一种针对非对称执行器齿隙的视觉机械臂控制方法
- 国知局
- 2024-10-21 15:01:52
本发明涉及机械臂,特别是一种针对非对称执行器齿隙的视觉机械臂控制方法。
背景技术:
1、随着现代科技的发展,机器人领域的智能化控制技术得到了快速的推动以及发展。其中,基于图像的视觉伺服控制的机械臂由于其具有高泛用性以及强大的鲁棒性,是一种具有强应用价值的机器人控制方案。因此一直是工业界以及学术界的重点研究领域。
2、随着现代社会对机器人的需求不断增长,人们对机器人性能的要求也日益提高,因此机器人控制技术的研究备受关注。现有针对执行器齿隙的机器人控制方法中,主要针对的都是对称的执行器。在之前的研究中,已经成功实现了基于图像的视觉伺服控制机械臂的关节对称执行器未知齿隙的逆补偿。但往往现实中执行器都是非对称的,仅仅考虑到对称的关节执行器齿隙是不足的。在复杂多变的环境中执行高精度的控制任务时,未知的非对称齿隙往往会影响到系统的稳定性以及安全性。然而,以往针对对称执行器齿隙的控制补偿方案,对非对称执行器的不适用的,不使用非对称执行器齿隙的补偿方案或者在机械臂关节非对称执行器上使用对称执行器的补偿方案都可能直接导致系统失去稳定性,使得机械臂无法顺利完成控制任务,甚至进一步损坏机械臂,造成更多的损失。因此针对上述问题,本专利提出了一种针对非对称执行器补偿的视觉机械臂控制方法,旨在解决未知对称执行器齿隙对系统造成的不利影响,确保系统的稳态性能,实现视觉机械臂的在图像位置上追踪。
技术实现思路
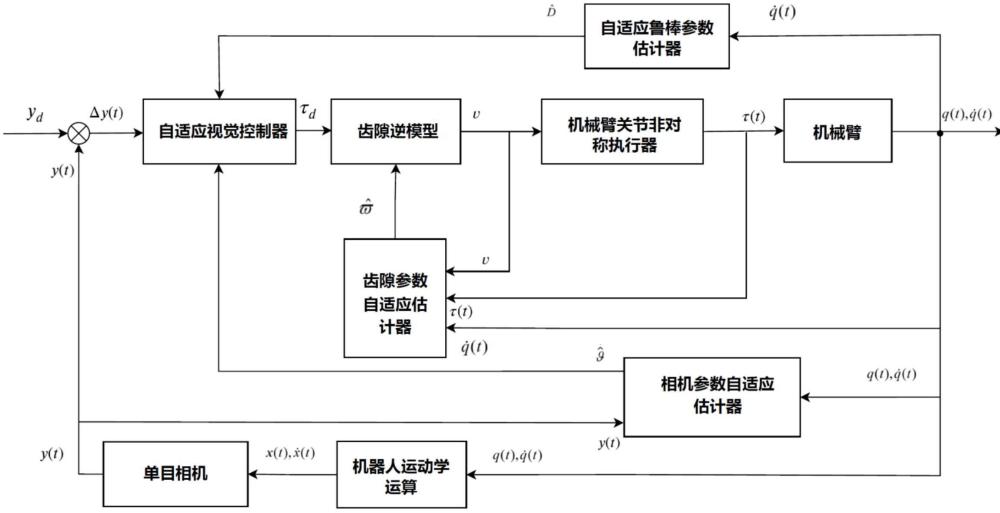
1、针对现有技术中存在的问题,本发明的目的在于提供一种针对非对称执行器齿隙的视觉机械臂控制方法,基于自适应控制策略,将其与非对称执行器齿隙的逆模型,开发了依靠于执行器输入输出,针对未知执行器齿隙的补偿技术,以及处理了非标定相机下的视觉伺服机械臂控制方法。利用参数化的方法,对未知的非对称执行器齿隙以及未知的单目相机的内外投影矩阵进行了参数处理,利用自适应估计方法,对执行器参数和单目相机的内外参数进行估计和补偿,保证了机械臂在闭环动力学控制中,通过机械臂的关节状态反馈以及非标定相机的视觉反馈,机械臂手部末端能够到达图像上的期望位置。该方法通过引入自适应在线更新参数估计值的方法,解决了非标定视觉伺服控制机械臂的非对称执行器存在的挑战。为视觉机械臂的高精度控制提供了新的思路以及实际应用的新方法。
2、为解决上述问题,本发明采用如下的技术方案
3、一种针对非对称执行器齿隙的视觉机械臂控制方法,其特征在于,包括以下步骤:
4、s1.依据机器人运动学方法,构建的坐标变换关系;
5、s2.依据透视投影原理,建立特征点投影关系;
6、s3.依据拉格朗日动力学方法,构建机械臂动力学模型;
7、s4.依据动力学方程,建立带有齿隙的非对称执行器动力学模型;
8、s5.依据执行器动力学模型,建立执行器的动力学逆模型;
9、s6.依据两个模型之间的误差,建立参数化误差以及未参数误差;
10、s7.依据参数化误差和未参数化误差建立新的机械臂动力学模型;
11、s8.依据带有执行器齿隙的机械臂动力学模型,设计带有自适应鲁棒补偿器的视觉伺服动力学控制器;
12、s9.依据带有执行器齿隙的机械臂动力学模型,构建相机参数的估计方法;
13、s10.依据带有执行器齿隙的机械臂动力学模型,构建逆模型自适应参数和鲁棒补偿器参数的估计方法。
14、依据机器人运动学方法,构建的坐标变换关系
15、
16、其中,用q(t)代表机械臂每个关节的角度,x(t)代表关节末端特征点的三维空间位置,对应地是关节的角速度,是特征点的空间速度,j是关节速度到特征点速度的雅可比映射矩阵。
17、依据透视投影原理,建立特征点投影关系
18、使用单目相机的透视投影模型
19、
20、其中,y(t)=(u(t) v(t) 1)t代表了特征点在图像上的投影坐标,对应的单位是像素;而
21、
22、是相机的外参数矩阵,r3×3是旋转矩阵,p3×1是平移向量;而
23、
24、则是相机对应的内参数矩阵,u0,v0是对应的相机中心,χ和α是图像平面两个轴的放缩因子,ζ是图像平面两个轴的夹角,cz(t)则是投影点在投影坐标系下相对于相机中心的深度,将内外参数整合可以得到
25、
26、m=ωt
27、并且可以知道,特征点相对于相机的深度信息可以写成
28、cz(t)=m3x(t)
29、对整合的投影模型求导,得到特征点的图像速度关系
30、
31、在非标定的相机中,由于参数的未知的,因此参数矩阵m是未知的,但是由于投影平面的位置可以是任意的,因此,为了使得参数矩阵有唯一解,我们将参数矩阵的最后一个元素固定为一个固定的值,并将其它的元素排列成一个向量
32、θ=(m11,m12,m13,...,m32,m33)t。
33、依据拉格朗日动力学方法,构建机械臂动力学模型:
34、
35、其中h(q(t))和是机械臂的惯性力矩阵和向心力科氏力矩阵,g(q(t))是机械臂受到的重力,τ是机械臂各个关节的力矩。
36、依据动力学方程,建立带有齿隙的非对称执行器动力学模型:
37、建立带有齿隙的非对称执行器输入输出动力学模型:
38、
39、其中v(t)和τ(t)是系统输入输出,ml和mr是执行器左右输出增益,bl和br是执行器的左右齿隙死区宽度,τ(t-)为输出时代表执行器保持了上一个时间的输出。
40、依据执行器动力学模型,建立执行器的动力学逆模型
41、
42、其中τs为逆模型的输入,和是一种自设定的光滑函数
43、
44、其中κ为自定义增益,并且可以证明,当κ的数值足够大的时候,逆模型与正模型的误差是有界的。
45、依据两个模型之间的误差,建立参数化误差以及未参数误差
46、假设非对称执行器的左右增益之比是已知的,并设m=mr,执行器逆模型可以线性化为以下形式
47、
48、其中参数部分
49、输入输出向量为
50、依据参数化误差和未参数化误差建立新的机械臂动力学模型
51、由于执行器参数是未知的,因此需要对其进行估计,用符号表示对未知参数的估计值,其估计值表示为
52、
53、因此期望的执行器输出表示为
54、
55、为了方便表示逆模型和正模型之间的误差,我们定义下面的参数误差符号
56、
57、因此补偿误差表示为
58、
59、其中,表示参数化误差,e(t)表示未参数化误差。当κ的数值足够大的时候,可以得到
60、
61、其中,是未参数化误差的上界。因此,建立带有执行器齿隙的机械臂动力学模型
62、
63、其中,e和表示各个关节的参数化误差和未参数化误差
64、
65、ψ=[ψ1,ψ2,ψ3,...,ψn]t
66、e=[e1,e2,e3,...,en]t。
67、依据带有执行器齿隙的机械臂动力学模型,设计带有自适应鲁棒补偿器的视觉伺服动力学控制器:
68、为使得机械臂的末端特征点到达图像上的期望位置,我们建立了基于图像像素的视觉反馈误差
69、δy(t)=y(t)-yd
70、根据机械臂的动力学模型,建立用于驱动机械臂到达图像期望未知的动力学控制器
71、
72、其中g(q)是实时的机械臂重力,k1和b是斜对称增益矩阵,j是雅可比映射矩阵,和是由对应的相机参数估计值估计值构成,τ0是构造的自适应鲁棒补偿器
73、
74、其中是对未参数化误差上界向量d=diag(d1,d2,...,dn)的自适应估计值,dn则是各个关节执行器的未参数误差上界,是根据关节角速度变化的符号函。
75、依据带有执行器齿隙的机械臂动力学模型,构建相机参数的估计方法,
76、通过将动力学控制器和带有执行器齿隙的机械臂动力学方程结合
77、
78、根据上式,建立带有相机参数估计误差的回归矩阵
79、
80、对当机械臂在运动的时候,具有以下的估计误差
81、
82、其中,w(x(tj),y(tj))是回归矩阵,令机械臂在离线做非直线运动,选取任意五个以上相互非共线的点,构建非标定相机的参数自适应更新方法
83、
84、其中,γ是自适应更新速率增益矩阵;
85、依据带有执行器齿隙的机械臂动力学模型,构建逆模型自适应参数和鲁棒补偿器参数的估计方法,
86、通过机械臂实时的状态反馈,我们将各个关节非对称执行器的逆模型参数的自适应律构建为如下形式
87、
88、其中yi为各个关节自适应估计增益矩阵。而针对未参数化误差上界,构建如下的自适应更新方法
89、
90、其中,ξ同样是自适应更新增益;
91、依据带有执行器齿隙的视觉机械臂动力学模型,选取李雅普诺夫函数:
92、用和表示和ψ的元素,选定如下的李雅普诺夫函数
93、
94、对闭环控制动力学方程进行标量化处理
95、
96、对相机参数的自适应律进行处理
97、
98、代入雅克比映射关系,得到特征点深度的速度
99、
100、进一步,建立以下关系
101、
102、对李雅普诺夫函数进行求导操作,并代入上述式子,可以得到
103、
104、选取部分项可以得到
105、
106、结合执行器参数自适应更新律和鲁棒参数更新率,进一步推导
107、
108、因此,可以推导得到
109、
110、根据上述不等式,可以得到系统的李雅普诺夫函数函数的有界性,当时间趋于无穷时,系统趋于稳定,且机械臂的关节角速度减少到零;
111、
112、当系统稳定后
113、
114、简化其中一部分可以得到
115、
116、进一步推导,可以得到
117、
118、以及
119、
120、两个条件合并可以得到
121、
122、本发明的有益效果
123、相比于现有技术,本发明的优点在于:
124、当视觉伺服机械臂的关节为带有齿隙的非对称执行器时,本发明能够保证机械臂的高精度控制性能。
125、本发明提出了一种可以在线更新非对称执行器齿隙逆模型参数的自适应算法,可以根据各个关节的实时状态调整逆模型的参数。
126、本发明提出了一种带有自适应鲁棒补偿的非标定视觉机械臂动力学控制器,保证了非标定视觉下,能够消除齿隙影响,使得系统误差收敛到零。
本文地址:https://www.jishuxx.com/zhuanli/20241021/320237.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表