用于高精度侧链路定位的用户设备和方法与流程
- 国知局
- 2024-10-21 15:28:11
背景技术:
1、图1是地面无线网络100的示例的示意图,如图1(a)所示,包括核心网络102和一个或多个无线电接入网络ran1、ran2、...rann(ran=无线电接入网络)。图1(b)是无线电接入网络rann的示例的示意图,该无线电接入网络rann可以包括一个或多个基站gnb1到gnb5(gnb=下一代节点b),每个基站服务于基站周围的特定区域,由相应的小区1061到1065示意性地表示。提供基站来服务小区内的用户。一个或多个基站可以在授权和/或非授权频带中为用户提供服务。术语基站,bs,是指5g网络中的gnb,umts/lte/lte-a/lte-a pro中的enb,或其他移动通信标准中的bs。用户可以是固定设备或移动设备。无线通信系统也可以由连接到基站或用户的移动或静止iot(物联网)设备接入。移动设备或者iot设备可以包括物理设备、诸如机器人或者汽车的基于地面车辆、诸如有人驾驶或者无人驾驶飞行器(uav)的飞行器(后者也称为无人驾驶飞机)、建筑物和其他物品或者设备,它们具有嵌入其中的电子设备、软件、传感器、致动器等,以及使这些设备能够在现有网络基础结构上收集和交换数据的网络连接性。图1(b)示出了五个小区的示例性视图,然而,rann可以包括更多或更少的这样的小区,并且rann也可以仅包括一个基站。图1(b)示出了两个用户ue1和ue2(ue=用户设备),也称为用户设备(ue),它们在小区1062中并且由基站gnb2服务。另一个用户ue3被示出在由基站gnb4服务的小区1064中。箭头1081、1082和1083示意性地表示用于将数据从用户ue1、ue2和ue3传输到基站gnb2、gnb4或者用于从基站gnb2、gnb4传输数据到用户ue1、ue2、ue3的上行链路/下行链路连接。这可以在授权频段或非授权频段上实现。此外,图1(b)示出了小区1064中的两个iot设备1101和1102,如iot设备,它们可以是静止的或移动的设备。iot设备1101经由基站gnb4接入无线通信系统以接收和发送数据,如箭头1121示意性表示的。iot设备1102经由用户ue3接入无线通信系统,如箭头1122示意性表示的。相应的基站gnb1到gnb5可以连接到核心网络102,例如经由s1接口,经由在图1(b)中由指向“核心”的箭头示意性地表示的相应的回程链路1141到1145。核心网络102可以连接到一个或多个外部网络。外部网络可以是互联网,或者私有网络,诸如内部网络或任何其他类型的校园网络,例如私有wifi或4g或5g移动通信系统。此外,相应的基站gnb1到gnb5中的一些或全部可以例如经由s1或x2接口或nr(新无线电)中的xn接口,经由在图1(b)中由指向“gnb”的箭头示意性地表示的相应的回程链路1161至1165,彼此连接。侧链路信道允许ue之间的直接通信,也称为设备到设备(d2d,device to device)通信。3gpp(3g合作计划)中的侧链路接口命名为pc5(基于接近性的通信5)。
2、对于数据传输,可以使用物理资源网格。物理资源网格可包括各种物理信道和物理信号映射到的一组资源元素。例如,物理信道可以包括承载用户特定数据(也称为下行链路、上行链路和侧链路有效载荷数据)的物理下行链路共享信道(pdsch,physicaldownlink shared channel)、物理上行链路共享信道(pusch,physical uplink sharedchannel)和物理侧链路共享信道(pssch,physical sidelink shared channel),承载例如主信息块(mib)和一个或多个系统信息块(sib),一个或多个侧链路信息块(slib)(如果支持)的物理广播信道(pbch,physical broadcast channel),承载例如下行链路控制信息(dci),上行链路控制信息(uci),和侧链路控制信息(sci)的物理下行链路控制信道(pdcch,physical downlink control channel)、物理上行链路控制信道(pucch,physicaluplink control channel)和物理侧链路控制信道(pssch,physical sidelink controlchannel),和承载pc5反馈响应的物理侧链路反馈信道(psfch,physical sidelinkfeedback channel)。注意,侧链路接口可以支持两阶段sci(语音呼叫项目),这指的是包含sci的某些部分的第一控制区域,以及可选的包含控制信息的第二部分的第二控制区域。
3、对于上行链路,物理信道还可包括物理随机接入信道(prach,packet randomaccess channel)或(rach,random access channel),当ue同步并获得mib和sib时,ue使用该信道接入网络。物理信号可以包括参考信号或符号rs、同步信号等。资源网格可包括在时域具有一定持续时间并在频域具有给定带宽的帧或无线电帧。帧可以有一定数量的预定义长度的子帧,例如,1毫秒。每个子帧可以包括的一个或多个取决于循环前缀(cp)长度的12或14个ofdm符号(ofdm=正交频分复用)的时隙。帧还可以包括较少数量的ofdm符号,例如,当利用缩短的传输时间间隔(stti,slot or subslot transmission time interval)或者包括仅几个ofdm符号的基于微时隙/非时隙的帧结构时。
4、无线通信系统可以是使用频分复用的任何单音或者多载波系统,例如正交频分复用(ofdm)、或正交频分多址(ofdma,orthogonal frequency-division multiple access)系统或者任何其他有或者没有循环前缀(cp)的基于ifft的信号(ifft=快速傅里叶逆变换),例如dft-s-ofdm,(dft=离散傅里叶变换)。可以使用其他波形,例如用于多址接入的非正交波形,例如滤波器组多载波(fbmc)、广义频分复用(gfdm)或者通用滤波多载波(ufmc)。无线通信系统可以例如根据lte-advanced pro标准或者5g或者nr(新空口)标准,或nr-u(新空口-免许可)标准进行操作。
5、图1中描绘的无线网络或通信系统可以是具有不同重叠网络的异构网络,例如宏小区网络,每个宏小区包括如基站gnb1至gnb5的宏基站、和如毫微微基站或者微微基站的小小区基站的网络(图1中未示出)。除了上述地面无线网络之外,还存在非地面无线通信网络ntn,包括诸如卫星的星载收发器和/或诸如无人机系统的机载收发器。非地面无线通信网络或者系统可以按照与以上参考图1描述的地面系统类似的方式进行操作,例如,根据lte-advanced pro标准或者5g或者nr(新空口)标准。
6、在移动通信网络中,例如上面参考图1描述的网络中,如lte或5g/nr网络中,可以存在通过一个或多个侧链路sl信道直接相互通信的ue,例如,使用pc5/pc3接口或wifi直连进行通信。通过侧链路直接相互通信的ue可包括直接与其他车辆通信(v2v通信)的车辆、与无线通信网络的其他实体通信(v2x通信)的车辆,其他实体例如路边单元rsu、路边实体,如交通信号灯、交通标志或行人。rsu可具有bs或ue的功能,这取决于具体的网络配置。其他ue可不是与车辆有关的ue,并可包括上述任何设备。这样的设备也可以使用sl信道直接相互通信,即d2d通信。
7、准确定位是安全关键汽车用例(如连接驾驶、辅助驾驶、自主驾驶或远程操作驾驶的类别)的关键元素。定位包括简单的一维距离测量,横向和纵向的二维距离,加上相对于物体的高度坐标的三维距离、以及二维甚至三维的绝对位置,例如由地理坐标给出。例如,对于车对外界的信息交换(v2x),在道路用户(ru),如车辆的轨迹在不同水平上交叉的用例中,就需要第三维。例如,汽车在另一辆汽车在上面的桥梁上穿过其道路的情况下不应该启动紧急刹车,反之亦然。
8、在无线通信网络中,如图1所示无线通信网络的,可能期望以一定的准确度定位ue,例如,确定ue在小区中的位置。有几种已知的定位方法,如基于卫星的定位方法,如自主和辅助的全球导航卫星系统,gnss(全球导航卫星系统),诸如gps;移动无线电蜂窝定位方法,如观测到达时间差(otdoa),以及增强小区id(e-cid);或它们的组合。
9、基于gnss和无线电接入网络(ran)的定位是公认的最新技术。然而,这些系统都需要卫星分别覆盖移动网络小区。机载传感器是当今相对定位的经典工具,独立于gnss或移动网络覆盖。
10、侧链路被设计以在覆盖内、部分覆盖和覆盖外(ooc)操作,因此是相对定位的原生候选方案。此外,通过包含具有固定位置的锚设备(如路边单元(rsu))或通过其他方式例如gnss知道其位置的移动设备,可以实现绝对侧链路定位。当与其他机载传感器融合在一起时,侧链路定位将提高定位准确度,其中术语“侧链路定位”表示“可以在侧链路上测量的用于确定位置并增强整体定位结果的任何东西”。在无法达到所要求的准确度的情况下,它可以增强uu和gps绝对定位,即使当gnss或移动网络覆盖不可用时。它通过补充机载传感器提供了增强高级用例的机制,诸如v2x定位场景,包括vru(脆弱道路用户)和交通监管。
11、侧链路定位需要适应新的5g v2x用例的新的或增强的定位方法,如[2]中定义的。它可以为传统的基于传感器的定位提供额外输入,以补充/增强当前的定位方法,以满足新的5g用例所需的严格要求。因此,它将使准确定位独立于网络或rat覆盖状态(即在网络覆盖中或在网络覆盖之外),并因此为高级应用提供关键的可靠性支持。基于侧链路(sl)的定位可以使用非授权频谱,而不会中断现有的v2x部署。它在v2x场景中,如车辆到车辆(v2v)、车到基础设施(v2i)车辆位置(例如基于ue类型rsu信号),以及车到行人(v2p)场景,提供了相对或绝对定位的显著提高的准确度,从而显著降低了车辆与行人之间的事故的数量和严重程度。这种安全关键场景要求低于米级的准确度,例如对于自动驾驶相关用例为0.1m与3sigma。
12、距离测量的基本原理是传输参考信号(rs),并在接收器处将其与rs的副本互相关。然后,通过考虑光速,可以从互相关峰值的时间位置估计出距离。此估计的精度或准确度受到噪声和干扰以及信号的多路径传播的影响。
13、在较简单的单个传播路径的情况下,互相关峰值的宽度与信号(例如侧链路或任何其他信号,如上行链路(ul)或下行链路(dl))的带宽成反比。为了证明这种关系,侧链路的频谱可以用矩形函数来建模和近似。假设此频谱中的所有子载波都用于相同幅度的参考信号,即它们对于传输器(tx)和接收器(rx)是已知的。在接收后,此信号与所传输的参考信号的副本互相关,产生sinc形状(sin(x)/x)的脉冲响应。作为示例,图2示出了带宽为10mhz(左)和20mhz(右)时的脉冲响应。
14、可以看出,带宽加倍将使时域中的脉冲宽度减小为一半。初看,估计峰值最大值的正确位置似乎与带宽无关。然而,添加噪声和干扰会导致与图2中具有概率分布(如高斯)的理想曲线的随机偏差。时间不确定性则取决于使用方差定义脉冲宽度的假设。
15、在更困难的多路径传播情况下,任务是在los路径(代表想要的距离)的时间内估计峰值的位置,通常是第一峰值。目的是将其与通常由多路径(反射)产生的较晚到达的路径区分开来。更大的带宽有助于分离到达的路径。对于较低的带宽,它们会更早地(甚至对于较长的多路径偏差)融入彼此,并且无法区分。可以区分两个峰值的最小距离称为时间分辨率。
16、图3示出了两个相互时移的脉冲响应(双脉冲)在分辨率极限处的分辨率(下部)。对于第一基本分析,时间分辨率可以通过两个相互时移的脉冲之和来建模。如果脉冲之间的时间距离足够高,此双脉冲的函数表现出两个峰值,中间有一个山谷,如图3的上部所示。如果它们的距离减小,山谷在分辨率极限处消失,且两个脉冲融合为一个,如图3的下部所示。它们刚好可被区分的时移是分辨率。
17、分辨率可以从函数在两个脉冲中间处的曲率,即它的二阶导数来计算。如果山谷是可见的,如图3的上部中,二阶导数是正的,如果脉冲融合为一个,它是负的。因此,如果二阶导数为零,则达到分辨率极限(如图3的下部中所示)。
18、图4示出了在两个脉冲之间的中间处评估的两个10mhz脉冲的二阶导数。第一过零标志着两个脉冲融合的情况,如图3下部中所示。特别地,图4示出了对于带宽为10mhz,两个脉冲之间的中间处的二阶导数对它们的相互时移。在具有低于0.13μs处的第一零点的负0.2导数的区域中,两个脉冲无法分辨。对于大于此的时移,两个脉冲分开,并且可以区分出来。在光速下,0.13μs的时移换算成空间距离约39.76m。这意味着,将需要400mhz的带宽以获得1m的分辨率。
19、事实上,分辨率总是比由噪声结合脉冲形状给出的时机准确度更悲观,如图2所示,因为噪声和干扰总是存在。然而,上述模型是多路径情况下的最坏情况,因此在实际应用中时间延迟估计通常更为精确。因此,来自不同源的声明指示,在带宽超过100mhz的情况下,可以实现小于1m的准确度。
20、在欧洲,目前在5.9ghz频段上为v2x预留了70mhz。然而,它们需要被分割以用于892.11p和c-v2x lte和nr。因此,在典型频带(例如its频带)中的侧链路载波带宽预计会相当有限,例如只有10mhz或20mhz。因此,根据上述描述,亚米(sub meter)区域的精度似乎是不可行的。此ipr描述了如何实现更高精度的方法。
21、目前,直至5g nr第17版,3gpp尚未规定支持侧链路定位。
22、图5示出了基于uu接口的现有5g nr定位无线网络架构(见[3])的示例。此外,图5a示出了基于uu接口的无线网络或通信系统,该无线网络或通信系统可以是具有不同覆盖网络的地面异构网络,例如,宏小区的网络,其中每个宏小区包括宏基站,如bs1到bs4基站;以及小小区基站的网络(图5中未示出),如毫微微或微微基站。此外,存在非地面无线通信网络(ntn),包括星载收发器,如卫星,和/或机载收发器,如无人驾驶系统。
23、基本上涉及计算ue的位置的网络实体是核心网络的一部分,并且包括位置管理功能(lmf)和接入与移动管理功能(amf)。lmf和amf使用网络层信令协议(nl1)进行通信。
24、[3]中列出了多种最新的定位方法。这些方法可被归类为基于非ran和基于ran。非ran定位由gnss、wlan、蓝牙和地面信标系统(tbs)或传感器提供。
25、基于lte的基于ran的方法为增强小区id(ecid)和观测到达时间差(otdoa)。
26、nr通过nr增强小区id(nr ecid)、多往返时间定位(multi-rtt)、下行链路到达时间差(dl-tdoa)、上行链路到达时间差(ul-tdoa)、下行链路离开角度(dl-aod)或上行链路到达角度(ul-aoa)等方法扩展定位,上行链路到达角度包括到达方位角(a-aoa)和到达天顶角(z-aoa)。
27、上面列出的所有方法都力求在二维或三维的空间中尽可能精确地确定设备的位置。在这些方法中,可以识别两种基本测量作为所有定位方法的基础,它们明显地确定其精度,即距离和/或角度测量。
28、需要注意的是,上述部分中的信息仅用于增强对本发明背景的理解,因此可以包含本领域普通技术人员已经知道的不构成现有技术的信息。
29、从以上开始,可能需要改进或增强无线通信系统或网络及其组件。
技术实现思路
1、提供了一种无线通信系统的第一用户设备。
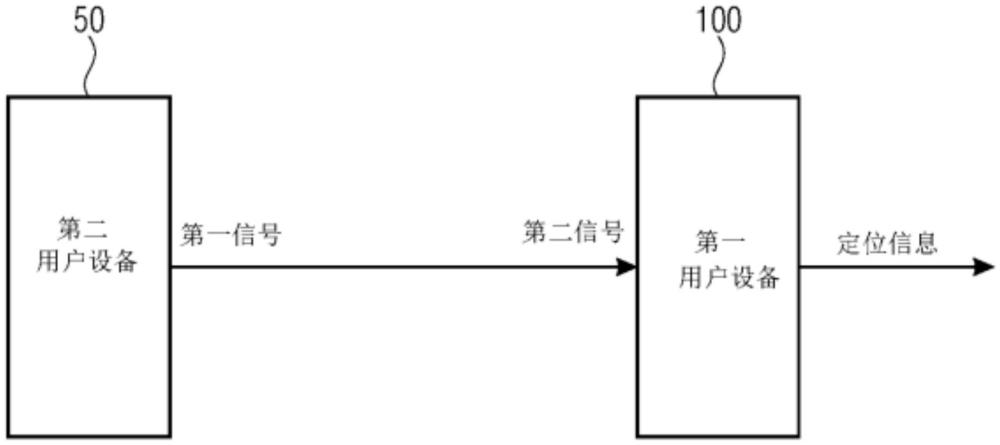
2、在无线通信系统的第二用户设备已经经由第二用户设备和第一用户设备之间的侧链路向第一用户设备传输作为参考信号或控制信号或数据信号的第一信号之后,第一用户设备被配置为经由侧链路从第二用户设备接收所述参考信号或所述控制信号或所述数据信号作为第二信号。此外,第一用户设备被配置为根据差异信息确定定位信息,其中差异信息包括关于已由第二用户设备传输的第一信号与已由第一用户设备接收的第二信号之间的一个或多个差异的信息。定位信息包括关于第一用户设备和第二用户设备之间的距离和/或距离变化和/或第一用户设备的位置和/或第二用户设备的位置和/或取决于第一用户设备的位置和第二用户设备的位置的角度的信息。
3、此外,还提供了一种方法。该方法包括:
4、-在无线通信系统的第二用户设备(50)已经经由第二用户设备(50)和第一用户设备(100)之间的侧链路向第一用户设备(100)传输作为参考信号或控制信号或数据信号的第一信号后,通过第一用户设备(100)经由侧链路从第二用户设备(50)接收所述参考信号或所述控制信号或所述数据信号作为第二信号;以及
5、-根据差异信息确定定位信息,其中差异信息包括关于已由第二用户设备传输的第一信号与已由第一用户设备接收的第二信号之间的一个或多个差异的信息。
6、定位信息包括关于第一用户设备和第二用户设备之间的距离和/或距离变化和/或第一用户设备的位置和/或第二用户设备的位置和/或取决于第一用户设备的位置和第二用户设备的位置的角度的信息。
7、此外,提供了计算机程序,当计算机程序由计算机或信号处理器执行时用于实现上述方法。
8、提供了使用参考信号基于时间延迟测量实现距离测量的实施例。在时域中,例如这可以对应于确定相关峰值的位置,在频域中,关于测量带宽上的相位轨迹,特别是识别相位斜坡。利用载波的相位可以进一步细化,载波的相位在时间中出现在相关峰值的相位中或在频域中出现在相位轨迹的偏移中。
9、一些实施例提供了用于基于pc5侧链路和相应波形的高精度距离和角度测量的手段,这些波形可以是,例如,正交频分复用(ofdm)。
10、提供的一些实施例实现了基于pc5接口的高精度距离测量,并提供基于pc5的定位架构、在侧链路上定位参考信号、利用载波聚合的带宽增强、使用载波相位的定位、分布式天线以及在更高层上的信令和过程中的至少一种。
11、在从属权利要求中提供了进一步的具体实施例。
本文地址:https://www.jishuxx.com/zhuanli/20241021/321630.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表