一种天基高可靠宽动态范围空间碎片捕获与跟踪方法与流程
- 国知局
- 2024-10-21 15:13:37
本发明涉及一种天基高可靠宽动态范围空间碎片捕获与跟踪方法,属于空间感知防护领域。
背景技术:
1、随着在轨航天器数量的增多,由于航天器撞击、解体等带来的碎片数量呈快速上升趋势。碎片的监测和防护成为当前航天任务的迫切需求。传统的碎片目标监测多为地面观测或天基观测、地面处理的方式,时效性有滞后,且无法全天时全天候覆盖。天基光学敏感器观测成像条件较好,已成为当前空间碎片自主监测的热点。
2、目前天基光学空间碎片捕获与跟踪方法常用的有掩膜法、叠加法、帧间差分法、恒星识别法等。掩模法准确率较低,叠加法动态范围较窄,帧间差分法计算量较大,恒星匹配法计算方法成熟、算法时间和空间复杂度稳定。现有技术在完成空间碎片捕获与跟踪时有的质心定位精度不够,更新率较低,有的计算复杂度过高;同时容易受到光学系统和探测器噪声的限制,从而导致目标探测的动态范围较窄,缺乏空间碎片探测的稳定性。
技术实现思路
1、本发明的技术解决问题是:克服现有技术的不足,提供了一种天基高可靠宽动态范围空间碎片捕获与跟踪方法,基于恒星与目标的不同运动特性对像点进行区分,并通过长周期计算提高信噪比和动态范围,增强了目标自主捕获与跟踪的能力。
2、本发明的技术解决方案是:一种天基高可靠宽动态范围空间碎片捕获与跟踪方法,包括:
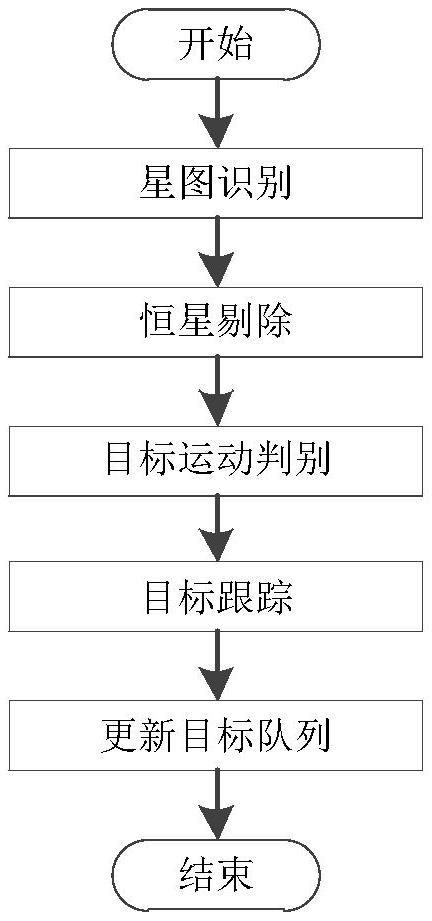
3、步骤1.天基光学敏感器获取恒星和目标叠加的多帧图像,利用三角形匹配法识别恒星的像点,并将该恒星像点从图像中剔除;
4、步骤2.根据星表信息,查找三角形匹配法未识别的恒星并从图像中剔除对应的像点;
5、步骤3.剔除恒星像点后剩余的像点被放入疑似目标队列,根据目标速度不同,分为快速疑似目标队列和慢速疑似目标队列;
6、步骤4.对疑似目标像点进行运动规律判别,保留目标的赤经、赤纬符合运动规律的像点,对目标赤经、赤纬与时间关系的参数进行拟合;
7、步骤5.拍摄一帧新的图像,将图像时间带入赤经、赤纬的拟合式中,获得目标在图像中的预测位置;
8、步骤6.在新拍摄图像中目标的预测位置附近通过窗口方式提取像点,若提取到多个像点,将像点的赤经、赤纬与目标在图像中的预测位置进行比较,选择置信度最高的像点作为当前帧目标点;
9、步骤7.根据新拍摄图像的惯性姿态,计算目标像点的赤经、赤纬,并按照先入先出的原则,代替疑似目标队列中的最早的数据,重新对目标赤经、赤纬与时间关系的参数进行拟合;
10、步骤8.重复步骤5-步骤7,对下一帧图像进行目标位置的预测及跟踪。
11、优选的,步骤1中识别恒星的像点的方法具体为:
12、计算观测星两两之间的角距,通过预先存储的导航星库角距查找与像点角距相近的值,并通过三角形匹配识别方法进行恒星识别。
13、优选的,步骤2中查找三角形匹配法未识别的恒星并从图像中剔除对应的像点,具体为:
14、首先将像点i在天基光学敏感器本体系下的单位矢量转换到惯性坐标系下,将像点i在惯性坐标系下的矢量与星表中导航星在惯性空间中的矢量叉乘后得到像点i与导航星角距,若像点i与导航星角距小于恒星判别阈值,则认为像点i为恒星,将其剔除,否则保留该像点;
15、进一步将任意两帧中未被剔除的两个像点在惯性系中的角距与多帧标记阈值进行比较,若任意两帧中未被剔除的两个像点在惯性系中的角距小于多帧标记阈值的点标记为恒星并剔除剩余的恒星。
16、优选的,步骤3中剔除恒星像点后剩余的像点被放入疑似目标队列,根据目标速度不同,分为快速疑似目标队列和慢速疑似目标队列,其中:
17、快速疑似目标队列中像点所在图像的帧间隔等于曝光帧周期;
18、慢速疑似目标队列中像点所在图像的帧间隔为角速度最小的目标与恒星区分所需的最短时间,具体计算方法为:
19、设慢速疑似队列中像点所在图像的帧间隔为δt,目标运动角速度下限为ωl,多帧标记阈值为θt,探测噪声为θn,则慢速队列中像点所在图像的帧间隔为
20、优选的,步骤4中对疑似目标像点进行运动规律判别,保留符合目标运动规律的像点,具体为:
21、(1)首先通过相邻两帧对应像点的角距和时间差,计算出目标像点的帧间角速度为ω1,ω2,…,ωn-1:
22、如果ω1,ω2,…,ωn-1符合预设的目标角速度阈值区间[ωl,ωu],则对目标进行进一步运动判别;
23、如果ω1,ω2,…,ωn-1不符合设定的目标角速度阈值区间,则舍弃整个序列目标像点;
24、(2)设目标参数队列相对于首帧的时间为t1,t2,…,tn,赤经和赤纬分别为α1,α2,…,αn及δ1,δ2,…,δn,在观测时间段内,赤经和时间的关系为:
25、αj=kαtj+bα,
26、赤纬和时间的关系为:
27、δj=kδtj+bδ,此处1≤j≤n;
28、使用赤经和时间进行拟合,求出表征赤经和时间关系的参数kα、bα,以及赤经拟合决定系数赤经拟合标准差同理拟合赤纬和时间关系的参数kδ、bδ、以及赤纬拟合决定系数赤纬拟合标准差
29、若且则认为疑似目标像点队列符合目标运动规律,确认为目标,否则舍弃整个序列目标像点;其中fitthresh表示拟合决定系数阈值。
30、优选的,步骤5中,拍摄一帧新的图像,将图像时间带入赤经、赤纬的拟合式中,获得目标在图像中的预测位置,具体为:
31、拍摄一帧新的图像后,将图像时间带入下式中:
32、αp=kαtp+bα
33、δp=kδtp+bδ
34、得到目标的预测赤经位置αp、赤纬位置δp,并将其转化为惯性系矢量;其中tp表示:新拍摄图像相对于目标参数队列首帧的时间;
35、进一步通过星图识别得到的姿态将惯性系矢量转化为天基光学敏感器本体系矢量;
36、接着将天基光学敏感器本体系矢量通过相机标定模型转化为平面坐标,即目标在像平面中的预测位置。
37、优选的,步骤6中,在新拍摄图像中目标的预测位置附近通过窗口方式提取像点,若提取到多个像点,将像点的赤经、赤纬与目标预测值进行比较,选择置信度最高的像点作为当前帧目标点,具体为:
38、利用提取到的所有像点的赤经αcur、赤纬δcur、以及赤经的预测值αp和赤纬的预测值δp求取残差rα,rδ:
39、rα=|αp-αcur|
40、rδ=|δp-δcur|
41、若残差满足且则认为该像点符合目标规律,如果有多个符合的,选择残差最小的像点、即置信度最高的像点;其中outlierratio为残差判别阈值,为赤经拟合标准差,为赤纬拟合标准差。
42、优选的,步骤7中根据新拍摄图像的惯性姿态,计算目标像点的赤经、赤纬,并将赤经赤纬按照先入先出的原则,代替疑似目标队列中的最早的数据,重新对目标赤经、赤纬与时间关系的参数进行拟合,具体为:
43、设最新帧时间为tn+1,赤经为αn+1、赤纬为δn+1,则用于拟合的队列更新为:t2,t3,…,tn+1,赤经和赤纬分别为α2,α3,…,αn+1及δ2,δ3,…,δn+1,得到:
44、(1)重新拟合的表征赤经和时间关系的参数以及赤经拟合决定系数、赤经拟合标准差,赋值给kα、bα,
45、(2)重新拟合的表征赤纬和时间关系的参数以及赤纬拟合决定系数、赤纬拟合标准差,赋值给kδ、bδ、
46、据此对后续拍摄图像中的目标位置进行预测、提取,从而持续跟踪。
47、本发明与现有技术相比具有如下优点:
48、(1)本发明的基础是成熟的高精度恒星识别方法,为空间碎片捕获与跟踪提供准确的先验信息,提高准确率;
49、(2)本发明使用亚像素定心方法,质心定位精度高,并且具有高更新率;
50、(3)本发明通过独立计算并增加慢速目标帧间隔的方式提高慢速目标的信噪比,打破了光学系统和探测器噪声的限制,显著提高了目标探测的动态范围;
51、(4)本发明针对像点坐标而非原始图像进行目标捕获与跟踪计算,减小了计算复杂度,提升目标捕获与跟踪的实时性;
52、(5)本发明对窗口内的多个像点进行筛选,避免误跟踪,即利用最小二乘拟合以及残差筛选的方法进行窗口内多像点的筛选,确保输出正确的目标像点,提高了空间碎片探测的稳定性;
53、(6)本发明使用了目标队列管理的方法,将当前数据与历史数据进行关联与匹配,排除了多目标之间的干扰;
54、(7)本发明以成熟光学敏感器作为硬件平台,经过可靠验证,可以在惯性定姿的同时输出目标指向信息。
本文地址:https://www.jishuxx.com/zhuanli/20241021/320925.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表