跨介质无人机载具及无人机发射方法与流程
- 国知局
- 2024-10-21 15:14:48
本发明涉及跨介质无人机,尤其是一种跨介质无人机载具及无人机发射方法。
背景技术:
1、跨介质无人机能够实现从水下至空中的状态切换,因此同时具备水下隐蔽性和空中灵活性的优势。
2、现有的跨介质方式分为两类,一类是飞机直接从水下起飞,这种方式的优势在于无需增加额外组件,起飞过程简洁,但缺点在于机体结构需要防水设计且能耐一定水压,会额外增加结构重量和复杂程度,影响系统整体效能;另一类方式需要设计专门的无人机载具,其主要功能为提供防水耐压能力,实现水中稳定运动,并在到达水面后,采用弹射方式将飞机运送至空中,完成水空状态切换,这类方式的优势在于对于飞机改装少,通用性强,系统整体效能较高,其缺点为增加了弹射环节,增加了起飞流程复杂程度。
3、综合来看,目前第二类方式的应用较多,相应的无人机载具有较大的应用前景。现有公开的无人机载具方案多采用类似圆柱形浮筒构型设计,这种构型的局限性在于:
4、水面漂浮状态时,载具姿态单一,无法进行无人机弹射角度的调节,无法满足无人机在起飞姿态角下起飞的要求;并且载具易受海洋波浪力作用而摇摆乃至倾覆,难以满足飞机在恶劣海况下的起飞要求,因此限制了跨介质无人机的海洋环境适用性。
技术实现思路
1、本申请人针对上述现有生产技术中的缺点,提供一种跨介质无人机载具及无人机发射方法,从而实现载具姿态的调整,使无人机能够在起飞姿态角下起飞,提高载具在恶劣海况下的适应性。
2、本发明所采用的技术方案如下:
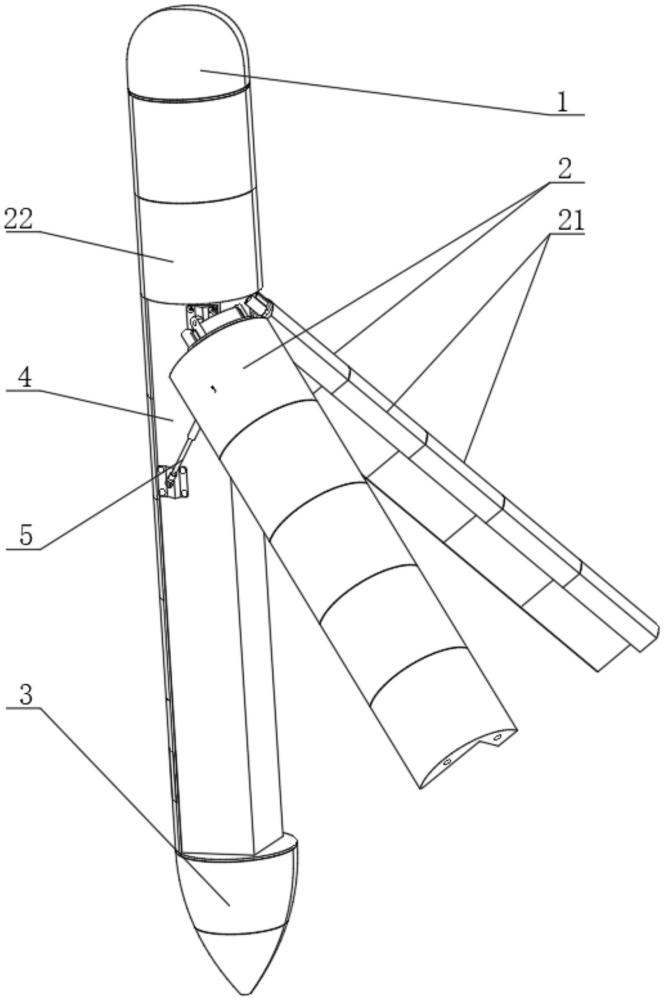
3、一种跨介质无人机载具,包括两端贯通的耐压管体和弹射装置,所述耐压管体用于容纳所述无人机,所述耐压管体的一端密封安装有头罩,所述耐压管体的另一端密封安装有尾舱,所述耐压管体的外部设置有翅片和作动器,所述尾舱内安装有控制装置;
4、所述翅片的一端与所述耐压管体的外部铰接,所述翅片与所述作动器的输出端连接,所述作动器用于驱动所述翅片摆动,进而改变所述翅片的轴线与所述耐压管体的轴线之间的夹角;
5、当所述夹角为零时,所述翅片、耐压管体、头罩和尾舱整体呈流线旋成体;
6、当所述夹角为预设角度且所述载具浮于水面时,所述耐压管体的轴线与所述水平面的夹角为所述无人机的起飞姿态角。
7、作为上述技术方案的进一步改进:
8、所述翅片与所述耐压管体的铰接位置位于所述头罩的一侧,所述翅片的数量为两件,所述翅片的铰接位置位于所述耐压管体的横截面虚拟直径的同侧且距离所述耐压管体的横截面中心的距离相等。
9、所述载具的浮心偏离所述载具的重心,所述载具的重心位于所述浮心的下方。
10、所述耐压管体的外部包裹有第一固定浮力材料,所述翅片上设置有活动浮力材料。
11、所述作动器为伸缩缸,所述作动器的一端与所述耐压管体铰接,所述作动器的另一端与所述翅片的中部铰接。
12、所述控制装置包括姿态控制模块,所述姿态控制模块包括角度检测单元以及角度控制单元;
13、所述角度检测单元用于检测所述耐压管体的轴线与水平面的实时夹角,所述角度控制单元根据所述实时夹角与所述起飞姿态角的差异控制所述作动器,使所述实时夹角变化为起飞姿态角。
14、所述头罩与所述耐压管体通过密封圈连接。
15、所述弹射装置包括活塞和气体发生器;
16、所述活塞的外周为环向连续的密封面,所述密封面与所述耐压管体的内壁密封且滑动连接;
17、所述尾舱内安装有所述气体发生器,所述气体发生器的喷射口穿过所述尾舱位于所述耐压管体内,所述喷射口与所述活塞对应,所述气体发生器与所述控制装置连接。
18、所述耐压管体内还设置有节流罩,所述节流罩位于所述喷射口外部,所述节流罩为与所述耐压管体同心的盲管结构,所述耐压管体的开口一端与所述耐压管体固定且密封连接,所述节流罩的侧壁设置有多个均布的通气孔。
19、一种无人机发射方法,包括以下步骤:
20、在水下将载具释放,载具携带所述无人机自由上浮;
21、所述载具到达水面后,所述载具上的翅片展开,所述翅片浮于水面;
22、调节所述翅片的轴线与所述耐压管体的轴线之间的夹角为预设角度,使所述耐压管体的轴线与水平面的夹角为所述无人机的起飞姿态角;
23、所述载具接收到起飞指令后,所述载具的控制装置启动,所述无人机从耐压管体中弹射而出升空,所述头罩在所述无人机的冲击下脱离所述耐压管体;
24、无人机发射完毕后回收所述载具。
25、本发明的有益效果如下:
26、本发明结构紧凑、合理,操作方便,通过在载具的耐压管体上设置了可以展开和收拢的翅片,在载具上浮于水面后展开翅片,改变载具浮心的位置,进而改变耐压管体的轴线与水平面的夹角,从而实现载具姿态的调整,满足无人机的起飞姿态角,展开的翅片增加了载具的重心与浮心距离、转动惯量和水阻尼,从而提高了载具的稳定性与耐波性,提高载具在恶劣海况下的适应性。
27、同时,本发明还存在如下优势:
28、(1)翅片的数量为两片,两片翅片均相对耐压管体张开,同时两片翅片在水平方向也相对张开,使得载具的重心与浮心距离、转动惯量和水阻尼大幅增加,从而进一步提高了载具的稳定性与耐波性,提高载具在恶劣海况下的适应性。
29、(2)当水面存在波浪时,姿态控制模块实时控制作动器驱动翅片改变与耐压管体的夹角,对两个相对张开的翅片的展开角度调节,调整载具俯仰方向姿态角以及滚转方向姿态角,实现实时姿态调节,有效改善载具在水面弹射过程中的运动控制的稳定性,进一步提高载具在恶劣海况下的适应性。
技术特征:1.一种跨介质无人机载具,其特征在于:包括两端贯通的耐压管体(4)和弹射装置,所述耐压管体(4)用于容纳所述无人机,所述耐压管体(4)的一端密封安装有头罩(1),所述耐压管体(4)的另一端密封安装有尾舱(3),所述耐压管体(4)的外部设置有翅片(2)和作动器(5),所述尾舱(3)内安装有控制装置(8);
2.如权利要求1所述的跨介质无人机载具,其特征在于:所述翅片(2)与所述耐压管体(4)的铰接位置位于所述头罩(1)的一侧,所述翅片(2)的数量为两件,所述翅片(2)的铰接位置位于所述耐压管体(4)的横截面虚拟直径的同侧且距离所述耐压管体(4)的横截面中心的距离相等。
3.如权利要求2所述的跨介质无人机载具,其特征在于:所述载具的浮心偏离所述载具的重心,所述载具的重心位于所述浮心的下方。
4.如权利要求1所述的跨介质无人机载具,其特征在于:所述耐压管体(4)的外部包裹有第一固定浮力材料(41),所述翅片(2)上设置有活动浮力材料(21)。
5.如权利要求1所述的跨介质无人机载具,其特征在于:所述作动器(5)为伸缩缸,所述作动器(5)的一端与所述耐压管体(4)铰接,所述作动器(5)的另一端与所述翅片(2)的中部铰接。
6.如权利要求1所述的跨介质无人机载具,其特征在于:所述控制装置(8)包括姿态控制模块,所述姿态控制模块包括角度检测单元以及角度控制单元;
7.如权利要求1所述的跨介质无人机载具,其特征在于:所述头罩(1)与所述耐压管体(4)通过密封圈连接。
8.如权利要求1所述的跨介质无人机载具,其特征在于:所述弹射装置包括活塞(6)和气体发生器(7);
9.如权利要求8所述的跨介质无人机载具,其特征在于:所述耐压管体(4)内还设置有节流罩(9),所述节流罩(9)位于所述喷射口(71)外部,所述节流罩(9)为与所述耐压管体(4)同心的盲管结构,所述耐压管体(4)的开口一端与所述耐压管体(4)固定且密封连接,所述节流罩(9)的侧壁设置有多个均布的通气孔(91)。
10.一种无人机发射方法,其特征在于:包括以下步骤:
技术总结本发明涉及一种跨介质无人机载具及无人机发射方法,包括两端贯通的耐压管体和弹射装置,耐压管体用于容纳无人机,耐压管体的一端密封安装有头罩,耐压管体的另一端密封安装有尾舱,耐压管体的外部设置有翅片和作动器,尾舱内安装有控制装置;翅片的一端与耐压管体的外部铰接,翅片与作动器的输出端连接,作动器用于驱动翅片摆动,进而改变翅片的轴线与耐压管体的轴线之间的夹角;当夹角为零时,翅片、耐压管体、头罩和尾舱整体呈流线旋成体;当夹角为预设角度且载具浮于水面时,耐压管体的轴线与水平面的夹角为无人机的起飞姿态角,从而实现载具姿态的调整,使无人机能够在姿态角下起飞,提高载具在恶劣海况下的适应性。技术研发人员:陈佳慧,凌畅,张哲,许统华,李博受保护的技术使用者:中国船舶科学研究中心技术研发日:技术公布日:2024/10/17本文地址:https://www.jishuxx.com/zhuanli/20241021/321010.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表