单元、时统设备通信,并采用上述方法的步骤实现天文导航解算;
25、所述双轴转台、惯性测量单元、时统设备和数据处理单元均安装于测量载体上。
26、本发明中,所述光学成像系统的视场角范围为5°~30°。
27、本发明中,所述双轴转台的方位旋转轴与俯仰旋转轴的垂直度误差应小于0.1°,当双轴转台的俯仰旋转轴和方位旋转轴均处于零位时,所述光学成像系统的光轴与双轴转台的方位旋转轴的平行度优于1°。
28、与现有技术相比,本发明所具有的有益效果为:本发明提供了一种不依赖于高精度水平参考信息的天文导航方案,仅需通过光学成像系统进行天文观测即可实现定位;本发明所需的双轴转台和和惯性测量单元仅用于提供光学成像系统光轴指向的粗略测量和控制,对设备的精度要求较低,有利于降低设备的硬件成本;本发明仅需通过一次空间目标测量即可实现导航解算,因此对观测条件的要求较低,可以有效简化测量步骤、提高测量的效率和数据的可用性。
技术特征:1.一种海拔限定条件下基于空间目标光学测角的天文导航方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的海拔限定条件下基于空间目标光学测角的天文导航方法,其特征在于,步骤s2中,空间目标星等mcs_k的计算公式为:
3.根据权利要求1或2所述的海拔限定条件下基于空间目标光学测角的天文导航方法,其特征在于,根据星等选择导航空间目标的具体实现过程包括:
4.根据权利要求1所述的海拔限定条件下基于空间目标光学测角的天文导航方法,其特征在于,步骤s2中,预测空间目标星等之前,还包括:判断空间目标是否被地影遮挡,若否,则进行空间目标星等预测,若是,则返回步骤s1;其中,当空间目标方向矢量与太阳方向矢量满足时,认为空间目标未被地影遮挡,r为地球平均半径,表示满足观测俯仰角阈值的空间目标集合中的第j个空间目标,表示照射到地球上的太阳光的入射方向的单位矢量。
5.根据权利要求1所述的海拔限定条件下基于空间目标光学测角的天文导航方法,其特征在于,步骤s4中,若无法成功提取导航空间目标,则返回步骤s3。
6.根据权利要求1所述的海拔限定条件下基于空间目标光学测角的天文导航方法,其特征在于,步骤s5中,观测点在地固坐标系e系下的坐标采用如下方法计算:
7.一种海拔限定条件下基于空间目标光学测角的天文导航系统,包括存储器、处理器及存储在存储器上的计算机程序;其特征在于,所述处理器执行所述计算机程序,以实现权利要求1~6之一所述方法的步骤。
8.一种海拔限定条件下基于空间目标光学测角的天文导航系统,其特征在于,包括:
9.根据权利要求8所述的系统,其特征在于,所述光学成像系统的视场角范围为5°~30°。
10.根据权利要求8所述的系统,其特征在于,双轴转台的方位旋转轴与俯仰旋转轴的垂直度误差小于0.1°,当双轴转台的俯仰旋转轴和方位旋转轴均处于零位时,所述光学成像系统的光轴与双轴转台的方位旋转轴的角度偏差不大于1°。
技术总结本发明公开了一种海拔限定条件下基于空间目标光学测角的天文导航方法,利用光学成像系统同时观测卫星和恒星,通过恒星观测信息进行姿态解算,利用海拔高度的约束条件,结合卫星的方向矢量信息完成定位解算。该方法通过单次对一颗卫星的光学观测和方向测量,显著减少了对多次观测或多星观测的依赖,简化了测量步骤,提高了效率和数据可用性,同时降低了对设备精度的要求,有利于降低成本。本发明适用于船载应用条件,可为复杂电磁环境下的动态平台提供一种可靠、经济、高效的导航定位解决方案。技术研发人员:戴东凯,倪源蔓,郑佳兴,谭文锋,秦石乔受保护的技术使用者:中国人民解放军国防科技大学技术研发日:技术公布日:2024/10/10本文地址:https://www.jishuxx.com/zhuanli/20241015/314346.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表