一种水下地形及目标物的立体成像方法及系统与流程
- 国知局
- 2024-10-15 09:49:43
本发明属于海底目标探测,更具体地,涉及一种水下地形及目标物的立体成像方法及系统。
背景技术:
1、以下是水下探测技术的一些现状和趋势:
2、1.声学探测
3、多波束测深系统(mbes):广泛用于海底地形测绘,能够生成高分辨率的海底地形图。mbes利用多个声束同时探测不同角度的海底,提供详细的地形数据。
4、侧扫声呐(sss):主要用于大面积的海底覆盖探测,能够识别海底的障碍物和人造结构。它利用声波在海底反射形成图像,常用于沉船搜索和水下考古。
5、水下声波通信:用于传输数据和进行远程控制。由于水下电磁波传播效果差,声波成为主要的通信手段,广泛应用于水下机器人和传感器网络。
6、2.光学探测
7、水下激光扫描:在清澈水域中,通过激光扫描技术可以实现高精度的海底地形和物体成像。激光扫描仪能够在水下环境中捕获精细的三维结构数据。
8、水下摄影:用于高分辨率的图像捕捉,常用于生物监测和海底工程检查。水下摄影技术依赖于高性能的摄像机和照明系统来克服光线衰减的问题。
9、但是现有技术中并没有一种技术方案能够准确的对水下地形及目标物进行立体成像。
技术实现思路
1、为解决以上技术问题,本发明提出一种水下地形及目标物的立体成像方法,包括:
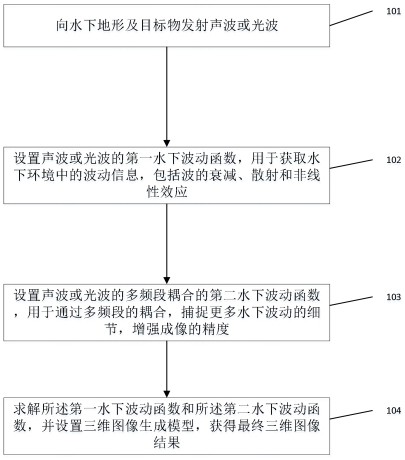
2、步骤101,向水下地形及目标物发射声波或光波;
3、步骤102,设置声波或光波的第一水下波动模型,用于获取水下环境中的波动信息,包括波的衰减、散射和非线性效应;
4、步骤103,设置声波或光波的多频段耦合的第二水下波动模型,用于通过多频段的耦合,捕捉水下波动的细节,增强成像的精度;
5、步骤104,求解所述第一水下波动模型和所述第二水下波动模型,生成第一波动函数和第二波动函数,并设置三维图像生成模型,获得最终三维图像结果。
6、进一步的,声波或光波的第一水下波动模型,具体包括:
7、,
8、其中,为拉普拉斯算子,为用于描述在时间时水下位置处声波或光波的振幅及相位的第一波动函数,为在时间时水下位置处声波或光波的波速,为水下波动函数的第一调整因子,为水下波动函数的第二调整因子,为水下波动函数的第三调整因子,为用于描述声波或光波从水下位置处到水下位置处的传播和散射过程的格林函数,为用于描述在时间时水下位置处声波或光波的振幅及相位的波动函数。
9、进一步的,声波或光波的多频段耦合的第二水下波动模型,用于通过多频段的耦合,捕捉水下波动的细节,增强成像的精度,具体包括:
10、,
11、,
12、其中,为频段数,为用于描述在时间时水下位置处声波或光波的振幅及相位的第个频段的第二波动函数,为第个频段在时间时水下位置处声波或光波的波速,为第个频段的水下波动函数的第一调整因子,为第个频段和第个频段之间的耦合系数,为用于描述声波或光波的第个频段从水下位置处到第个频段水下位置处的传播和散射过程的格林函数,为用于描述在时间时水下位置处声波或光波的振幅及相位的第个频段的第二波动函数。
13、进一步的,将所述第一波动函数和所述第二波动函数进行加权平均,并进行傅里叶变换,生成最终水下波动函数。
14、进一步的,所述三维图像生成模型包括:
15、,
16、其中,为水下位置处的最终三维图像结果,为频率域的最终水下波动函数,为第个频段的最终水下波动函数的第一调整因子,为第个频段的最终水下波动函数的第二调整因子,为进行傅里叶变换后的频率域的格林函数。
17、本发明还提出一种水下地形及目标物的立体成像系统,包括:
18、探测模块,用于向水下地形及目标物发射声波或光波;
19、第一分析模块,用于设置声波或光波的第一水下波动模型,用于获取水下环境中的波动信息,包括波的衰减、散射和非线性效应;
20、第二分析模块,用于设置声波或光波的多频段耦合的第二水下波动模型,用于通过多频段的耦合,捕捉水下波动的细节,增强成像的精度;
21、图像生成模块,用于求解所述第一水下波动模型和所述第二水下波动模型,生成第一波动函数和第二波动函数,并设置三维图像生成模型,获得最终三维图像结果。
22、进一步的,声波或光波的第一水下波动函数,具体包括:
23、,
24、其中,为拉普拉斯算子,为用于描述在时间时水下位置处声波或光波的振幅及相位的波动函数,为在时间时水下位置处声波或光波的波速,为水下波动函数的第一调整因子,为水下波动函数的第二调整因子,为水下波动函数的第三调整因子,为用于描述声波或光波从水下位置处到水下位置处的传播和散射过程的格林函数,为用于描述在时间时水下位置处声波或光波的振幅及相位的波动函数。
25、进一步的,声波或光波的多频段耦合的第二水下波动函数,用于通过多频段的耦合,捕捉水下波动的细节,增强成像的精度,具体包括:
26、,
27、,
28、其中,为频段数,为用于描述在时间时水下位置处声波或光波的振幅及相位的第个频段的第二波动函数,为第个频段在时间时水下位置处声波或光波的波速,为第个频段的水下波动函数的第一调整因子,为第个频段和第个频段之间的耦合系数,为用于描述声波或光波的第个频段从水下位置处到第个频段水下位置处的传播和散射过程的格林函数,为用于描述在时间时水下位置处声波或光波的振幅及相位的第个频段的第二波动函数。
29、进一步的,将所述第一波动函数和所述第二波动函数进行加权平均,并进行傅里叶变换,生成最终水下波动函数。
30、进一步的,所述三维图像生成模型包括:
31、,
32、其中,为水下位置处的最终三维图像结果,为频率域的最终水下波动函数,为第个频段的最终水下波动函数的第一调整因子,为第个频段的最终水下波动函数的第二调整因子,为进行傅里叶变换后的频率域的格林函数。
33、总体而言,通过本发明所构思的以上技术方案与现有技术相比,具有以下有益效果:
34、本发明通过设置声波或光波的第一水下波动模型,用于获取水下环境中的波动信息,包括波的衰减、散射和非线性效应;设置声波或光波的多频段耦合的第二水下波动模型,用于通过多频段的耦合,捕捉水下波动的细节,增强成像的精度;设置三维图像生成模型,能够准确的对水下地形及目标物进行立体成像,获得最终三维图像结果。
技术特征:1.一种水下地形及目标物的立体成像方法,其特征在于,包括:
2.如权利要求1所述的一种水下地形及目标物的立体成像方法,其特征在于,声波或光波的第一水下波动模型,具体包括:
3.如权利要求2所述的一种水下地形及目标物的立体成像方法,其特征在于,声波或光波的多频段耦合的第二水下波动模型,用于通过多频段的耦合,捕捉水下波动的细节,增强成像的精度,具体包括:
4.如权利要求3所述的一种水下地形及目标物的立体成像方法,其特征在于,将所述第一波动函数和所述第二波动函数进行加权平均,并进行傅里叶变换,生成最终水下波动函数。
5.如权利要求4所述的一种水下地形及目标物的立体成像方法,其特征在于,所述三维图像生成模型包括:
6.一种水下地形及目标物的立体成像系统,其特征在于,包括:
7.如权利要求6所述的一种水下地形及目标物的立体成像系统,其特征在于,声波或光波的第一水下波动函数,具体包括:
8.如权利要求7所述的一种水下地形及目标物的立体成像系统,其特征在于,声波或光波的多频段耦合的第二水下波动函数,用于通过多频段的耦合,捕捉水下波动的细节,增强成像的精度,具体包括:
9.如权利要求8所述的一种水下地形及目标物的立体成像系统,其特征在于,将所述第一波动函数和所述第二波动函数进行加权平均,并进行傅里叶变换,生成最终水下波动函数。
10.如权利要求9所述的一种水下地形及目标物的立体成像系统,其特征在于,所述三维图像生成模型包括:
技术总结本发明公开一种水下地形及目标物的立体成像方法及系统,该方法包括:向水下地形及目标物发射声波或光波;设置声波或光波的第一水下波动函数,用于获取水下环境中的波动信息,包括波的衰减、散射和非线性效应;设置声波或光波的多频段耦合的第二水下波动函数,用于通过多频段的耦合,捕捉更多水下波动的细节,增强成像的精度;求解所述第一水下波动函数和所述第二水下波动函数,并设置三维图像生成模型,获得最终三维图像结果。技术研发人员:丁少春,黄勇,童玲婉,宋云衢,杨新峰,安楠,鲍习中受保护的技术使用者:宁波博海深衡科技有限公司技术研发日:技术公布日:2024/10/10本文地址:https://www.jishuxx.com/zhuanli/20241015/315516.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表