灵巧手和机器人的制作方法
- 国知局
- 2024-10-21 15:06:09
本技术涉及机器人,具体涉及一种灵巧手和机器人。
背景技术:
1、人手具有不低于21个自由度,手指部分每个手指有4个自由度,大拇指有5个自由度,灵巧手的设计目标是从形态和功能上尽量拟人。目前灵巧手按自由度和拟人性,可以分为高度拟人灵巧手,中高自由度灵巧手和低自由度灵巧手。高度拟人灵巧手基本复现了人手的自由度,但是尺寸较大,拟人性差。低自由度灵巧手基本没有侧摆功能,灵巧性差,无法完成三指协同拧瓶盖等动作。中高自由度灵巧手,虽然灵巧性有一定的提升,但是尺寸也较大,拟人性依然较差。
2、因此,目前的灵巧手无法同时兼顾灵巧性和拟人性。
技术实现思路
1、有鉴于此,本技术实施例提供了一种灵巧手和机器人,解决了灵巧手无法同时兼顾灵巧性和拟人性的问题。
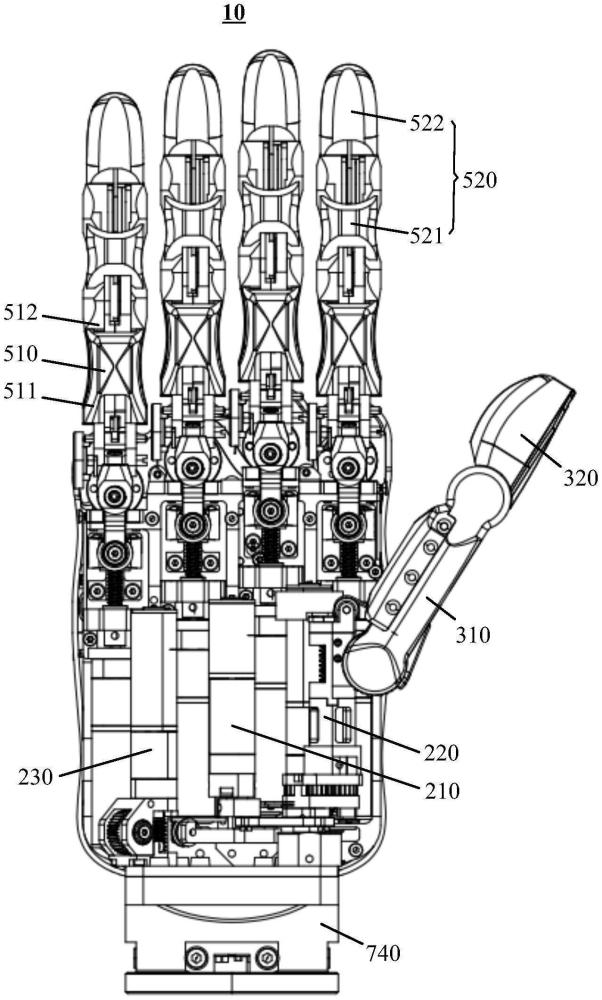
2、第一方面,本技术的实施例提供了一种灵巧手,包括:手掌基板;掌骨驱动组件,设置于所述手掌基板;掌指驱动组件,与所述手掌基板绕第一轴线可转动连接,且与所述掌骨驱动组件连接,在所述掌骨驱动组件的驱动下绕所述第一轴线转动,其中,所述第一轴线与所述手掌基板平行;第一拇指指节,与所述掌指驱动组件绕第二轴线可转动连接,在所述掌指驱动组件的驱动下绕所述第二轴线转动,所述第二轴线与所述第一轴线垂直;第二拇指指节,与所述第一拇指指节绕第三轴线可转动连接,所述第三轴线与所述第二轴线平行;第一腱绳,所述第一腱绳的第一端与所述第二拇指指节连接;第一腱绳驱动组件,设置于所述手掌基板,与所述第一腱绳的第二端连接,被配置为驱动所述第一腱绳运动,以使所述第一腱绳拉动所述第二拇指指节绕所述第三轴线转动;多个侧摆组件,分别与所述手掌基板绕各自的第四轴线可转动连接,所述第四轴线与所述手掌基板垂直;多个第一指节,分别与多个所述侧摆组件绕各自的第五轴线可转动连接,所述第五轴线与所述第四轴线垂直;多个指节组件,分别与多个所述第一指节绕各自的第六轴线可转动连接,所述第六轴线与所述第五轴线平行;侧摆驱动组件,设置于所述手掌基板,与至少两个所述侧摆组件连接,被配置为驱动至少两个所述侧摆组件绕各自的所述第四轴线转动;多个弯曲驱动组件,设置于所述手掌基板,分别与多个所述第一指节连接,被配置为分别驱动多个所述第一指节绕各自的所述第五轴线转动;多条第二腱绳,多条所述第二腱绳各自的第一端分别与多个所述指节组件连接;多个第二腱绳驱动组件,设置于所述手掌基板,分别与多条所述第二腱绳各自的第二端连接,被配置为分别驱动多条所述第二腱绳运动,以使多条所述第二腱绳分别拉动多个所述指节组件绕各自的所述第六轴线转动;其中,所述手掌基板具有依次层叠设置的手心容纳空间、中间容纳空间和手背容纳空间;其中,所述掌骨驱动组件、所述掌指驱动组件和所述第一腱绳驱动组件在所述手心容纳空间呈单层排布;多个所述弯曲驱动组件在所述中间容纳空间呈单层排布;多个所述第二腱绳驱动组件和所述侧摆驱动组件在所述手背容纳空间呈单层排布。
3、在一些实施例中,所述掌骨驱动组件、所述掌指驱动组件和所述第一腱绳驱动组件均沿第一方向延伸,并沿第二方向依次排列,所述第二方向与所述第一方向垂直;多个所述弯曲驱动组件均沿所述第一方向延伸,并沿所述第二方向依次排列;多个所述第二腱绳驱动组件均沿所述第一方向延伸,并沿所述第二方向依次排列;所述侧摆驱动组件沿所述第二方向延伸,并与所述第二腱绳驱动组件的靠近所述第一指节的一端相邻设置,或者,所述侧摆驱动组件沿所述第一方向延伸,并与所述第二腱绳驱动组件平行设置。
4、在一些实施例中,多个所述弯曲驱动组件沿所述第二方向依次间隔设置,相邻的所述弯曲驱动组件之间具有间隙;其中,所述掌骨驱动组件、所述掌指驱动组件和所述第一腱绳驱动组件中的至少一个的至少部分结构伸入所述间隙。
5、在一些实施例中,灵巧手还包括:腱绳导向件,设置于所述手掌基板的靠近所述第二腱绳驱动组件的一侧,其中,所述腱绳导向件具有多个腱绳孔;多个套管,分别穿设于多个所述腱绳孔,其中,多条所述第二腱绳由多个所述指节组件分别穿过多个所述套管,与多个所述第二腱绳驱动组件连接,其中,所述套管的材料包括柔性润滑材料。
6、在一些实施例中,灵巧手还包括:视觉模块,设置于所述腱绳导向件的远离所述手掌基板的一侧,被配置为获取所述灵巧手周围的图像。
7、在一些实施例中,灵巧手还包括:手腕底座,与所述手掌基板连接,其中,所述手腕底座具有中心孔;散热装置,设置于所述中心孔,并朝向所述手掌基板吹风。
8、在一些实施例中,灵巧手还包括:电源板,设置于所述中心孔,被配置为为所述散热装置、所述掌骨驱动组件、所述掌指驱动组件、所述第一腱绳驱动组件、所述侧摆驱动组件、所述弯曲驱动组件和所述第二腱绳驱动组件供电。
9、在一些实施例中,所述掌指驱动组件包括:掌指驱动源,与所述手掌基板绕所述第一轴线可转动连接,且与所述掌骨驱动组件连接;第一蜗杆,与所述掌指驱动源连接,在所述掌指驱动源的驱动下旋转,其中,所述第一蜗杆具有沿所述第一蜗杆的延伸方向贯穿所述第一蜗杆的第一轴心孔;第一蜗轮,与所述掌指驱动源绕所述第二轴线可转动连接,所述第一蜗轮与所述第一蜗杆啮合,在所述第一蜗杆的带动下绕所述第二轴线转动,其中,所述第一拇指指节与所述第一蜗轮固定连接,以在所述第一蜗轮的带动下,绕所述第二轴线转动;至少一个第一导轮,与所述掌指驱动源绕第七轴线可转动连接,所述第一导轮位于所述第一蜗杆的靠近所述第一指节的一端,所述第七轴线与所述第二轴线平行;其中,所述第一腱绳由所述第二拇指指节依次经过所述第一拇指指节、绕过所述第一导轮的远离所述第一蜗杆的一侧、穿过所述第一轴心孔、与所述第一腱绳驱动组件连接。
10、在一些实施例中,灵巧手还包括:至少一个第二导轮,与所述第一拇指指节绕第八轴线可转动连接,所述第八轴线与所述第二轴线平行;其中,所述第一腱绳由所述第二拇指指节依次绕过所述第二导轮的靠近所述第一蜗轮的一侧、绕过所述第一导轮的远离所述第一蜗杆的一侧、穿过所述第一轴心孔、与所述第一腱绳驱动组件连接。
11、在一些实施例中,所述第一蜗轮、所述第一导轮和所述第二导轮和所述第一腱绳之间的位置关系满足以下公式:km+mn+np=2*r*sin(θ/2)*cosβ+(5*π/2-2*β-γ)*r,其中,km表示所述第一腱绳与所述第二导轮的接触长度,mn表示所述第一导轮与所述第二导轮之间的所述第一腱绳的长度,np表示所述第一腱绳与所述第一导轮的接触长度,θ表示∠o1oo2,β表示∠o1o2m,γ表示∠qo1s,o表示所述第一蜗轮在所述手掌基板上的正投影的第一圆心,o1表示所述第一导轮在所述手掌基板上的正投影的第二圆心,o2表示所述第二导轮在所述手掌基板上的正投影的第三圆心,m表示所述第一腱绳与所述第二导轮的靠近所述第一导轮的第一切点,q表示所述第一圆心与所述第二圆心的连线的延长线与所述第一导轮的边缘的第一交点,s表示经过所述第二圆心的垂线与所述第一导轮的远离所述第一蜗轮的边缘的第二交点,r表示所述第一圆心与所述第二圆心的第一连线的长度,r表示所述第一导轮的半径;其中,所述第一连线的长度等于所述第一圆心与所述第三圆心的第二连线的长度;所述第一导轮的半径等于所述第二导轮的半径。
12、在一些实施例中,所述第一腱绳驱动组件包括:第一腱绳驱动源,设置于所述手掌基板;第二蜗杆,与所述第一腱绳驱动源连接,在所述第一腱绳驱动源的驱动下旋转,所述第二蜗杆的延伸方向与所述第一轴线的延伸方向平行;蜗轮轴,与所述第一腱绳驱动源绕第九轴线可转动连接,其中,所述第九轴线与所述第二蜗杆的延伸方向垂直;第二蜗轮,与所述蜗轮轴同轴连接,以通过所述蜗轮轴与所述第一腱绳驱动源绕所述第九轴线可转动连接,所述第二蜗轮与所述第二蜗杆啮合,在所述第二蜗杆的带动下,所述第二蜗轮绕所述第九轴线转动;其中,所述第一腱绳的第二端与所述蜗轮轴连接,以利用所述蜗轮轴的转动拉动所述第一腱绳。
13、在一些实施例中,所述弯曲驱动组件包括:连杆组件,包括依次可转动连接的至少四个连杆,第一个所述连杆与所述第一指节绕第十轴线可转动连接,至少四个所述连杆之间的转动轴线至少包括第十一轴线、第十二轴线和第十三轴线,其中,所述第十轴线与所述第五轴线平行,所述第十一轴线与所述第十轴线垂直,所述第十二轴线与所述第十一轴线垂直且与所述第十轴线垂直,所述第十三轴线与所述第十二轴线平行;第一驱动组件,包括相互连接的第一固定件和第一活动件,所述第一固定件与所述手掌基板连接,最后一个所述连杆相对于所述第一活动件绕第十四轴线可转动连接,所述第十四轴线与所述第十三轴线垂直且与所述第四轴线垂直,其中,所述第一固定件能够驱动所述第一活动件沿第一方向运动,以利用所述第一活动件带动所述连杆组件运动,使所述连杆组件带动所述第一指节绕所述第五轴线转动,所述第一方向与所述第十三轴线垂直且与所述第十四轴线垂直。
14、在一些实施例中,所述指节组件包括:第二指节,所述第二指节的第一端与所述第一指节的第二端绕所述第六轴线可转动连接;第三指节,所述第三指节的第一端与所述第二指节的第二端绕第十五轴线可转动连接,所述第十五轴线与所述第六轴线平行;其中,所述第二腱绳的第一端与所述第三指节的第二端连接,所述第二腱绳驱动组件能够拉动所述第二腱绳,以使所述第二腱绳拉动所述第二指节绕所述第六轴线转动,且拉动所述第三指节绕所述第十五轴线转动。
15、在一些实施例中,多个所述第一指节包括一个食指指节、一个无名指指节和一个小指指节;其中,所述侧摆驱动组件包括:第二驱动组件,设置于所述手掌基板,与所述食指指节连接,被配置为驱动所述食指指节转动,以实现所述食指指节的侧摆;第五连杆,所述第五连杆的第一端与所述食指指节可转动连接,所述第五连杆的第二端与所述无名指指节可转动连接;第六连杆,所述第六连杆的第一端与所述小指指节可转动连接,所述第六连杆的第二端与所述食指指节或所述无名指指节可转动连接。
16、在一些实施例中,所述第二驱动组件包括:第一侧摆驱动轮,与所述食指指节连接;侧摆驱动杆,所述侧摆驱动杆的第一端与所述第一侧摆驱动轮可转动连接;驱动源组件,包括相互连接的第二固定件和第二活动件,所述第二活动件在所述第二固定件的驱动下做直线往复运动,所述第二固定件与所述手掌基板连接,所述第二活动件与所述侧摆驱动杆的第二端可转动且可滑动连接。
17、在一些实施例中,所述第五连杆的第一端与所述食指指节绕第十六轴线可转动连接,所述第五连杆的第二端与所述无名指指节绕第十七轴线可转动连接;所述第六连杆的第一端与所述小指指节绕第十八轴线可转动连接,所述第六连杆的第二端与所述无名指指节绕第十九轴线可转动连接;其中,所述第四轴线、所述第十六轴线、所述第十七轴线、所述第十八轴线和所述第十九轴线均平行;其中,在与所述第四轴线垂直的平面上,所述食指指节对应的所述侧摆组件与所述手掌基板的转动轴线、所述无名指指节对应的所述侧摆组件与所述手掌基板的转动轴线、所述小指指节对应的所述侧摆组件与所述手掌基板的转动轴线、所述第十六轴线、所述第十七轴线、所述第十八轴线和所述第十九轴线的正投影分别为a点、b点、c点、d点、e点、f点和g点,其中,a点和b点之间的第一连线与d点和e点之间的第二连线交叉,b点和c点之间的第三连线与f点和g点之间的第四连线不交叉。
18、第二方面,本技术的实施例提供了一种机器人,包括:主体;至少一个第一方面提及的灵巧手,与所述主体连接。
19、本技术实施例提供的一种灵巧手,包括手掌基板、掌骨驱动组件、掌指驱动组件、第一拇指指节、第二拇指指节、第一腱绳和第一腱绳驱动组件、多个侧摆组件、多个第一指节、多个指节组件、侧摆驱动组件、多个弯曲驱动组件、多条第二腱绳和多个第二腱绳驱动组件。利用掌骨驱动组件驱动掌指驱动组件绕第一轴线转动,实现第一拇指指节的对掌运动;利用掌指驱动组件驱动第一拇指指节绕第二轴线转动,实现第一拇指指节的第一弯曲运动;利用第一腱绳驱动组件驱动第一腱绳运动,从而使第一腱绳拉动第二拇指指节绕第三轴线转动,实现了第二拇指指节的第二弯曲运动;利用侧摆驱动组件驱动至少两个所述侧摆组件绕各自的所述第四轴线转动,实现了至少两个第一指节的侧摆联动;利用多个弯曲驱动组件分别驱动多个所述第一指节绕各自的所述第五轴线转动,实现了多个所述第一指节的第三弯曲运动;利用多个第二腱绳驱动组件分别驱动多条所述第二腱绳运动,以使多条所述第二腱绳分别拉动多个所述指节组件绕各自的所述第六轴线转动,实现了多个所述指节组件的第四弯曲运动。换句话说,本技术的灵巧手的第一拇指指节和第二拇指指节组成的灵巧手拇指具有一个对掌自由度和两个弯曲自由度,即3个主动自由度。一个第一指节和一个指节组件可以组成灵巧手食指、灵巧手中指、灵巧手无名指或灵巧手小指。灵巧手食指、灵巧手中指、灵巧手无名指或灵巧手小指可以具有侧摆自由度和至少两个弯曲自由度,即灵巧手食指、灵巧手中指、灵巧手无名指和灵巧手小指总共有至少8个主动弯曲自由度和1个主动侧摆自由度。因此,在灵巧手具有与人手一致的五根手指的情况下,本技术的灵巧手可以具有至少12个主动自由度,属于中高自由度灵巧手,灵巧性较高。
20、另外,所述手掌基板具有依次层叠设置的手心容纳空间、中间容纳空间和手背容纳空间;其中,所述掌骨驱动组件、所述掌指驱动组件和所述第一腱绳驱动组件在所述手心容纳空间呈单层排布;多个所述弯曲驱动组件在所述中间容纳空间呈单层排布;多个所述第二腱绳驱动组件和所述侧摆驱动组件在所述手背容纳空间呈单层排布,即以上所有的驱动组件在手掌基板上排列成三层,合理利用了手掌基板的空间,减小了灵巧手的尺寸,使灵巧手的尺寸更接近人手,提高了灵巧手的拟人性。
本文地址:https://www.jishuxx.com/zhuanli/20241021/320513.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
欠驱动柔性连续体机械臂
下一篇
返回列表