用于自推进式操作机器的伸缩臂的制作方法
- 国知局
- 2024-10-21 14:59:37
本发明涉及一种用于自推进式操作机器的伸缩臂。
背景技术:
1、更具体地,根据本发明的臂可以用于任何类型的操作机器,例如固定型和旋转型的伸缩臂叉车、机械手、起重机、空中平台。
2、这些操作机器用于各种行业(建筑工程、农业、采矿等),并且可以例如由伸缩臂叉车构成,该伸缩臂叉车包括能在轨道上或车轮上运动的设置有框架的车辆,该框架安装驾驶室和可以伸缩地延伸的提升臂。
3、在臂的远端处,存在用于提升或移动负载的设备或“附件”,该设备或“附件”包括诸如叉、夹具等工具。
4、臂铰接到机器的框架或旋转平台,并且设计成在基本上水平的下部位置与臂接近竖直的上部位置之间倾斜;该倾斜通过液压缸等驱动。
5、臂包括以伸缩方式连接的多个滑动部段,该多个滑动部段具有管状形状并且具有的截面逐个减小。
6、已知使用一种链式连杆装置的系统,该装置将第一滑动构件连接到连续的内部滑动构件,并且配置成使得第一滑动构件在液压缸的致动下所经受的抽出冲程或返回冲程也传递到其他滑动构件。
7、最后的滑动部段连接到工作工具,例如叉、夹具、钩等。
8、臂必须达到的提升高度越大,要使用的滑动构件的数量就必须越多。
9、因此,滑动构件的数量的增加或臂必须支撑的负载的增加使得臂的整体结构的机械应力增加。
10、实际上,负载和/或延伸量的增加受到因此降低的臂功能性机械强度的限制。
11、不利地,对制造伸缩臂的材料和/或厚度采取措施将使得整个机器的重量增加和成本的显著增加。
12、这种情况构成了对可以承载负载的现有技术臂的提升高度的限制,该限制包括对最大允许延伸量和可以移动的最大负载的约束。
技术实现思路
1、因此,本发明的技术目的是提供一种能够克服现有技术缺点的用于自推进式操作机器的伸缩臂。
2、所指示的技术目的和所指定的目标基本上通过包括在一个或多个所附权利要求中描述的技术特征的一种用于自推进式操作机器的伸缩臂来实现。从属权利要求对应于本发明的可能的实施方式。
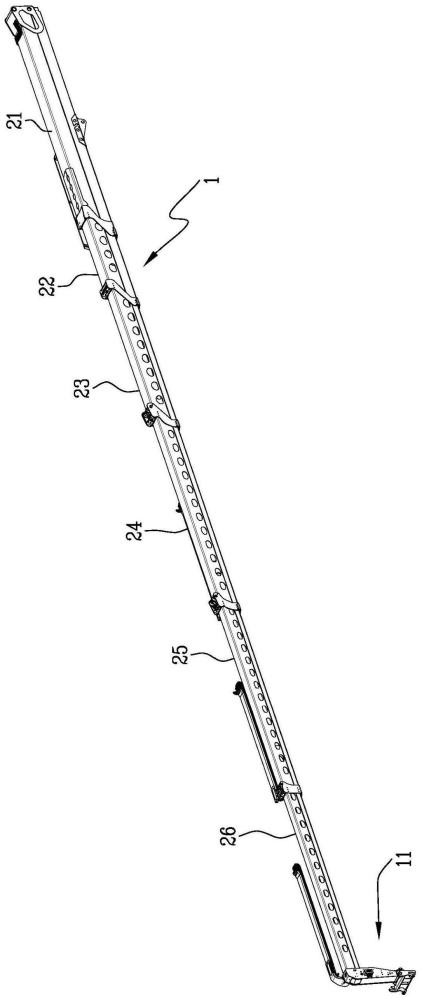
技术特征:1.一种用于自推进式操作机器(10)的伸缩式提升臂(1),所述自推进式操作机器诸如是伸缩臂叉车、空中平台等,所述伸缩式提升臂包括至少三个管状元件(21,22,23,24,25,26),至少三个所述管状元件具有的截面逐个减小并且至少三个所述管状元件伸缩地连接到彼此以限定支撑结构,所述支撑结构设计成在收起构造与伸长构造之间移动,在所述收起构造中,所述管状元件(21,22,23,24,25,26)中的一个管状元件插入另一个管状元件中,在所述伸长构造中,至少两个所述管状元件被至少部分地抽出,其特征在于,所述伸缩式提升臂包括致动装置(5),所述致动装置与所述管状元件(21,22,23,24,25,26)相关联,并且配置成用于致动所述管状元件(21,22,23,24,25,26)中的至少两个管状元件,以将至少两个所述管状元件彼此独立地且以不同的速度拉出。
2.根据权利要求1所述的伸缩式提升臂(1),其中,所述致动装置(5)以具有两个独立级的单液压致动器(5)的形式制成,所述单液压致动器配备有伸缩地连接到彼此的至少三个液压元件(41,42,43),所述液压元件(41,42,43)中的每个液压元件独立地连接到所述支撑结构的相应的所述管状元件(21,22,23,24,25,26)。
3.根据权利要求1所述的伸缩式提升臂(1),包括彼此独立的两个液压致动器(5a,5b),其中,每个所述液压致动器(5a,5b)配备有伸缩地连接到彼此的至少两个液压元件(41,42,43),所述液压致动器(5a,5b)中的每个液压致动器以及每个所述液压元件(41,42,43)均独立地连接到所述支撑结构的相应的所述管状元件(21,22,23,24,25,26)。
4.根据权利要求2或3所述的伸缩式提升臂(1),其中,所述管状元件(21,22,23,24,25,26)包括:近侧管状元件,设计成铰接到所述自推进式操作机器(10)的框架或塔架(20);以及至少两个拉出元件,由所述支撑结构的多个所述管状元件(21,22,23,24,25,26)构成,远侧的所述拉出元件(26)设计成支撑工作设备并且能移动,并且能够至少部分地容纳在另一个所述拉出元件(25)中,至少两个所述拉出元件(22,23)连接到所述致动装置(5)的相应的所述液压元件(41,42,43)。
5.根据权利要求4所述的伸缩式提升臂(1),其中,所述致动装置(5)配置成使连接到或能连接到远侧的所述拉出元件(26)的所述液压元件(41,42,43)的延伸速度大于连接到或能连接到所述近侧管状元件(21)的所述液压元件(41,42,43)的延伸速度。
6.根据权利要求2至5中任一项所述的伸缩式提升臂(1),包括:主阀(6),连接到或能连接到所述致动装置(5),用于向所述致动装置(5)供应油;以及控制阀(7),在所述主阀(6)与所述致动装置(5)之间,所述控制阀(7)配置成同时地且以不同的速度致动所述致动装置(5)的每个所述液压元件(41,42,43)。
7.根据权利要求6所述的伸缩式提升臂(1),其中,所述控制阀(7)设计成从所述主阀(6)的单个区段接收油,并且设计成控制所述油在所述致动装置(5)的一个或多个腔室(8a,8b,9a,9b)中的输送和返回,以用于相应的所述液压元件(41,42,43)的滑动和返回。
8.根据权利要求7所述的伸缩式提升臂(1),其中,所述控制阀(7)包括用于所述致动装置(5)的每个腔室(8a,8b,9a,9b)的比例阀。
9.根据权利要求7所述的伸缩式提升臂(1),其中,所述控制阀(7)包括用于为所述致动装置(5)的每对所述腔室(8a,8b,9a,9b)分配流量的阀,每对腔室(8a,8b,9a,9b)由同一所述液压元件(41,42,43)的两个腔室限定。
10.根据权利要求7所述的伸缩式提升臂(1),其中,所述控制阀(7)由在所述主阀(6)与所述致动装置(5)之间的两个截止阀(7a,7b)限定;所述截止阀(7a,7b)中的每个截止阀连接到所述主阀(6)的相应区段,以用于独立地控制每个所述液压元件(41,42,43)。
11.根据权利要求6至10中任一项所述的伸缩式提升臂(1),包括控制单元,所述控制单元配置成用于调节所述主阀(6)和/或所述控制阀(7),以使所述液压元件(41,42,43)移动来限定所述管状元件(21,22,23,24,25,26)的具体操作位置。
12.根据权利要求11所述的伸缩式提升臂(1),包括彼此独立并连接到所述控制单元的至少两个滑动传感器;所述滑动传感器配置成测量所述液压元件(41,42,43)的延伸量,并且向所述控制单元发送检查信号,以确认所述液压元件(41,42,43)的延伸量,即确认所述管状元件(21,22,23,24,25,26)的延伸量。
技术总结描述了一种用于自推进式操作机器(10)的伸缩式提升臂(1),该伸缩式提升臂包括至少三个管状元件(21,22,23,24,25,26),该至少三个管状元件具有的截面逐个减小并且至少三个管状元件伸缩地连接到彼此以限定支撑结构,该支撑结构设计成在收起构造与伸长构造之间移动,在该收起构造中,这些管状元件(21,22,23,24,25,26)中的一个插管状元件入另一个管状元件中,在该伸长构造中,至少两个管状元件被部分地抽出。臂(1)包括致动装置(5),该致动装置与管状元件(21,22,23,24,25,26)相关联,并且配置成用于致动至少两个管状元件,以将该两个管状元件彼此独立地且以不同的速度拉出。技术研发人员:马尔科·艾奥蒂受保护的技术使用者:马尼托意大利有限责任公司技术研发日:技术公布日:2024/10/17本文地址:https://www.jishuxx.com/zhuanli/20241021/320106.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。