一种基于多站雷达融合信号的船舶轨迹优化方法与流程
- 国知局
- 2024-10-15 09:45:05
本发明涉及船舶轨迹优化,具体涉及一种基于多站雷达融合信号的船舶轨迹优化方法。
背景技术:
1、基于多站雷达融合信号的船舶轨迹优化是一种利用多个雷达站点收集到的船舶信号数据,通过融合这些数据进行分析和处理,以优化船舶的运行轨迹。首先,多个雷达站点收集到的数据可以提供更全面和准确的船舶位置和运动信息,通过融合这些数据可以消除单一雷达站点可能存在的局限性和误差,从而更精确地确定船舶的位置和轨迹。其次,通过对融合后的数据进行分析和处理,可以实现对船舶轨迹的优化,包括路径规划、航行安全性评估等,以提高船舶的航行效率和安全性。
2、现有技术存在以下不足:
3、对收集到的数据进行融合前,现有技术无法将数据采集频率不一致站点信息筛除,若将数据采集频率不一致的数据进行融合,可能导致融合后的数据在时间和空间上出现错位,进而导致船舶位置和轨迹的准确性受到严重影响,由于不同站点的数据采集频率不同,可能导致某些数据在时间上相对滞后或超前,从而在融合过程中无法准确地对齐,进而使得融合后的数据无法反映真实的船舶位置和轨迹信息,这种位置偏移和轨迹重叠不准确可能会对船舶的航行安全性造成严重威胁,导致船舶与其他船只或障碍物相撞的风险大大增加,甚至可能引发重大事故;
4、对收集到的数据进行融合时,如果在融合过程中某些时刻的数据丢失,则可能导致船舶轨迹出现间断或不连续的情况,使得船舶位置信息在融合后的轨迹中出现断层,难以准确反映船舶的实际运动路径,同样可能会对船舶的航行安全性造成严重威胁。
5、在所述背景技术部分公开的上述信息仅用于加强对本公开的背景的理解,因此它可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现思路
1、本发明的目的是提供一种基于多站雷达融合信号的船舶轨迹优化方法,通过比较不同雷达站点的数据采集频率,使系统能够识别出频率不一致的数据,并将其进行筛除,这一过程涉及到对数据的时间戳进行精准匹配,以确保各站点数据在融合时能够准确对齐,可有效地防止了因数据采集频率不同而导致的时间和空间上的错位,从而保证了融合后数据的时空一致性,为后续轨迹优化提供了可靠的基础,以解决上述背景技术中的问题。
2、为了实现上述目的,本发明提供如下技术方案:一种基于多站雷达融合信号的船舶轨迹优化方法,包括以下步骤:
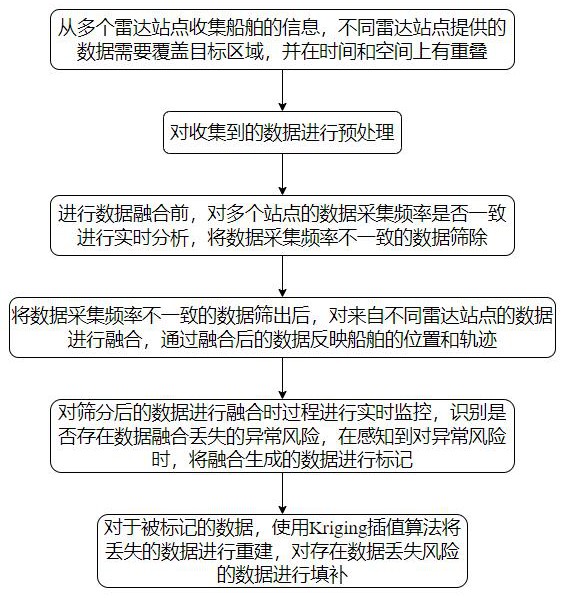
3、从多个雷达站点收集船舶的信息,不同雷达站点提供的数据需要覆盖目标区域,并在时间和空间上有重叠;
4、对收集到的数据进行预处理;
5、进行数据融合前,对多个站点的数据采集频率是否一致进行实时分析,将数据采集频率不一致的数据筛除;
6、将数据采集频率不一致的数据筛出后,对来自不同雷达站点的数据进行融合,通过融合后的数据反映船舶的位置和轨迹;
7、对筛分后的数据进行融合时过程进行实时监控,识别是否存在数据融合丢失的异常风险,在感知到对异常风险时,将融合生成的数据进行标记;
8、对于被标记的数据,使用kriging插值算法将丢失的数据进行重建,对存在数据丢失风险的数据进行填补。
9、优选的,对多个站点的数据采集频率是否一致进行实时分析,将数据采集频率不一致的数据筛除的步骤如下:
10、对于每个雷达站点采集的数据,计算相邻数据点之间的时间间隔,然后,根据时间戳的差异,计算出每个站点相对于参考站点的时间偏移量;
11、从多个雷达站点中选择一个作为参考站点;
12、使用时间对齐算法,根据计算得到的时间偏移量,将其他站点的数据时间上对齐到参考站点的时间轴上;
13、在时间对齐后,根据数据的时间戳和对齐后的时间轴,将时间间隔不一致的数据点标记为异常数据点,再将被标记的数据点进行筛除。
14、优选的,使用时间对齐算法,根据计算得到的时间偏移量,将其他站点的数据时间上对齐到参考站点的时间轴上的具体步骤为:
15、步骤一、建立最小二乘方程,将时间偏移量作为自变量,使得方程中的残差平方和最小化;
16、步骤二、使用最小二乘法的求解方法,求解出使得残差最小的时间偏移量;
17、步骤三、将求解得到的时间偏移量应用到其他站点的数据上,对于每个站点的数据,将每个时间戳根据对应的时间偏移量进行调整,使得数据时间上对齐到参考站点的时间轴上。
18、优选的,获取筛分后的数据进行融合时的数据精度损失率信息和时钟漂移信息,数据精度损失率信息表示在数据融合过程中数据精度损失所占比例,时钟漂移信息表示不同雷达站点的时钟与参考时钟之间的偏差程度,获取后,对数据精度损失率信息和时钟漂移信息进行异常分析后,生成数据精度损失率异常增量量化值和时钟漂移量化值。
19、优选的,数据精度损失率异常增量量化值获取的逻辑如下:
20、收集来自多个站点的历史数据,包括数据精度损失率随时间的变化情况;
21、对数据精度损失率随时间的变化进行趋势拟合,设拟合函数为,拟合函数的表达形式为:,其中 n是多项式的阶数,是拟合函数的系数, t代表时间, i是幂次;
22、计算每个时间点的残差,即实际数据精度损失率与拟合函数之间的差异,残差用表示,计算公式为:,其中,为时间 t处对应的实际数据精度损失率;
23、将计算得出的残差与预先设定的残差参考阈值进行比对分析,通过超过残差参考阈值的残差计算数据精度损失率异常增量量化值,计算的表达式为:
24、,其中, n为时间序列的长度,表示观测数据的时间点数目,为时间 t处残差的权重。
25、优选的,时钟漂移量化值获取的逻辑如下:
26、获取从不同雷达站点收集到的信号数据,对于每对雷达站点 k和 j,计算两个站点接收到的信号的相位差,设相位差为,表示 t时刻站点 k和站点 j的相位差;
27、对相位差进行相干积分,将相位差积分到一个时间窗口内,设积分后的相位差为,表示时间窗口内的相位差,则相位差进行相干积分的表达式为:
28、,其中, w为时间窗口的宽度,表示积分的时间跨度;
29、利用相位积分得到的相位差,计算两个雷达站点之间的时钟漂移,设站点 k和站点 j之间的时钟漂移为,则站点 k和站点 j之间的时钟漂移的计算表达式为:
30、,其中,是雷达信号的中心频率;
31、对所有站点之间的时钟漂移进行加权求和,计算时钟漂移量化值,设时钟漂移量化值为,则时钟漂移量化值的计算表达式为:
32、,其中,是对应站点之间的权重。
33、优选的,获取到筛分后的数据进行融合时生成的数据精度损失率异常增量量化值和时钟漂移量化值后,建立数据分析模型,生成融合丢失隐患评估系数,通过融合丢失隐患评估系数对数据融合时的异常风险进行智能化感知。
34、优选的,将筛分后的数据进行融合时生成的融合丢失隐患评估系数与预先设定的融合丢失隐患评估系数参考阈值进行比对分析,若融合丢失隐患评估系数大于等于融合丢失隐患评估系数参考阈值,则将对应时刻融合生成的数据进行标记,若融合丢失隐患评估系数小于融合丢失隐患评估系数参考阈值,则不将对应时刻融合生成的数据进行标记。
35、优选的,对于被标记的数据,将存在数据丢失风险的数据进行填补的具体步骤如下:
36、步骤一、确定需要进行插值的区域范围,并对kriging插值算法所需的参数进行设定;
37、步骤二、使用设定好的参数执行kriging插值算法,对标记的数据点进行插值处理;
38、步骤三、对插值后的数据进行评估,检查插值结果是否合理;
39、步骤四、将经过kriging插值处理后的数据填补到原始数据中,替换掉标记的数据。
40、在上述技术方案中,本发明提供的技术效果和优点:
41、本发明通过比较不同雷达站点的数据采集频率,使系统能够识别出频率不一致的数据,并将其进行筛除,这一过程涉及到对数据的时间戳进行精准匹配,以确保各站点数据在融合时能够准确对齐,可有效地防止了因数据采集频率不同而导致的时间和空间上的错位,从而保证了融合后数据的时空一致性,为后续轨迹优化提供了可靠的基础。
42、本发明通过持续监测数据融合过程中是否存在数据丢失的异常情况,一旦发现异常,系统将立即对其进行标记并记录,这种实时监控机制使得系统能够及时发现并响应数据丢失的情况,进而采取插值补全的补救措施,以确保轨迹数据的完整性和连续性,这种智能化的监控与响应机制有效地提高了数据融合过程的可靠性和稳定性,为船舶轨迹优化提供了可靠的数据支撑。
本文地址:https://www.jishuxx.com/zhuanli/20241015/315196.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表