一种AGV路径规划知识驱动方法、装置及电子设备
- 国知局
- 2024-10-21 14:29:03
本发明涉及agv控制,尤其涉及一种agv路径规划知识驱动方法、装置及电子设备。
背景技术:
1、随着电子商务的快速发展,传统的劳动密集型物流系统已无法满足行业需求。为了提高物流效率,机器人移动拣货系统(rmfs,robotic mobile fulfillment systems)已被引入,并已成为智能仓储系统的基石。自动引导车(automated guided vehicle,简称agv)是在工业rmfs中使用的自主运输车辆,执行任务例如:无需人工干预的材料处理和沿预定义路径导航,从而显著提高效率并减少物品选择和数量上的错误。
2、rmfs集成了轨道、存储站和拣选站。agv沿着轨道行驶,由布局引导,而存储站则存放各种商品。由一排排架子组成的货架单元可以让agv在其下方双向移动,从而方便托盘运输。拣选站有助于选择和包装货物。agv任务涉及三个阶段:首先,agv移动到指定的架子位置,然后停在货架单元下,提起它,最后把货物运送到拣选站。
3、必须承认,对于具有多个自动引导车的复杂运输系统的安全操作而言,冲突检测至关重要。近年来,随着agv的普及以及交通场景的日益复杂,agv之间的冲突带来的安全风险已成为智能仓库系统面临的严重问题。这些情况可能会发生在各种运输环境中。这种agv之间的冲突会直接影响agv的操作效率,严重的agv冲突甚至可能导致车辆碰撞。
4、对于现有的相关技术中存在的agv行驶路径存在冲突的问题,目前还没有较好的解决方案。
技术实现思路
1、本发明提供一种agv路径规划知识驱动方法、装置及电子设备,用以解决现有技术中存在的agv行驶路径存在冲突的缺陷。
2、第一个方面,本发明提供一种agv路径规划知识驱动方法,包括:
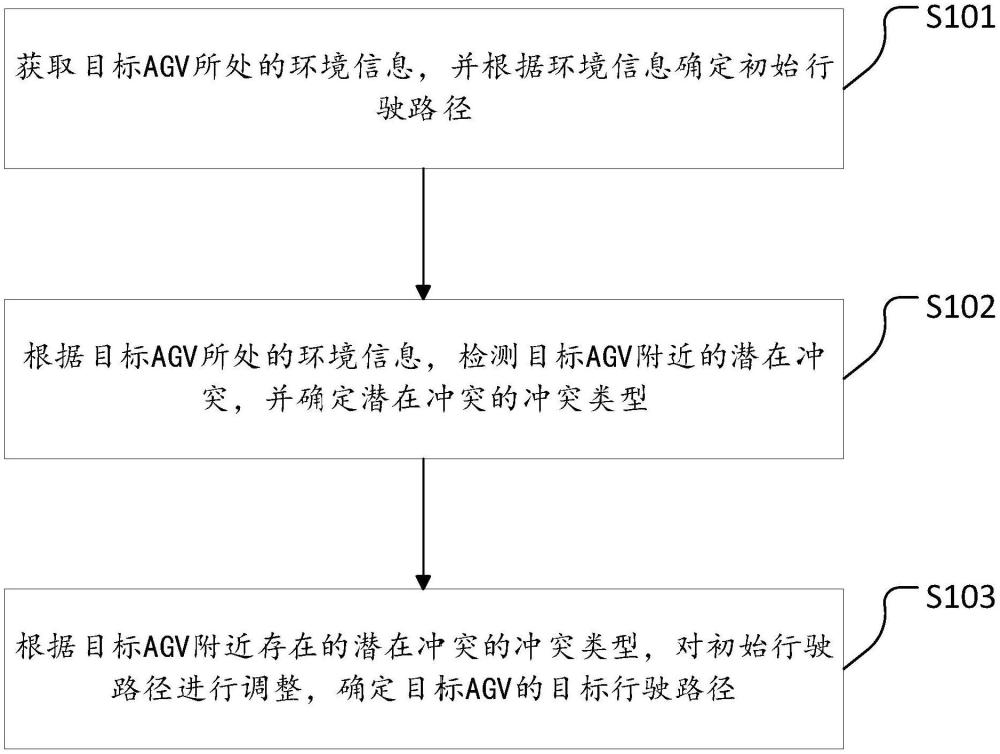
3、获取目标agv所处的环境信息,并根据所述环境信息确定初始行驶路径;
4、根据所述目标agv所处的环境信息,检测所述目标agv附近的潜在冲突,并确定所述潜在冲突的冲突类型;所述潜在冲突用于表征所述目标agv附近存在阻碍执行所述初始行驶路径的其他agv;
5、根据所述目标agv附近存在的潜在冲突的冲突类型,对所述初始行驶路径进行调整,确定所述目标agv的目标行驶路径。
6、根据本发明提供的一种agv路径规划知识驱动方法,获取目标agv所处的环境信息,并根据所述环境信息确定初始行驶路径,包括:
7、获取所述目标agv所处的环境信息,根据所述环境信息生成引导指令;
8、根据所述引导指令,从预先构建的算法库中选择对应的路径规划算法,确定所述初始行驶路径。
9、根据本发明提供的一种agv路径规划知识驱动方法,根据所述目标agv所处的环境信息,检测所述目标agv附近的潜在冲突,并确定所述潜在冲突的冲突类型,包括:
10、根据所述引导指令检测所述所述目标agv附近存在的其他agv;
11、调用预先配置的冲突识别工具,识别所述其他agv对于所述目标agv造成的潜在冲突的冲突类型。
12、根据本发明提供的一种agv路径规划知识驱动方法,根据所述目标agv附近存在的潜在冲突的冲突类型,对所述初始行驶路径进行调整,包括:
13、根据所述潜在冲突的冲突类型,调用预先配置的冲突处理工具,对所述目标agv的当前动作和初始行驶路径进行调整。
14、根据本发明提供的一种agv路径规划知识驱动方法,所述冲突识别工具和冲突处理工具在执行对应的任务前,均受到接收到的控制指令约束;所述控制指令包含了所述冲突识别工具或所述冲突处理工具的功能、使用方法以及执行顺序。
15、根据本发明提供的一种agv路径规划知识驱动方法,根据所述环境信息生成引导指令,包括:
16、从预先构建的历史数据库中查询与所述目标agv所处的环境信息相似的历史信息;所述历史信息包括若干历史环境信息以及对应的推理过程和最终输出的历史行驶路径;
17、根据所述环境信息和查询得到的所述历史信息,确定所述引导指令。
18、根据本发明提供的一种agv路径规划知识驱动方法,构建所述历史数据库,包括:
19、获取初始数据库;
20、根据所述历史环境信息,生成三维张量,并将所述三维张量存储至所述初始数据库;
21、将所述历史环境信息对应的推理过程和历史行驶路径转化为数据向量并存储至所述初始数据库中,得到所述历史数据库。
22、根据本发明提供的一种agv路径规划知识驱动方法,根据所述历史环境信息,生成三维张量,包括:
23、将所述历史环境信息转化成三个数据矩阵,三个所述数据矩阵分别用于表征历史agv的当前位置和目标位置、允许通过点位以及不允许通过点位;
24、将三个所述数据矩阵合并,形成所述三维张量。
25、第二个方面,本发明还提供一种agv路径规划知识驱动装置,包括:
26、获取模块,用于获取目标agv所处的环境信息,并根据所述环境信息确定初始行驶路径;
27、识别模块,用于根据所述目标agv所处的环境信息,检测所述目标agv附近的潜在冲突,并确定所述潜在冲突的冲突类型;所述潜在冲突用于表征所述目标agv附近存在阻碍执行所述初始行驶路径的其他agv;
28、规划模块,用于根据所述目标agv附近存在的潜在冲突的冲突类型,对所述初始行驶路径进行调整,确定所述目标agv的目标行驶路径。
29、第三个方面,本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述第一个方面所述的agv路径规划知识驱动方法。
30、第四个方面,本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述第一个方面所述的agv路径规划知识驱动方法。
31、第五个方面,本发明还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述第一个方面所述的agv路径规划知识驱动方法。
32、与现有技术相比,本发明具有以下有益效果:
33、本发明提供的agv路径规划知识驱动方法,通过根据目标agv周围的环境信息,检测附近是否存在会对目标agv按照初始行驶路径行驶造成阻碍的其他agv,如果检测到存在潜在冲突,则确定该潜在冲突的类型。并根据潜在冲突的冲突类型对初始行驶路径进行调整,消除目标agv在行驶过程中可能出现的冲突,将调整后的路径作为目标行驶路径。避免受到附近的其他agv的阻碍和干扰,减少出现目标agv与其他agv碰撞的情况,解决了现有的相关技术中存在的agv行驶路径存在冲突的问题。
技术特征:1.一种agv路径规划知识驱动方法,其特征在于,包括:
2.根据权利要求1所述的agv路径规划知识驱动方法,其特征在于,获取目标agv所处的环境信息,并根据所述环境信息确定初始行驶路径,包括:
3.根据权利要求2所述的agv路径规划知识驱动方法,其特征在于,根据所述目标agv所处的环境信息,检测所述目标agv附近的潜在冲突,并确定所述潜在冲突的冲突类型,包括:
4.根据权利要求3所述的agv路径规划知识驱动方法,其特征在于,根据所述目标agv附近存在的潜在冲突的冲突类型,对所述初始行驶路径进行调整,包括:
5.根据权利要求4所述的agv路径规划知识驱动方法,其特征在于,所述冲突识别工具和冲突处理工具在执行对应的任务前,均受到接收到的控制指令约束;所述控制指令包含了所述冲突识别工具或所述冲突处理工具的功能、使用方法以及执行顺序。
6.根据权利要求2所述的agv路径规划知识驱动方法,其特征在于,根据所述环境信息生成引导指令,包括:
7.根据权利要求6所述的agv路径规划知识驱动方法,其特征在于,构建所述历史数据库,包括:
8.根据权利要求7所述的agv路径规划知识驱动方法,其特征在于,根据所述历史环境信息,生成三维张量,包括:
9.一种agv路径规划知识驱动装置,其特征在于,包括:
10.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至8任一项所述agv路径规划知识驱动方法。
技术总结本发明提供一种AGV路径规划知识驱动方法、装置及电子设备,其中,该AGV路径规划知识驱动方法包括:获取目标AGV所处的环境信息,并根据所述环境信息确定初始行驶路径;根据所述目标AGV所处的环境信息,检测所述目标AGV附近的潜在冲突,并确定所述潜在冲突的冲突类型;所述潜在冲突用于表征所述目标AGV附近存在阻碍执行所述初始行驶路径的其他AGV;根据所述目标AGV附近存在的潜在冲突的冲突类型,对所述初始行驶路径进行调整,确定所述目标AGV的目标行驶路径。通过本发明,能够减少出现目标AGV与其他AGV碰撞的情况,解决了现有的相关技术中存在的AGV行驶路径存在冲突的问题。技术研发人员:蔡波,于耀翔,李云龙,杨弘毅,罗剑受保护的技术使用者:武汉大学技术研发日:技术公布日:2024/10/17本文地址:https://www.jishuxx.com/zhuanli/20241021/318313.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。