CT成像方法及系统与流程
- 国知局
- 2024-10-21 15:21:31
本申请涉及ct成像,尤指ct成像方法及系统。
背景技术:
1、现有技术中,通过射线源和探测器围绕待检测目标旋转曝光(射线源正中经过旋转中心的射线恰好射向探测器正中央),以此获取待检测目标的ct(computed tomography,计算机体层摄影)图像。或者,通过将探测器偏置,即将探测器偏向一侧,从而在这一侧采集到更大范围的扫描数据,而另一侧的数据通过共轭光线来补足。
2、以上两种方式分别因为视场角(field of view,fov)偏小和扫描轨迹(即射线源和探测器的旋转角度)偏大而在使用过程中给用户(例如医生)带来困扰,且以上方式的图像重建过程会消耗比较多的时间。因此,如何在减少图像获取装置的扫描轨迹的基础上、获得大面积视场角,同时减少整体流程所占用的时间,是一个亟待解决的问题。
技术实现思路
1、有鉴于此,本申请公开ct成像方法及系统,使用两个射线源和探测器在较少的扫描轨迹的基础上,得到较大视野范围的ct图像;再使用相应的图像处理方法对获取的ct图像进行优化与重建,减少整体流程所占用的时间。
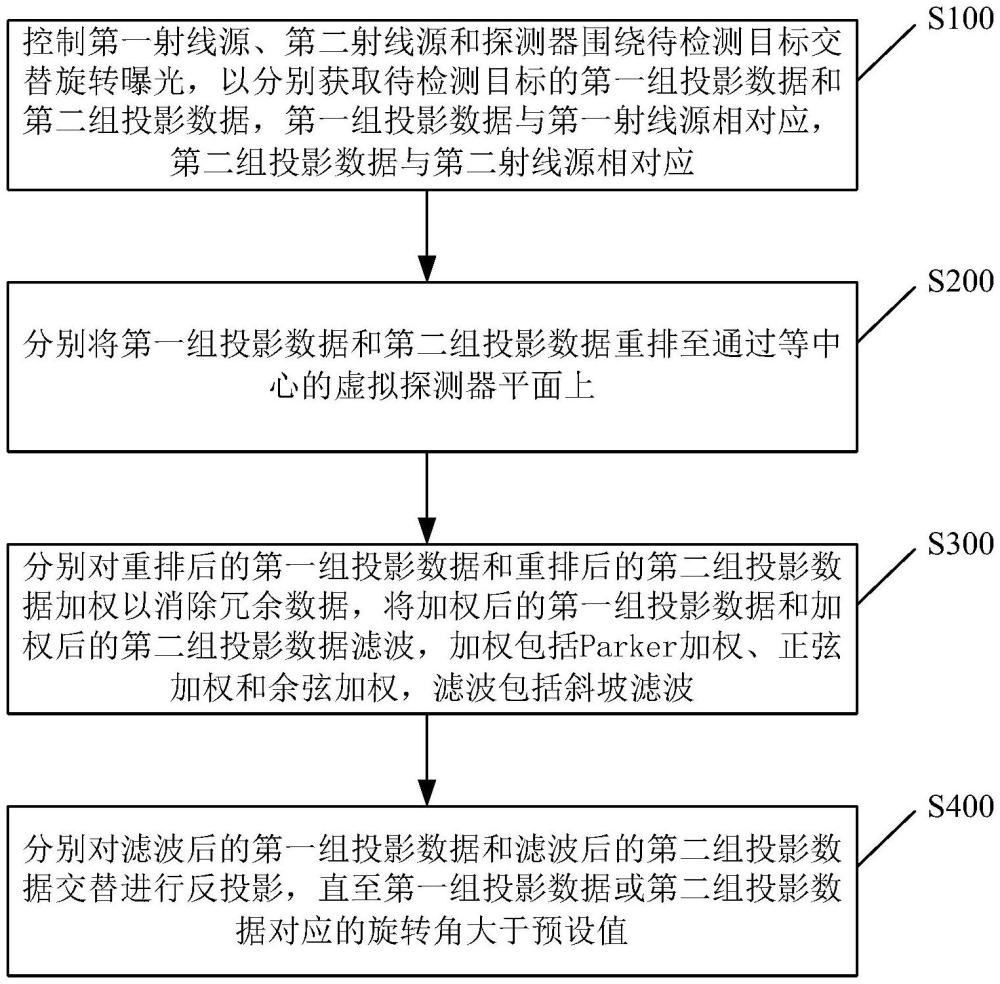
2、第一方面,本申请公开了一种ct成像方法,用于ct成像系统,ct成像系统包括第一射线源、第二射线源和探测器,第一射线源和第二射线源位于同一高度且第一射线源、第二射线源和探测器之间的相对位置保持不变,方法包括:控制第一射线源、第二射线源和探测器围绕待检测目标交替旋转曝光,以分别获取待检测目标的第一组投影数据和第二组投影数据,第一组投影数据与第一射线源相对应,第二组投影数据与第二射线源相对应;分别将第一组投影数据和第二组投影数据重排至通过等中心的虚拟探测器平面上;分别对重排后的第一组投影数据和重排后的第二组投影数据加权以消除冗余数据,将加权后的第一组投影数据和加权后的第二组投影数据滤波,加权包括parker加权、正弦加权和余弦加权,滤波包括斜坡滤波;分别对滤波后的第一组投影数据和滤波后的第二组投影数据交替进行反投影,直至第一组投影数据或第二组投影数据对应的旋转角大于预设值。
3、可选地,获取待检测目标的第一组投影数据和第二组投影数据之后,包括:对投影数据进行数据校正;数据校正包括以下操作中的一个或多个:亮暗场校正、坏点校正、射束硬化校正和散射校正。
4、可选地,分别将第一组投影数据和第二组投影数据重排至通过等中心的虚拟探测器平面上,计算公式为:
5、p′1(θ,u,v)=p1(θ,(rsinα2+ucosα2)m1+dsdtanα1,vm1),
6、
7、p′2(θ,u,v)=p2(θ,w-(rsinα2-ucosα2)m2-dsdtanα1,vm2),
8、
9、其中,p1为第一组投影数据,p1′为重排后的第一组投影数据,θ为旋转角,u,v分别为光线在探测器上的横坐标和纵坐标,α1为任一射线源、该射线源至探测器的垂足和探测器的最近边缘形成的角度,该射线源为顶点,α2为任一射线源、该射线源至探测器的垂足和待检测目标的中心形成的角度,该射线源为顶点,dsd为任一射线源与探测器的距离,dso为任一射线源到等中心平面的距离,r为任一射线源至待检测目标的中心的距离,p2为第二组投影数据,p2′为重排后的第二组投影数据,w为探测器的宽度。
10、可选地,分别对重排后的第一组投影数据和重排后的第二组投影数据加权以消除冗余数据,计算公式为:
11、
12、其中,表示parker加权后的第i组投影数据,表示用于第i组投影数据的parker加权函数,表示正弦加权后的第i组投影数据,表示用于第i组投影数据的正弦加权函数,为余弦加权后的第i组投影数据,i为1或2,α3为任一射线源、待检测目标的中心和探测器相较于该射线源的远端形成的角度,该射线源为顶点。
13、可选地,将加权后的第一组投影数据和加权后的第二组投影数据滤波,计算公式为:
14、
15、其中,为滤波后的第i组投影数据,h(u)为锥束斜坡滤波器。
16、可选地,分别对滤波后的第一组投影数据和滤波后的第二组投影数据交替进行反投影,直至第一组投影数据或第二组投影数据对应的旋转角大于预设值,计算公式为:
17、
18、
19、其中,it(x,y,z)为角度θt对应的反投影操作得到的三维重建结果,预设值大于等于π+2α2+2α3。
20、可选地,第一射线源和第二射线源的连线与探测器平行,任一射线源与探测器的距离为第一预设距离,第一射线源和第二射线源的连线与待检测目标的距离为第二预设距离,第一预设距离大于第二预设距离,第一射线源和第二射线源之间的第三预设距离小于边界值,边界值的计算公式如下:h=4*(h1-h2)*h2/w,其中,h为边界值,h1为第一预设距离,h2为第二预设距离,w为探测器的宽度;第一射线源和第二射线源在旋转时根据预设频率曝光。
21、可选地,第一预设距离大于或等于80厘米且小于或等于200厘米,第二预设距离大于或等于40厘米且小于或等于150厘米。
22、可选地,第一射线源、第二射线源和探测器的旋转角度小于360度。
23、第二方面,本申请公开一种ct成像系统,包括存储器、处理器及存储在存储器上的计算机程序,处理器执行计算机程序以实现以上第一方面的ct成像方法。
24、综上,本申请公开的ct成像方法及系统的有益效果在于:利用合理排布的两个射线源采集数据间的互补特性,结合的图像重建算法,在不足360度的弧形扫描轨迹下实现大视野锥形束ct成像;且该成像方法不会对重建的图像质量造成损失。该ct成像方法可以与骨科术中成像中使用的c-arm cbct装置相结合实现大视野成像,从而为骨科手术医生提供更充足的患者信息,并减少摆位难度。此外,该系统可以在大视野成像的基础上尽可能减少扫描角度,从而减少单次成像需要的扫描时间,可以应用于放疗中等成像场景,为自适应放疗计划提供更加实时的图像支持。再有一点,本申请中每个射线源的投影处理可以相互独立,以此减少了整体流程所占用的时间。
技术特征:1.一种ct成像方法,其特征在于,用于ct成像系统,所述ct成像系统包括第一射线源、第二射线源和探测器,所述第一射线源和所述第二射线源位于同一高度且所述第一射线源、所述第二射线源和所述探测器之间的相对位置保持不变,所述方法包括:
2.根据权利要求1所述的ct成像方法,其特征在于,所述的获取所述待检测目标的第一组投影数据和第二组投影数据之后,包括:对所述投影数据进行数据校正;
3.根据权利要求1所述的ct成像方法,其特征在于,所述的分别将所述第一组投影数据和所述第二组投影数据重排至通过等中心的虚拟探测器平面上,计算公式为:
4.根据权利要求3所述的ct成像方法,其特征在于,所述的分别对重排后的第一组投影数据和重排后的第二组投影数据加权以消除冗余数据,计算公式为:
5.根据权利要求4所述的ct成像方法,其特征在于,所述的将加权后的第一组投影数据和加权后的第二组投影数据滤波,计算公式为:
6.根据权利要求3-5任一项所述的ct成像方法,其特征在于,所述的分别对滤波后的第一组投影数据和滤波后的第二组投影数据交替进行反投影,直至所述第一组投影数据或所述第二组投影数据对应的旋转角大于预设值,计算公式为:
7.根据权利要求1所述的ct成像方法,其特征在于,所述第一射线源和所述第二射线源的连线与所述探测器平行,任一射线源与所述探测器的距离为第一预设距离,所述第一射线源和所述第二射线源的连线与所述待检测目标的距离为第二预设距离,所述第一预设距离大于所述第二预设距离,所述第一射线源和所述第二射线源之间的第三预设距离小于边界值,所述边界值的计算公式如下:
8.根据权利要求7所述的ct成像方法,其特征在于,所述第一预设距离大于或等于80厘米且小于或等于200厘米,所述第二预设距离大于或等于40厘米且小于或等于150厘米。
9.根据权利要求1所述的ct成像方法,其特征在于,所述第一射线源、所述第二射线源和所述探测器的旋转角度小于360度。
10.一种ct成像系统,其特征在于,包括存储器、处理器及存储在存储器上的计算机程序,所述处理器执行所述计算机程序以实现权利要求1-9任一项所述的ct成像方法。
技术总结本申请提供了一种CT成像方法及系统,涉及CT成像技术领域。该方法用于CT成像系统,该系统包括第一射线源、第二射线源和探测器,两个射线源位于同一高度且两个射线源和探测器之间的相对位置保持不变,方法包括:控制第一射线源、第二射线源和探测器围绕待检测目标旋转曝光,以分别获取待检测目标的第一组投影数据和第二组投影数据;分别将第一组投影数据和第二组投影数据先后执行重排、加权和滤波操作;分别对滤波后的第一组投影数据和滤波后的第二组投影数据交替进行反投影,直至第一组投影数据或第二组投影数据对应的旋转角大于预设值。该方法能够以较短的扫描轨迹实现较大的锥形束CT成像,且减少整体流程所占用的时间。技术研发人员:吕天翎,张旭升,奚岩,姜晓磊受保护的技术使用者:上海一影信息科技有限公司技术研发日:技术公布日:2024/10/17本文地址:https://www.jishuxx.com/zhuanli/20241021/321315.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。