一种无人机大载重抛投装置的制作方法
- 国知局
- 2024-10-21 15:13:40
本发明涉及无人机,具体为一种无人机大载重抛投装置。
背景技术:
1、无人机抛投中,目前主流的是无人机搭载各种抛投物资,穿越各种复杂地形和恶劣环境,到达抛投地点后打开抛投箱进行低空抛投,作业效率和安全性得到很大的提高。
2、如公开号为cn218751386u的一种大载重无人机救援抛投结构,该抛投结构包括设置在大载重无人机本体下端的装载箱,所述装载箱通过若干个吊杆与大载重无人机本体连接固定,所述装载箱内部设有装载腔,所述装载腔下端阵列分布有若干个下坠口,每个下坠口所在的装载腔内部都设有一个用于对灭火球位置进行限定的辅助定位板,所述装载箱下端设有若干个与下坠口相对应用于封堵其的封堵机构;针对现有装置只能一次抛投的弊端进行设计,实现了单次航线多次抛投作业,可以满足救援操作的多个点位的抛投,提高了灭火救援效果,实用性强,但是,装置的抛投角度单一,仅便于竖直向下抛投,在应对火灾救援时,由于火势过大导致空气中的分子运动加快,分子之间的间隔变大,最终导致空气的密度减少,使得无人机不便停稳,此时竖直抛投较为不便,会影响抛投效果,使用时存在局限性。
3、所以我们提出了一种无人机大载重抛投装置,以便于解决上述提出的问题。
技术实现思路
1、本发明的目的在于提供一种无人机大载重抛投装置,以解决装置的抛投角度单一,仅便于竖直向下抛投,在特殊情况下,竖直抛投较为不便,会影响无人机的抛投效果,存在局限性的问题。
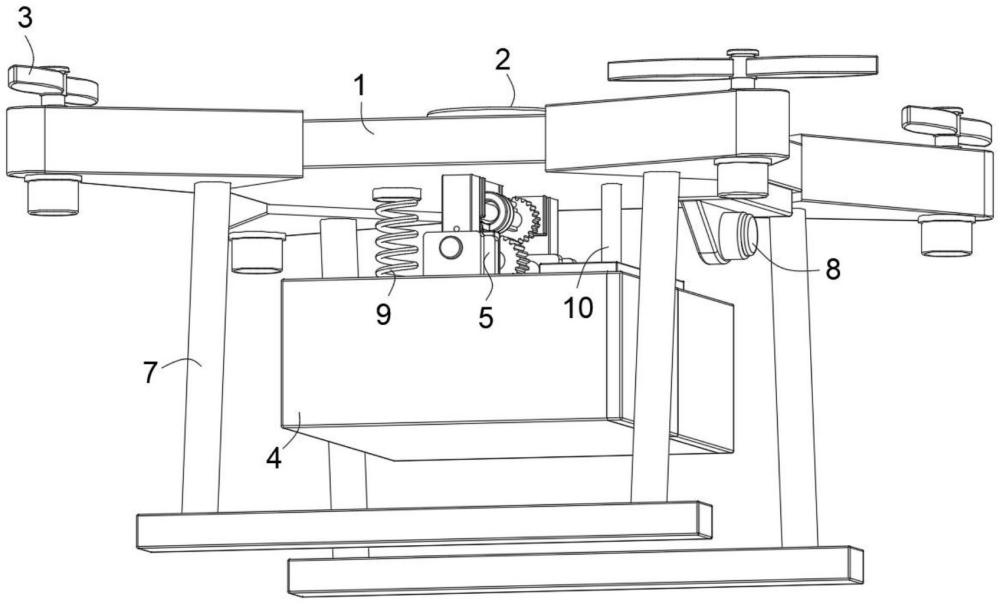
2、为实现上述目的,本发明提供如下技术方案:一种无人机大载重抛投装置,包括无人机主体、控制单元和抛投物,所述无人机主体的四周固定安装有旋翼,所述无人机主体的下方安装有负载箱,所述无人机主体的底部对称固定有支撑架;
3、还包括:
4、调节组件,设置在负载箱的顶部,所述负载箱的内部设置有抛投组件,所述无人机主体的底部一侧固定安装有摄像头,所述负载箱和无人机主体之间连接有弹簧二,所述无人机主体的底部固定连接有阻挡板;
5、所述调节组件包括对称设置的固定杆,所述负载箱的顶部对称固定有固定板,两个所述固定杆的下部转动连接有横杆,所述固定板与横杆固定连接,所述横杆的中部固定连接有从齿轮,所述无人机主体的底部对称固定有安装板,一侧所述安装板的内侧固定安装有伺服电机,所述伺服电机的输出端固定连接有转轴;
6、所述转轴的外侧套接有主齿轮,所述转轴的外部固定连接有限位条,所述主齿轮与限位条滑动连接,所述转轴远离伺服电机的一端固定连接有丝杆,所述丝杆的外侧套接有螺纹套,所述主齿轮靠近螺纹套的一侧固定连接有转杆,所述螺纹套靠近主齿轮的一侧开设有转槽,所述转杆与转槽滑动连接;
7、所述螺纹套远离主齿轮的一侧固定连接有抵接块,所述横杆的外侧固定连接有辅助块,所述辅助块的内部滑动连接有滑动杆,所述滑动杆的顶部固定连接有抵接杆,所述抵接杆的一侧连接有弹簧一;
8、所述抛投组件包括对称设置的箱门,所述箱门与负载箱相贴合,所述负载箱的内部一侧对称安装有电动推杆,所述电动推杆的输出端与箱门的固定连接,所述负载箱的内部固定安装有直线导轨,所述直线导轨的输出端固定连接有推动块。
9、优选的,所述固定杆的顶部与无人机主体的底部固定连接,所述限位条为上下对称设置,所述丝杆的一端与另一侧所述安装板转动连接。
10、通过采用上述技术方案,设置有调节组件,当滑动杆从辅助块中完全脱离时,主齿轮与从齿轮开始接触啮合,解除辅助块和横杆的限位,主齿轮再转动会带动从齿轮转动,从齿轮转动会带动横杆和固定板转动,固定板带动负载箱转动,便于负载箱调节抛投角度,适应不同情况下抛投,提高了使用便捷性。
11、优选的,所述螺纹套的顶部固定连接有限位块,所述无人机主体的底部开设有限位槽,所述限位块位于限位槽的内部,所述限位块与限位槽滑动连接。
12、通过采用上述技术方案,转轴带动主齿轮转动,限位块对螺纹套限位,且不影响主齿轮的滑动。
13、优选的,所述转槽为台阶槽,所述转槽为环形设置,所述转杆的一端固定有防脱块,所述防脱块位于转槽的内部。
14、通过采用上述技术方案,螺纹套通过转杆带动主齿轮移动,使得主齿轮既可移动,又可正常转动。
15、优选的,所述抵接块为环形设置,一侧所述固定杆的内部开设有滑槽,所述滑动杆与滑槽滑动连接,所述抵接杆与抵接块相抵接。
16、通过采用上述技术方案,螺纹套带动抵接块挤压抵接杆,抵接杆带动滑动杆从辅助块中滑出,抵接杆压缩弹簧一,当滑动杆从辅助块中完全脱离时,主齿轮与从齿轮开始接触啮合,解除辅助块和横杆的限位,便于负载箱后续的角度转动调节。
17、优选的,所述抛投物的一侧连接有吸附板,所述负载箱的内底面固定连接有安装块,所述安装块与吸附板相吸附,所述吸附板的一侧连接有套环。
18、通过采用上述技术方案,抛投物通过吸附板与安装块吸附,且通过挂钩勾住套环固定。
19、优选的,所述安装块的一侧安装有挂钩,所述挂钩与安装块转动连接,所述套环与挂钩适配连接。
20、通过采用上述技术方案,直线导轨带动推动块直线运动,推动块移动到挂钩的位置时,推动块推动挂钩,挂钩转动并解除对套环的勾连。
21、优选的,所述安装块为均匀设置,所述安装块等距离设置有多个,所述安装块不少于三个。
22、通过采用上述技术方案,多个设置的安装块,便于对多个抛投物辅助固定。
23、优选的,所述负载箱的内侧对称固定有斜块,所述斜块位于电动推杆和抛投物之间,所述斜块靠近抛投物的一侧安装有导轮,所述导轮为等距离均匀设置。
24、通过采用上述技术方案,斜块和其上的导轮辅助抛投物的滑动,起到导向作用。
25、与现有技术相比,本发明的有益效果是:设置有调节组件,当滑动杆从辅助块中完全脱离时,主齿轮与从齿轮开始接触啮合,解除辅助块和横杆的限位,主齿轮再转动会带动从齿轮转动,从齿轮转动会带动横杆和固定板转动,固定板带动负载箱转动,便于负载箱调节抛投角度,适应不同情况下抛投,提高了使用便捷性;
26、1、设置有调节组件,操作人员通过控制设备控制无人机主体飞行到抛投位置,通过启动伺服电机,伺服电机带动转轴和丝杆转动,转轴带动主齿轮转动,限位块对螺纹套限位,且不影响主齿轮的滑动,丝杆转动使得螺纹套左移,螺纹套通过转杆带动主齿轮移动,螺纹套带动抵接块挤压抵接杆,抵接杆带动滑动杆从辅助块中滑出,抵接杆压缩弹簧一,当滑动杆从辅助块中完全脱离时,主齿轮与从齿轮开始接触啮合,解除辅助块和横杆的限位,此时伺服电机继续转动,主齿轮会带动从齿轮转动,螺纹套继续移动一小段距离,不影响主齿轮与从齿轮的啮合,从齿轮转动会带动横杆和固定板转动,固定板带动负载箱转动,负载箱转动压缩弹簧二,阻挡板用于对负载箱复位时阻挡限位,从而实现负载箱调节抛投角度,适应不同情况下抛投,提高了使用便捷性,解决了装置的抛投角度单一,仅便于竖直向下抛投,在特殊情况下,竖直抛投较为不便,会影响无人机的抛投效果,存在局限性的问题;
27、2、设置有抛投组件,抛投物通过吸附板与安装块吸附,且通过挂钩勾住套环固定,在调节角度后,通过启动两侧的电动推杆,电动推杆收缩带动两个箱门打开,启动直线导轨,直线导轨带动推动块直线运动,推动块移动到挂钩的位置时,推动块推动挂钩,挂钩转动并解除对套环的勾连,抛投物倾斜受自重使得吸附板与安装块分离,抛投物向外滑出,斜块和其上的导轮辅助抛投物的滑动,使得抛投物滑出负载箱完成抛投操作,使用时更加方便。
本文地址:https://www.jishuxx.com/zhuanli/20241021/320934.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。