一种基于激光的矿山巷道全断面收敛变形监测系统及方法
- 国知局
- 2024-10-21 14:40:08
本发明属于采矿工程巷道收敛变形监测,具体为一种基于激光的矿山巷道全断面收敛变形监测系统及方法。
背景技术:
1、矿产资源开发是保证社会稳定、经济发展的重要物质基础,随着地球浅部矿产资源日渐枯竭,矿山开采活动不断向地球深部延伸,由此带来高地应力、高三高一的恶略开采环境,深部采矿巷道围岩将会遇到巨大变形等问题,巷道顶板垮塌、冲击地压等严重的矿山地质灾害发生频率也大大增加。
2、因此,快速获取并揭示采矿巷道全断面收敛变形特征及演化规律,对于全面反映巷道掘进期间围岩应力分布,有效揭示采动影响下巷道变形破坏机制至关重要,可以为提出科学合理的围岩变形控制技术,及时有效地控制采动巷道地压显现提供数据基础。隧道工程中使用的激光扫描仪、全站仪等虽然可以测得巷道全断面收敛变形,但需要从距离采场较远的稳定岩体位置设置基点,并经过较长的引线路径,最终确定采矿巷道测点的坐标值,在此基础上使用激光扫描仪、全站仪等装置测量巷道收敛变形。该类测量技术的实施还需要三角架、托盘等辅助工具配合,携带大量监测装置至井下作业区域会带来运输路程长,时间成本高、井下操作便捷性差等诸多缺点,且占用巷道空间测量期间中途无法暂停,对井下采矿作业形成长时间干扰,以上多方面因素造成其无法在矿山巷道收敛变形日常监测中大规模使用。
3、现有的采矿巷道收敛变形方法及装置存在以下缺点:
4、1.地下采矿工程中的巷道收敛监测多采用十字布点法,该方法在巷道顶板、底板、两帮表面设置若干测点,在测点之间布置若干条测线,通过测线长度的变化来反映巷道断面的收敛变形,但该方法仅能测得巷道测点位置处的数据,无法监测巷道全断面收敛变形规律,获得的巷道收敛变形数据较为有限,且该方法获得的监测结果属于巷道围岩表面两测点间的相对变形量,无法反映巷道表面某位置的绝对收敛变形情况。
5、2.现有巷道收敛变形监测基准点设置方法及其缺点:(1)从不受采矿与其他地下工程影响的离采场较远的已知坐标基点,沿着已有巷道逐点引线至目标巷道断面基准点处,考虑到地下矿山巷道工程布置的复杂环境,以及地下工作时视线差、干扰多、地板不平等困难条件,该项工作会耗费较高的人力与时间成本,并严重影响地下开采各项工序的连续运行;(2)在顶板、底板、两帮表层设置基准点,但在掘进或采矿应力扰动作用下,巷道围岩表层发生明显的收敛变形造成基准点移动,对多次测量特别是长期测量情况下的测量带来较大误差,而且底板与低帮位置处的基准点还容易受到矿车运输或者补充支护作业的破坏。
6、3.现有采矿巷道全断面收敛变形大多通过对巷周少量测点变形数据进行线性插值所得,实际上为了更好抵抗采动应力引起的围岩变形,巷道顶板通常设置为拱形,这就需要非线性插值方法才能得到更加平滑的插值曲线,另外线性插值对于拱形断面巷道插值来讲,较少的测点无疑会造成更大的误差,因此在拱形巷道全断面收敛测量中选择非线性插值方法更为合适。
技术实现思路
1、为了弥补现有矿山巷道收敛变形监测技术的不足,本发明提供了一种基于激光的矿山巷道全断面收敛变形监测系统及方法,通过以下的技术方案来实现:
2、一种基于激光的矿山巷道全断面收敛变形监测方法,包括以下步骤:
3、步骤1.使用激光测距仪测量从断面的左帮/右帮的基准点到断面的右帮/左帮的基准点的距离lmn,使用激光测距仪测量从断面的左帮和右帮的基准点到断面轮廓上各测量点的距离lmi和lni,所述断面的左帮/右帮的基准点等高,i为各测量点的编号;
4、步骤2.以两个基准点的连线的中点为原点,使用步骤1测量得到的数据计算倾角二β、原点与各测量点的距离lji及倾角一α,倾角一α为原点与各测量点的连线与原点右侧水平面的夹角,倾角二β为断面的左帮基准点与断面轮廓上各测量点的连线与原点右侧水平面的夹角,得到各测量点相对原点的坐标(xih0,yih0),h0为基准点的初始高度;
5、cosβ=(lmi²+lmn²-lni²)/(2·lmi·lmn);
6、lji²=lmi²+(lmn/2)²-2·lmi·lmn/2·cosβ;
7、cosα =[ lji²+(lmn/2)²-lni²]/[2·lji·(lmn/2)];
8、xih0=lji·sinα;
9、yih0=-lji·cosα;
10、步骤3.在下一个监测周期重复步骤1~2,获得该监测周期内各测量点相对原点的坐标(xihf,yihf),hf为第f个监测周期测量的基准点的高度,将各监测周期获得的各测量点相对原点的坐标平移到同一个坐标系:
11、x'i(0)=xih0, y'i(0)=yih0;
12、x'i(f)=xihf+hf-h0,y'i(f)=yihf;
13、步骤4. 基于断面中线将全部各测量点分为左右两区域,分别保存各监测周期内两区域各测量点的坐标信息,使用matlab中的样条插值方法分别对各监测周期获得的两区域各测量点的坐标进行插值计算,分别得到各监测周期内两区域巷周插值点坐标值,基于插值结果在matlab软件中绘制函数曲线,分别获取各监测周期这两个区域的巷道断面轮廓图形,将同一监测周期内两个区域的断面轮廓拼接在一起,并同时呈现在同一直角坐标系中,得到多个监测周期内巷道全断面收敛变形情况。
14、进一步的,步骤1包括:
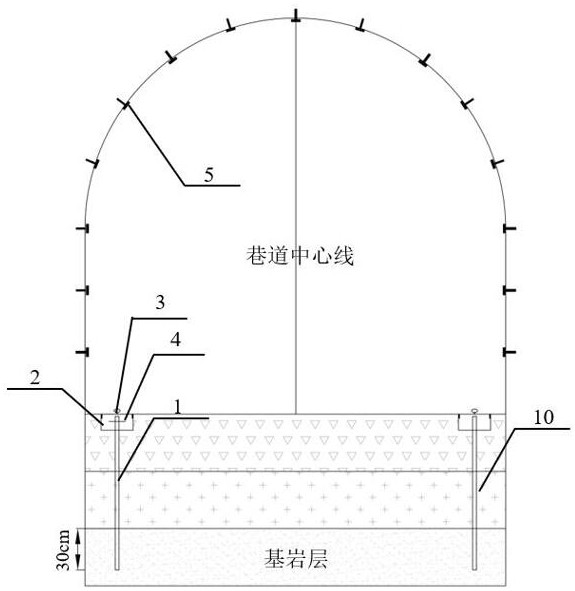
15、s01:在巷道的一处断面靠近两帮的位置对称安装两个监测装置基盘,沿所述断面轮廓线固定多个靶标盘,所述测量点为靶标盘的中心;
16、s02:在第一个监测装置基盘上安装设有激光测距仪的基座,在第二个监测装置基盘上安装较高标靶,调节基座使激光测距仪射出的激光光线平行于监测装置基盘上表面,调整两个监测装置基盘的上表面至等高且水平的位置,使激光光线投射到较高标靶中心,记录激光测距仪测出的两个监测装置基盘的距离lmn,同时记录第一个监测装置基盘上表面相对基准面的距离h0,基准面包括巷道的底板、监测装置基盘的下表面,测量并记录激光测距仪的光源点至各靶标盘中心点的距离lmi;
17、s03:保持两个监测装置基盘的位置不变,将激光测距仪及基座与较高标靶的位置互换,测量并记录激光测距仪的光源点至各靶标盘中心点的距离lni;其中,i为靶标盘的编号;步骤1:在巷道的一处断面靠近两帮的位置对称安装两个监测装置基盘,沿所述断面轮廓线固定多个靶标盘;
18、所述基准点包括激光测距仪的光源点、较高标靶的中心,基座和较高标靶分别安装于两个监测装置基盘时,较高标靶的中心和光源点分别位于两个监测装置基盘的中轴线上。
19、进一步的,所述监测装置基盘包括顶盘与底盘,顶盘与底盘之间设有至少三个可调高度的支腿,所有支腿围绕顶盘与底盘的中心均匀布置。
20、进一步的,所述基座和较高标靶与顶盘的中心可拆卸连接,基座与激光测距仪转动连接,使基座安装在顶盘上时,激光测距仪可在垂直于顶盘的平面内转动,所述较高标靶安装在顶盘上时与顶盘垂直,所述较高标靶的中心与顶盘中心的距离等于激光测距仪与基座的转动轴到顶盘中心的距离。
21、进一步的,所述基准点的高度或初始高度替换为顶盘与底盘的中心的距离。
22、步骤4中分别保存的各监测周期内两区域各测量点的坐标信息为由(x'i(f),y'i(f))转换成的以原点为极点,以原点上方的竖直线为极轴的极坐标(ti(f), ri(f));
23、步骤4中使用matlab中的样条插值方法分别对各监测周期获得的两区域各测量点的坐标进行插值计算,分别得到各监测周期内两区域巷周插值点坐标值,基于插值结果在matlab软件中绘制函数曲线,分别获取各监测周期这两个区域的巷道断面轮廓图形,将同一监测周期内两个区域的断面轮廓拼接在一起,并同时呈现在同一直角坐标系中包括:
24、x1.将巷道断面左半轮廓测点的极坐标值存储在xyk矩阵中,第一列数据为极角分量坐标ti(f),第二列数据为极径分量坐标ri(f);
25、x2.将矩阵第一列数据与第二列数据分别赋值给临时数组t0与r0;
26、x3.设置巷道断面左半轮廓插值点的个数与极角坐标插值范围;
27、x4.通过三次样条插值计算出巷道断面左半轮廓插值点的极径坐标分量;
28、x5.将插值点的极坐标转化为直角坐标;
29、x6.依据插值点直角坐标绘制巷道断面左半轮廓;
30、x7.将巷道断面右半轮廓测点的极坐标值存储在xyl矩阵中,第一列数据为极角分量坐标ti(f),第二列数据为极径分量坐标ri(f);
31、x8.重复步骤x2~x6绘制出巷道断面右半轮廓,从而获得完整的巷道断面轮廓线。
32、进一步的,一种计算机设备,存储器和处理器,所述存储器和所述处理器之间互相通信连接,所述存储器中存储有计算机指令,所述处理器通过执行所述计算机指令,从而根据在各个监测周期采集的监测数据执行所述的基于激光的矿山巷道全断面收敛变形监测方法的步骤2~4,得到多个监测周期内巷道全断面收敛变形情况;
33、监测数据包括:从断面的左帮/右帮的基准点到断面的右帮/左帮的基准点的距离lmn、从断面的左帮和右帮的基准点到断面轮廓上各测量点的距离lmi和lni、基准点的高度hf。
34、进一步的,一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机指令,所述计算机指令用于使计算机根据在各个监测周期采集的监测数据执行所述的基于激光的矿山巷道全断面收敛变形监测方法的步骤2~4,得到多个监测周期内巷道全断面收敛变形情况;
35、监测数据包括:从断面的左帮/右帮的基准点到断面的右帮/左帮的基准点的距离lmn、从断面的左帮和右帮的基准点到断面轮廓上各测量点的距离lmi和lni、基准点的高度hf。
36、本发明具有以下优点和积极效果:
37、(1)能够反映矿山巷道全断面收敛变形,相较于现有巷道收敛监测主要测量巷道顶板下沉量、 底鼓量、 两帮移近量等指标,本发明中提出的矿山巷道收敛变形监测方法及装置可以获取巷道断面各位置处的单次收敛变形与累积收敛变形。
38、(2)稳定性与准确性高。首先,由于该发明中预埋支撑杆穿过巷道底板较软的表层岩体,预埋在较为稳固的基岩内部一定深度,保证预埋支撑杆及其以上装置不会随底板表层的变形而移动,此外,预埋支撑杆上端设置了金属保护盒,与支撑杆一同全部埋入地下,只有进行巷道监测时才会打开保护盒并将监测装置安装在支撑杆上端,该设置可以有效地对支撑杆形成保护,避免井下巷道支护,采运矿车行驶等作业时对支撑杆造成破坏。而现有技术中采用的基于巷道断面表面设置的基准点,采动应力干扰会使得基准点发生偏移,且容易受到采矿活动的破坏,重新从距离采场较远的稳定区域引点,会耗费大量的人力物力。
39、其次,由于预埋支撑杆固定于底板基岩一定深度,不随底鼓变形而产生相对移动,每次测量时将监测装置基盘安装至支撑杆的指定位置,调平激光测距仪后再将另一个监测装置基盘上的较高标靶调至相同高度,保证了激光测距仪光源点、较高标靶中心点以及预埋测点三点连线形成一个底边水平的三角形,从而根据三角形角边关系可以顺利计算出预埋测点的坐标值,之后每次监测时监测装置基盘中三角螺旋首轮位置处上下两盘面之间的距离的平均值对预埋测点坐标进行修正,保证了各个监测周期内计算得出的预埋测点坐标的统一性。
40、再次,基座背面通过螺栓与l形钢板的竖板相连接,l形钢板的横板通过螺栓与监测装置基盘顶部相连接,且横板螺栓与竖板螺栓的轴线相交于激光测距仪光源点,保证了对激光测距仪射线角度进行调解时,其光源点的位置始终不变。较高标靶可以通过螺栓固定在监测装置基盘顶部,且激光测距仪光源点到监测装置基盘顶面的高度与较高标靶中心点到监测装置基盘顶面的高度相等,保证了用激光测距仪代替较高标靶对预埋测点进行测量时,标靶中心与激光测距仪光源点的位置始终重合。
41、最后,本发明对巷道收敛变形监测中采用较少量巷周预埋测点,对巷道表面围岩扰动较小,考虑到少量测点对插值精度的影响,本发明为基于少量巷周预埋测点坐标绘制出精确度较高的矿山巷道断面形状提供了便捷的计算处理方法,利用样条插值方法对预埋测点坐标进行插值通过而,而现有采矿巷道断面测量技术中多采用线性插值方法,据此绘制的巷道断面形状在拱形断面部位精确度较差。
42、(3)本发明的其它技术优点:监测装置体积小重量轻,可以随身携带,监测方法操作简便用时较短,便捷程度大大提高,减少了对矿山现场生产的影响;监测结果为巷道断面表面测点的真实坐标,据此可以计算得出测点的绝对位移大小及方向,传统矿山巷道收敛监测方法通常获得的时两点沿连线方向的相对位移,与之相比该发明可以明确巷道表面各点的实际收敛变形。
本文地址:https://www.jishuxx.com/zhuanli/20241021/318914.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表