一种高精度的调平装置、调平台以及调平方法与流程
- 国知局
- 2024-10-21 15:27:44
本技术涉及光刻机设备,尤其涉及一种高精度的调平装置、调平台以及调平方法。
背景技术:
1、高精度调平技术在多个领域都发挥着重要作用,并且高精度的调平机构被广泛应用于各类领域,例如,在光学设备中,显微镜的成像质量直接受到其调平精度的影响;在半导体制造过程中,光刻、刻蚀等关键工艺对设备的调平精度有极高要求。在电子、汽车等行业的精密装配过程中,高精度的调平技术可以确保零部件的准确装配,减少装配误差,提高产品的整体性能;在航空航天领域,飞行器的姿态控制对调平精度也具有极高要求。
2、同时,调平技术可以分为被动调平和主动调平。被动调平具有响应速度慢、调平精度低、延迟性高的缺点,主动调平可以实现快速且高精度的调平。
3、其中,大多主动调平机构往往采用音圈电机进行驱动,其通过驱动器直接驱动,无需中间传动环节,如齿轮、皮带等,从而减少了能量损失和机械摩擦,提高了系统的整体效率。并使得音圈电机具有高精度(其精度可以达到微米级甚至纳米级)、高响应速度、高加速度、运动平滑、高可靠性和易于控制的特点。因此,采用音圈电机的主动调平机构,被广泛应用于高精度调平技术领域,例如,在光刻技术领域中对硅片的调平过程。
4、然而,音圈电机也存在着调平结果稳定性差,容易引起漂移的情况,从而导致最终的调平结果不好,为了发挥出音圈电机的高精度调平的效果,则需要采用极其复杂的控制系统,高频次的对音圈电机进行调节和控制,使得音圈电机在的高精度调平领域中应用的控制成本极高。
技术实现思路
1、本技术的目的在于解决现有技术中调平装置在具有高精度调平功能的情况下,如何降低主动调平机构的控制难度和运作成本的问题。因此,本技术提供了一种高精度的调平装置,基于滚珠丝杆和刚性支撑件,将滚珠丝杆的转动行程转化为刚性支撑件支撑面高度上的位移,并通过滚珠丝杆两端的联轴器保证滚珠丝杆转动过程的精准性,通过拉伸组件,消除刚性支撑件与滚珠丝杆之间的回程间隙,确保刚性支撑件位移的精准性和可控性,同时可以保证刚性支撑件到位后的支撑稳定性;进一步的,采用多个位移检测装置实现对刚性支撑件位移精准监控;从而通过采用机械传动式的主动调平方案,保证了调平后的稳定性和可靠性,同时通过多种措施消除机械传动过程中的误差,保证了调平装置的调节精度。
2、本技术实施例提供了一种高精度的调平装置,包括:
3、调平基板,传动组件和驱动组件;所述驱动组件通过所述传动组件与所述调平基板连接,并调节所述调平基板的高度;
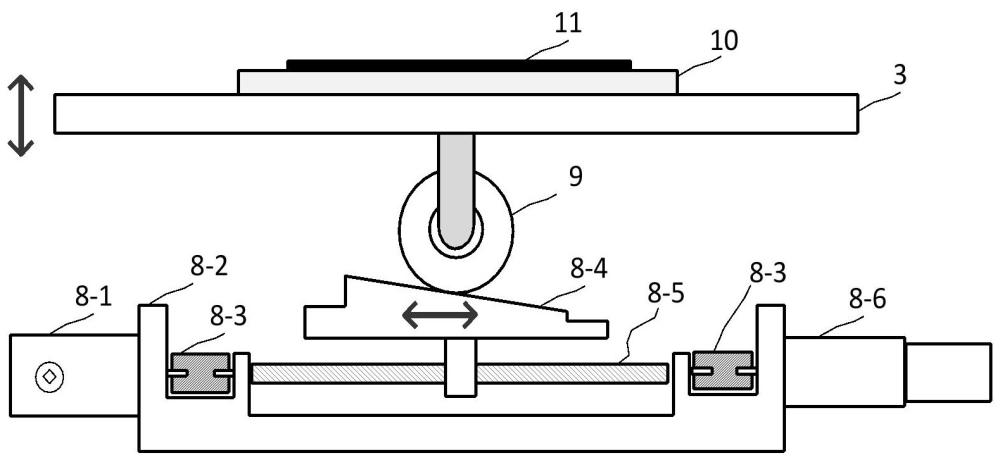
4、所述驱动组件包括刚性底座以及沿第一方向设置于所述刚性底座的滚珠丝杆;
5、所述滚珠丝杆的一端通过联轴器连接有驱动件,另一端通过联轴器设置有第一位移检测单元;
6、所述滚珠丝杆活动设置有刚性支撑件,所述刚性支撑件包括与所述滚珠丝杆配合的驱动部,以及背离所述驱动部的支撑面;
7、所述刚性支撑件的一端设置有拉伸组件,所述拉伸组件用于对所述刚性支撑件施加沿第一方向的预紧力;
8、所述驱动件通过驱动所述滚珠丝杆转动带动所述刚性支撑件在第一方向上位移,且所述刚性支撑件的支撑面,在所述第一方向上的支撑高度呈连续变化;
9、所述滚珠丝杆的两侧分别设置有第二位移检测单元和第三位移检测单元;
10、所述第一位移检测单元根据所述滚珠丝杆的转动检测所述刚性支撑件在第一方向上的位移;
11、所述第二位移检测单元用于检测所述滚珠丝杆上所述刚性支撑件在第一方向上的限位位置;
12、所述第三位移检测单元用于检测所述刚性支撑件的零位到位状态。
13、采用上述技术方案,滚珠丝杆与刚性支撑件之间的传动连接,可以将滚珠丝杆的转动过程转化至刚性支撑件沿第一方向的位移,同时由于支撑面在第一方向上的高度变化,从而可以通过刚性支撑件在第一方向的位移,改变同一竖直方向上的支撑高度。通过设置传动比即可实现初步精度的位移调节,并设置有拉伸组件用于对刚性支撑件施加沿第一方向的预紧力;从而保证滚珠丝杆与刚性支撑件之间保持持续的贴合,消除传动过程中的回程间隙,进一步提高调平装置的调节精度。
14、并且,通过第一位移检测单元检测刚性支撑件在第一方向上的位移,第二位移检测单元检测滚珠丝杆上刚性支撑件在第一方向上的限位位置,以及第三位移检测单元检测刚性支撑件的零位到位状态。从而实现对刚性支撑件全过程位移的检测和多重纠正,确保对刚性支撑件位移检测的精准性,以提升调平装置调节过程的高可控性和高精度。
15、在一些实施例中,所述传动组件抵接于所述支撑面,且所述传动组件相对于所述底座在所述水平方向上固定设置,在所述高度方向上活动设置;
16、所述传动组件包括连接件以及转动设置于所述连接件的抵接轮;且所述传动组件通过所述抵接轮与所述支撑面抵触连接;
17、所述连接件背离所述抵接轮的一侧设置有板簧,并且所述传动组件通过所述连接件和所述板簧固定设置于调平基板。
18、在一些实施例中,所述驱动组件还包括围绕所述底座设置的框架组件;
19、所述框架组件包括底层框架、上层框架以及连接所述底层框架和所述上层框架的侧框架;
20、所述底座与所述底层框架固定连接,并通过所述底层框架与外部物体连接;
21、所述上层框架位于所述支撑面上方,并对应于所述抵接轮设置有贯通空间;
22、所述上层框架与所述传动组件的连接件之间设置有限位结构,并通过所述限位结构限制所述传动组件相对于所述底座在所述水平方向上的运动。
23、在一些实施例中,所述第二位移检测单元设置为沿第一方向呈间隔设置的两个接近式开关;
24、所述第三位移检测单元设置为光电位置传感器;
25、所述刚性支撑件设置为楔形结构,且楔形结构的斜面设置为所述支撑面。
26、在一些实施例中,调平装置还包括:
27、检平组件,所述检平组件包括光源、第一光路模块、第二光路模块和感应装置;
28、所述调平基板设置有光路反射区,所述光源发出的检测光经过所述第一光路模块聚集至所述光路反射区,所述第二光路模块接收所述光路反射区的反射光,并聚焦至所述感应装置;
29、所述感应装置根据检测的反射光的变化确定所述调平基板的姿态。
30、在一些实施例中,所述第一光路模块,包括沿光路方向依次设置的第一入射透镜、发射端反射镜和第二入射透镜;其中,所述第一入射透镜和所述第二入射透镜均为凸透镜;
31、所述第二光路模块,包括沿光路方向依次设置的第二反射透镜、接收端反射镜和第一反射透镜;其中,所述第一反射透镜和所述第二反射透镜均为凸透镜。
32、在一些实施例中,还包括控制单元,所述控制单元与所述第一位移检测单元、所述第二位移检测单元、所述第三位移检测单元、感应装置和驱动件连接;
33、所述控制单元的控制过程包括:
34、根据所述第一位移检测单元、所述第二位移检测单元和所述第三位移检测单元的信号,控制驱动件带动所述刚性支撑件至所述零位到位状态;
35、根据所述感应装置判断所述调平基板的姿态是否满足调平精度要求,若不满足则控制所述驱动件进行调平补偿,直至所述调平基板的姿态满足调平精度要求。
36、本技术还提供了一种高精度的调平台,包括:至少三个如上述实施例所述的调平装置;
37、所述至少三个调平装置呈中心对称分布,并具有对称中心,且共用同一所述调平基板和检平组件。
38、在一些实施例中,调平台还包括水平运动平台和控制单元,所述至少三个调平装置安装于所述水平运动平台;并且,控制单元同时连接所述至少三个调平装置;
39、所述调平基板对应于至少三个所述调平装置的所述对称中心设置有吸盘,且所述吸盘吸附设置有基底;
40、所述光路反射区设置于所述基底。
41、本技术还提供了一种调平方法,包括如上述实施例所述的调平台,具体步骤包括:
42、s1、在所述控制单元中加载所述基底;
43、s2、控制所述水平运动平台移动,并使所述光路反射区移动至所述检平组件可检测的区域;
44、s3、执行调平测量,获取所述调平装置相对于所述对称中心的倾斜量;
45、s4、根据所述感应装置判断所述调平基板的姿态是否满足调平精度要求,若所述调平基板的姿态满足调平精度要求,则保持所述调平装置的状态;
46、s5、若不满足,则控制各调平装置进行调平补偿;并重复步骤s3~s5,直至所述调平基板的姿态满足调平精度要求。
47、本技术其他特征和相应的有益效果在说明书的后面部分进行阐述说明,且应当理解,至少部分有益效果从本技术说明书中的记载变的显而易见。
本文地址:https://www.jishuxx.com/zhuanli/20241021/321613.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。