-
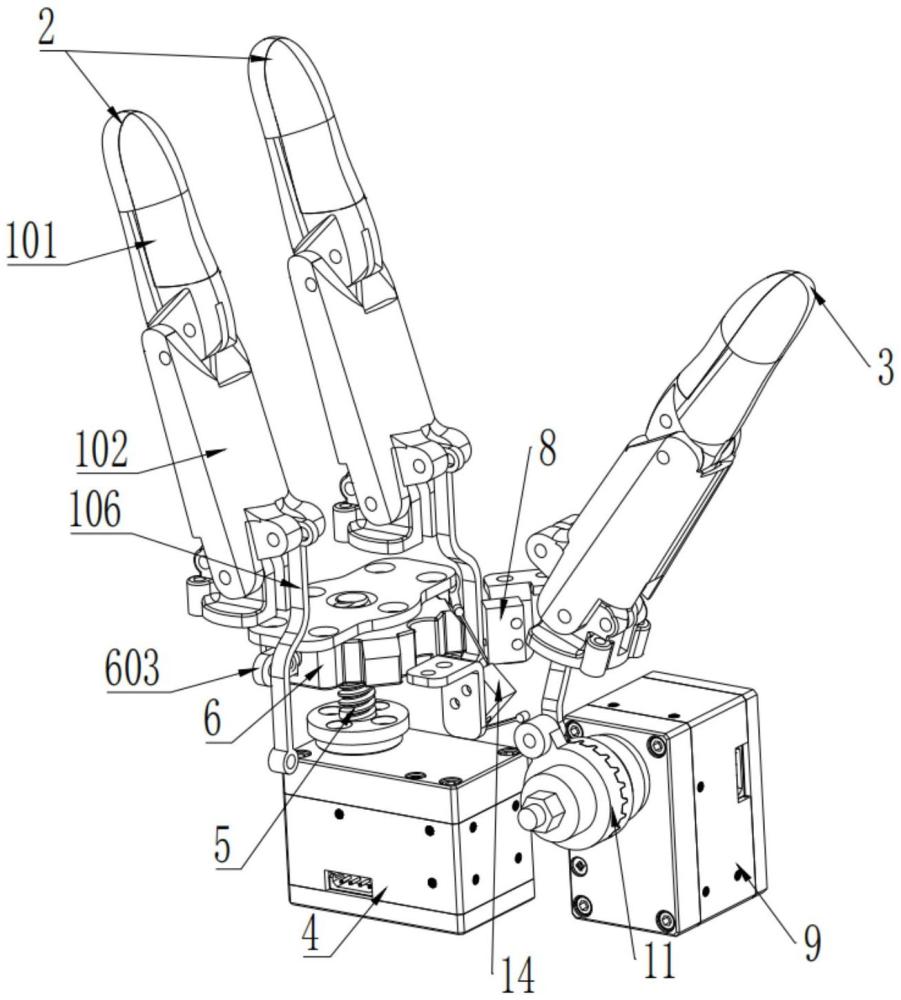
一种三指灵巧手的制作方法
本发明涉及机械手,尤其是涉及一种三指灵巧手。背景技术:1、随着社会的进步和人们生活节奏的加快,对于便捷、高效的家庭服务需求日益增长。传统的家政服务虽然能够满足部分需求,但存在着服务质量参差不齐、人员不......
-
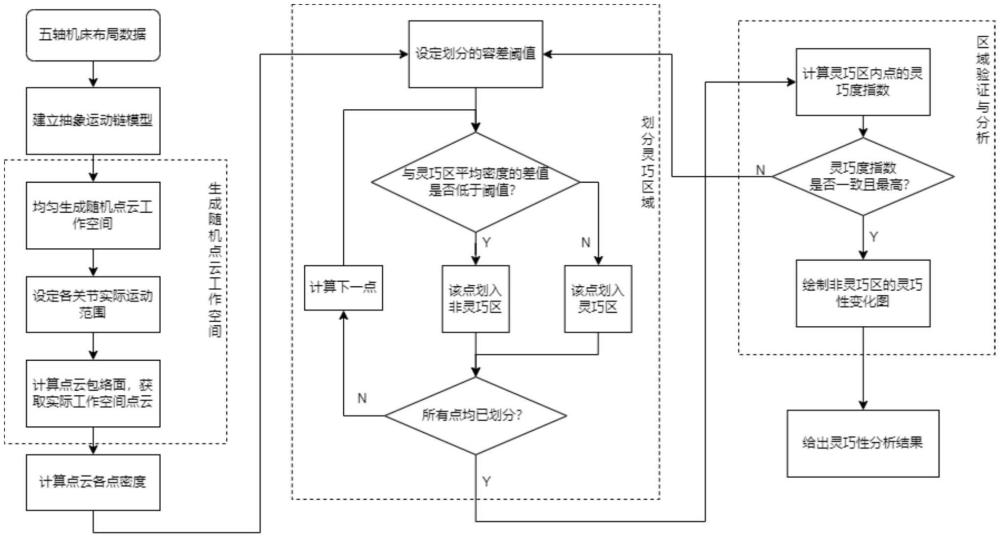
基于巧度指数的五轴数控机床工作空间灵巧性分析方法
本发明涉及五轴机床工作空间的灵巧性分析领域,尤其是涉及一种基于巧度指数的五轴数控机床工作空间灵巧性分析方法。背景技术:1、五轴机床的结构通常包含主旋转轴、副旋转轴以及三个移动轴,如公开号为cn1113......
-

一种用于便携灵巧焊机器人快速定位的定位装置的制作方法
本申请涉及焊接机器人领域,特别是涉及一种用于便携灵巧焊机器人快速定位的定位装置。背景技术:1、焊接机器人是从事焊接的工业机器人,焊接机器人焊接时,需要对焊接机器人或者工件进行固定,特别是一些大型设备不......
-
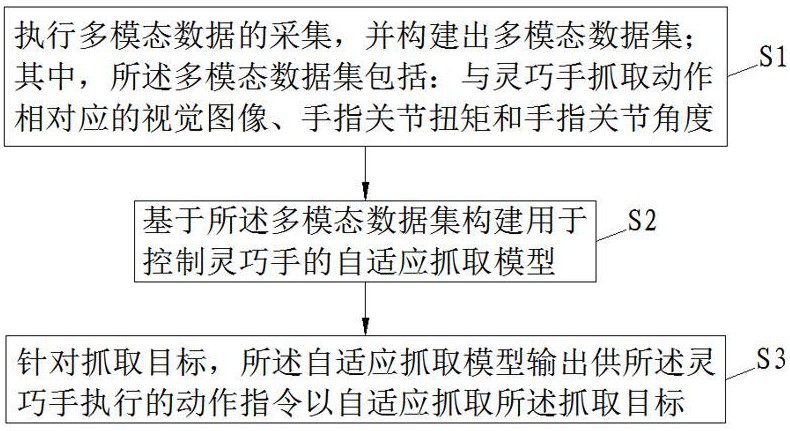
基于多模态融合模仿学习的灵巧手自适应抓取方法
本发明涉及灵巧手控制设计领域,尤其涉及一种基于多模态融合模仿学习的灵巧手自适应抓取方法。背景技术:1、仿人灵巧手具有极高的灵活性和类人结构特征,能够执行精细的操作,如工具处理和各种手部操作任务。在灵巧......
-
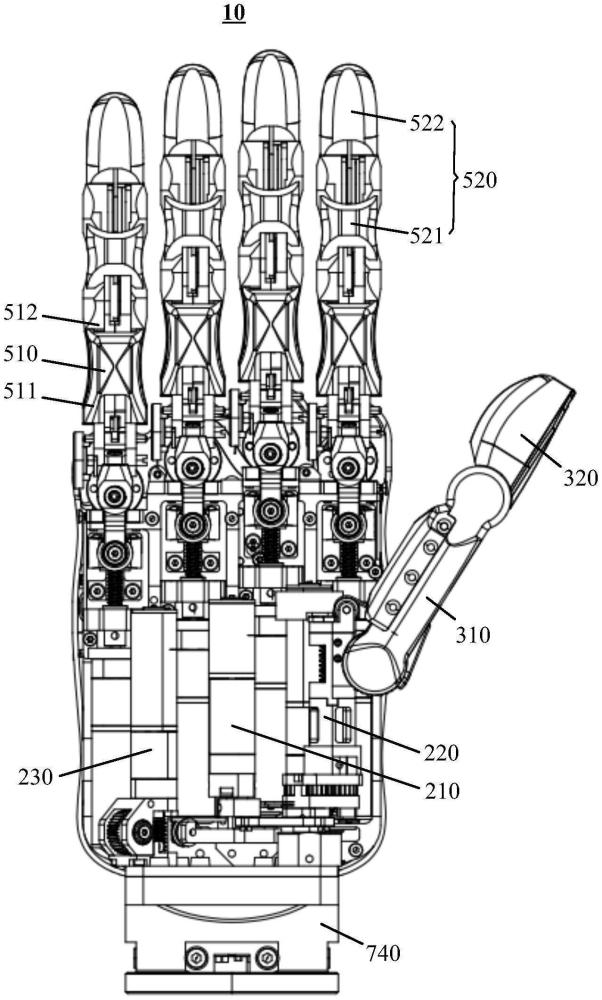
灵巧手和机器人的制作方法
本技术涉及机器人,具体涉及一种灵巧手和机器人。背景技术:1、人手具有不低于21个自由度,手指部分每个手指有4个自由度,大拇指有5个自由度,灵巧手的设计目标是从形态和功能上尽量拟人。目前灵巧手按自由度和......
-

机械拇指、灵巧手及人形机器人的制作方法
本技术涉及机器人,尤其涉及一种机械拇指、灵巧手及人形机器人。背景技术:1、机械手的机械拇指通常只能伸展、弯曲,仿人手程度较低,灵活度较低。机械拇指采用拉线驱动结构,由于拉线驱动结构较复杂,导致该机械拇......
-

灵巧手及人形机器人的制作方法
本技术涉及机器人,尤其涉及一种灵巧手及人形机器人。背景技术:1、灵巧手,作为人形机器人不可或缺的末端执行工具,其设计精妙地模仿了人类手部的功能与感知特性。为了驱动手指运动和采集各种感知信号,灵巧手内部......
-
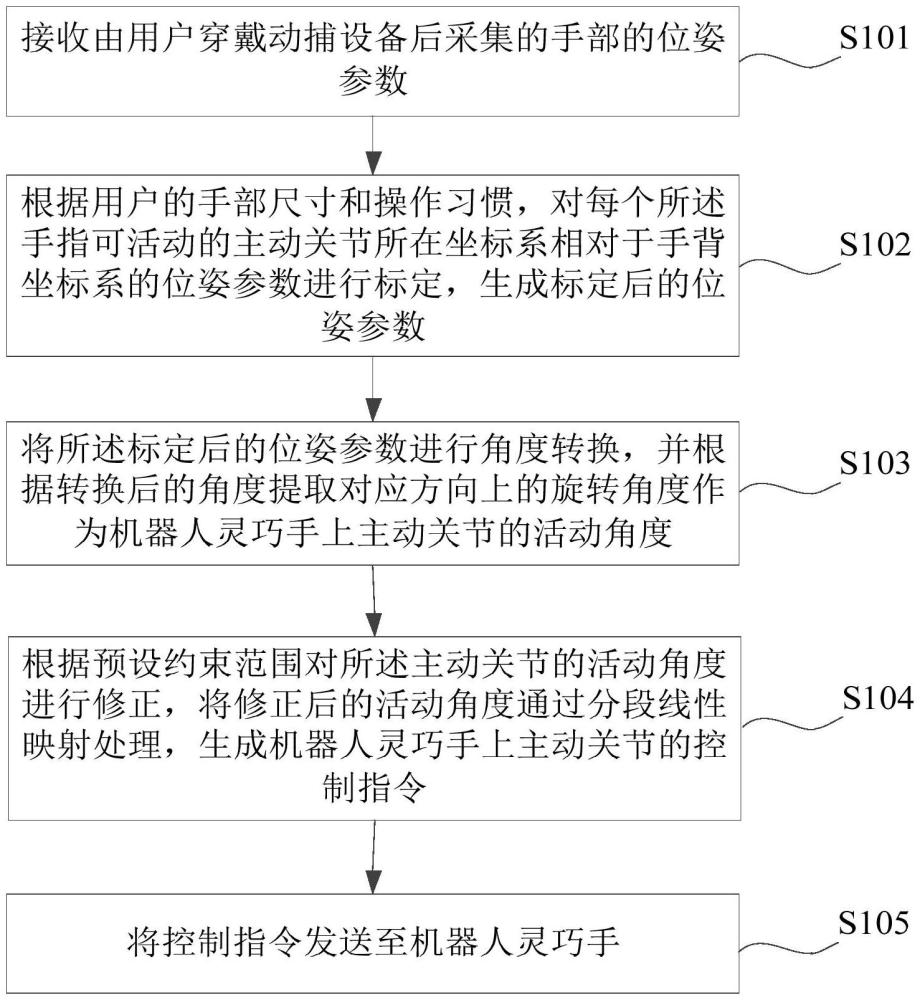
一种机器人灵巧手的遥操作控制方法、装置、系统及介质与流程
本发明涉及机器人遥操作领域,具体涉及一种机器人灵巧手的遥操作控制方法、装置、系统及介质。背景技术:1、遥操作是指:在远离机器或设备的地方,通过通信系统和控制界面,对机器人或设备进行远程监控和控制,使机......
-
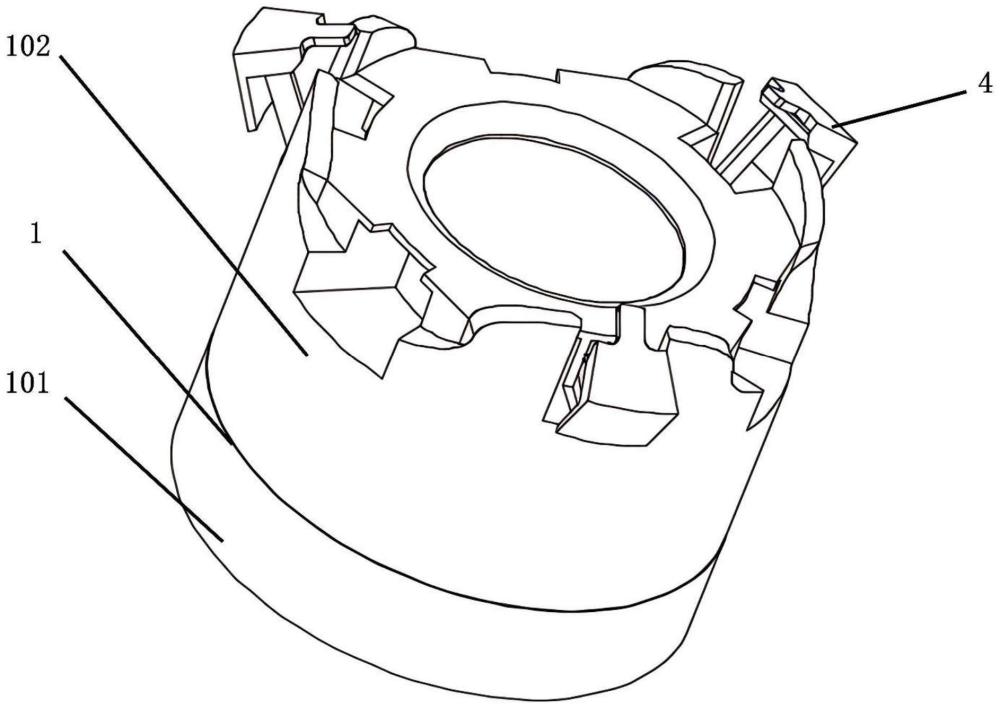
一种超灵巧在轨可更换模块机械接口
本发明涉及航天产品设计,特别涉及一种超灵巧在轨可更换模块机械接口。背景技术:1、在轨可更换模块机械接口需要在狭小的空间内实现高度可靠的机械连接,这对接口的设计提出了严格的要求。机械接口作为标准接口主体......
-
一种可拆解组合式灵巧胸针的制作方法
本技术涉及一种胸针,尤其涉及一种可拆解组合式灵巧胸针。背景技术:1、胸针又称胸花,是一种使用搭钩别在衣服上的饰品,也可认为是装饰性的别针。一般为金属质地,上嵌宝石、珐琅等。大多数胸针通常都采用一体式或......
-

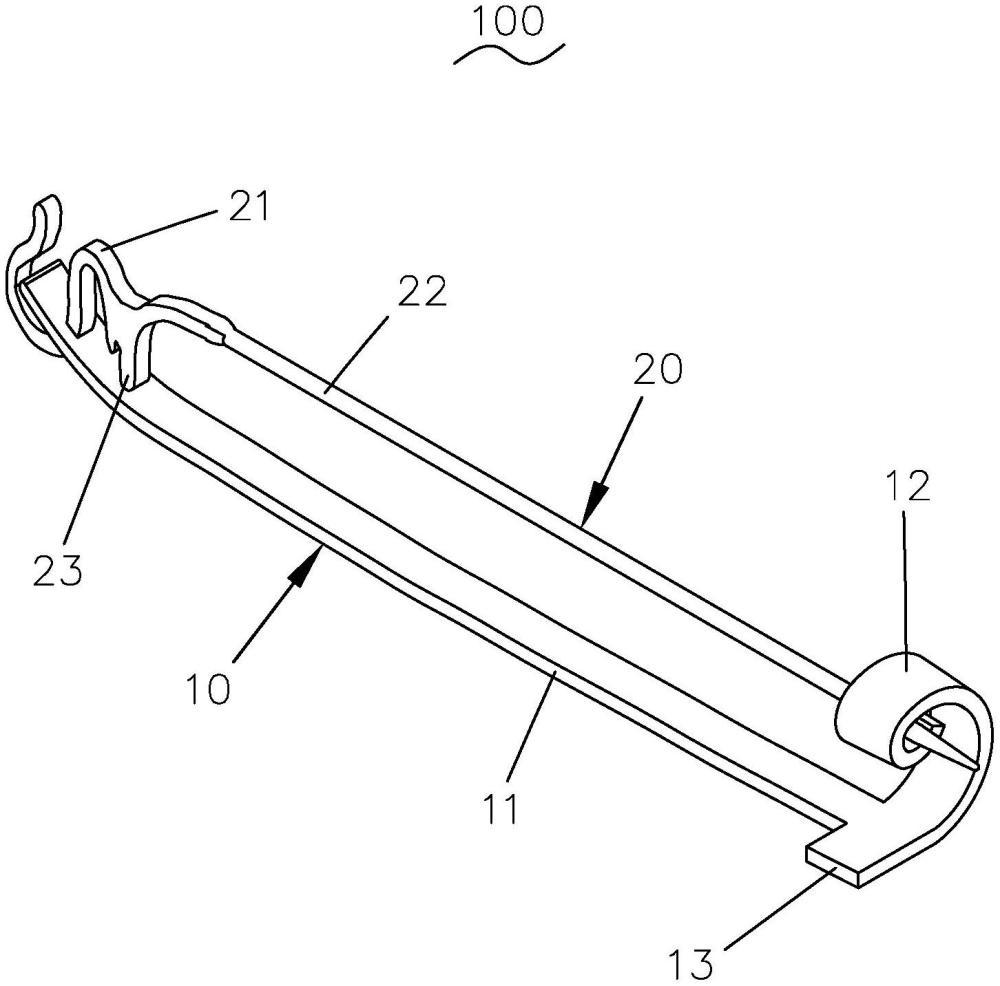
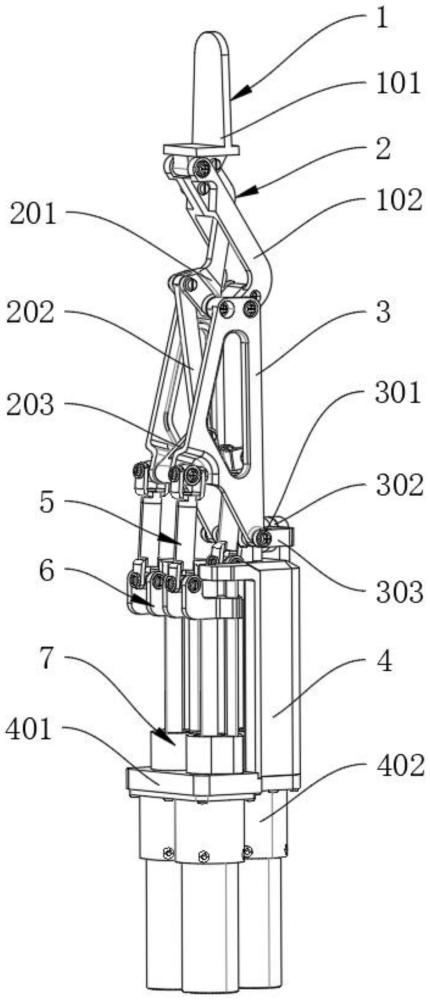
一种用于绳索牵引灵巧手的手指结构总成
本发明涉及机械结构,尤其协作机器人领域,具体涉及一种用于绳索牵引仿人灵巧手的手指结构总成。背景技术:1、灵巧手是机器人的重要组成部分,用来执行抓取和操作功能,作为机器人的末端执行装置,对机器人的性能有......
-
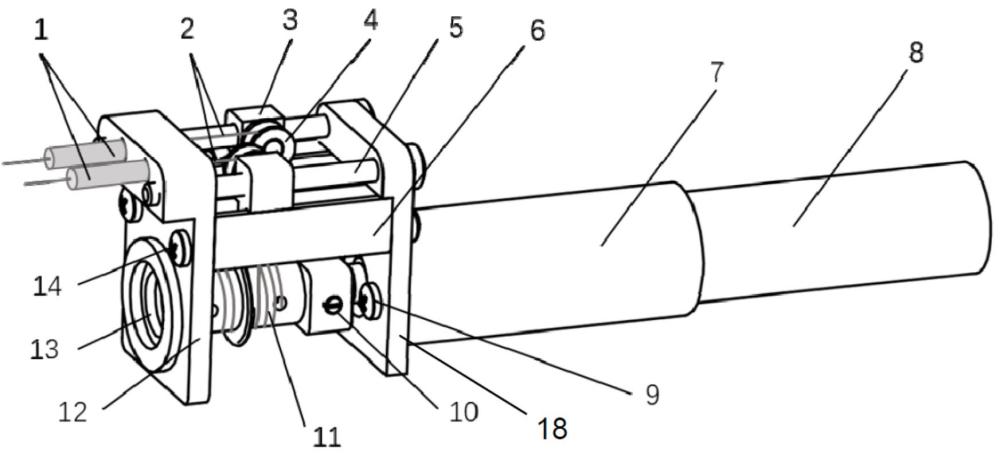
一种用于绳索牵引灵巧手的操控装置
本发明涉及机械结构,尤其协作机器人领域,具体涉及一种用于绳索牵引仿人灵巧手的绳索张紧和牵引的操控装置。背景技术:1、灵巧手是机器人的重要组成部分,用来执行抓取和操作功能,作为机器人的末端执行装置,对机......
-

灵巧手控制方法、装置、系统及电子设备与流程
本技术涉及机器人,特别涉及灵巧手控制方法、装置、系统及电子设备。背景技术:1、目前,基于深度学习的经验法能够对简单夹持器比如夹爪的抓取进行规划,以实现夹爪对目标对象的抓取,然而,这种抓取规划以及控制方......
-
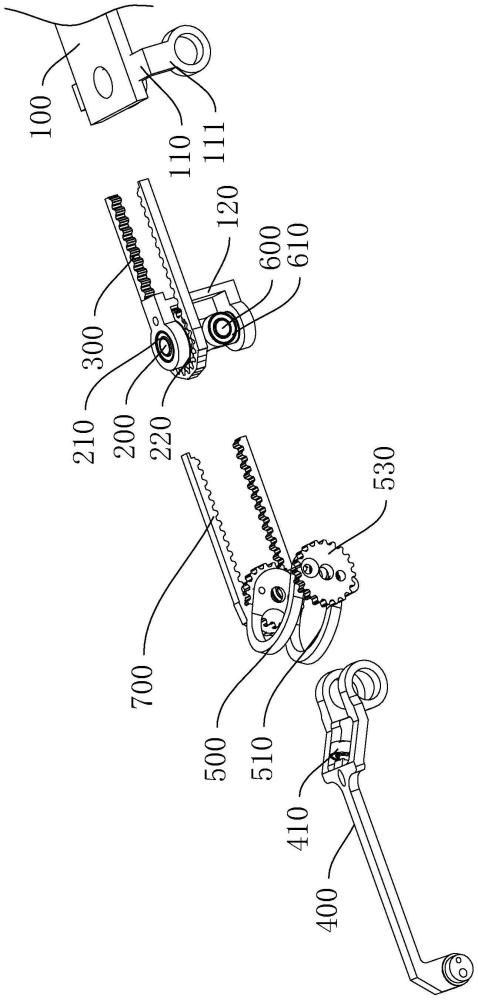
一种自由度机器人灵巧手指机构的制作方法
本发明属于机器人,具体涉及一种自由度机器人灵巧手指机构。背景技术:1、仿生机械手是一种模仿生物形态、结构和控制原理设计制造出的功能更集中、效率更高并具有生物特征的机械手。这种机械手的设计灵感来源于生物......
-
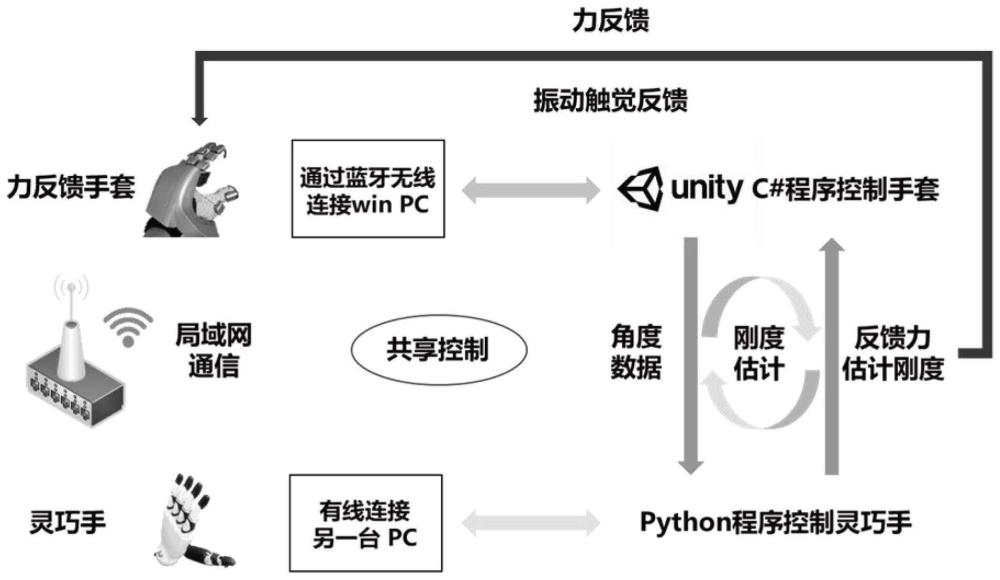
一种基于刚度估计的力反馈灵巧手遥操作共享控制方法与流程
本发明涉及一种基于刚度估计的力反馈灵巧手遥操作共享控制方法,属于机器人遥操作系统。背景技术:1、随着机器人技术的不断发展,在许多对人类不利的环境中执行任务时,机器人全自主化仍然不能保证任务安全、准确、......
-
一种灵巧手解耦关节的制作方法
本发明涉及机器人手指基关节,特别涉及一种灵巧手解耦关节。背景技术:1、对于人手的手掌和第一关节而言,有2个自由度,弯曲和左右摆动。目前主流的灵巧手,往往会简化或去掉左右摆动的自由度。使用线驱动可以很好......
技术新讯 > 灵巧 > 列表
 2024-11-21
2024-11-21精选技术
-

用于T梁转运的装置及方法与流程
2024-08-02 -

电流互感器的性能评估方法及系统与流程
2024-09-14 -

小数据传输失败报告的制作方法
2024-10-15 -

一种河道工程用河道清淤搅动装置的制作方法
2024-07-09 -

调控叶轮组的制作方法
2024-07-30 -

一种数据丢失情况下无人水面航行器的航向控制方法
2024-08-01 -

吊架及空铁交通系统的制作方法
2024-08-01 -

一种高低压气瓶组合的氮气推进系统的制作方法
2024-08-01 -

一种船体上层建筑分段建造工艺的制作方法
2024-08-01 -
电磁加热蒸汽发生器的制作方法
2024-08-01