一种基于系统成本函数优化的无人机通感一体化系统飞行轨迹优化及资源分配方法
- 国知局
- 2024-11-06 14:24:19
本发明属于无线通信,涉及一种基于系统成本函数优化的无人机通感一体化系统飞行轨迹优化及资源分配方法。
背景技术:
1、无人机因具有灵活性高、成本低及易部署等优点,在无线通信和目标感知系统中均得到了广泛应用。通过在无人机上部署通信感知模块,将无人机与通信感知一体化技术相结合,可同时实现无人机辅助的用户通信与目标感知,提升信息传输及目标感知性能。然而,无人机通感一体化系统存在通信及感知功能对于频谱、时隙及功率等多维资源竞争的问题,如何设计无人机飞行轨迹及资源分配方法,实现通信感知系统性能优化是亟待解决的问题。
2、目前已有文献研究无人机通信感知一体化问题,如有文献基于通信及感知系统频谱资源紧张的问题,设计波束共享方案,以提升无人机协同感知性能;有文献提出一种融合周期性感知和通信机制的无人机辅助通信感知系统,通过联合优化无人机轨迹、发射预编码和周期性传感的感知时隙,实现用户可达速率的最大化,然而,现有研究较少考虑通信及感知系统性能的联合优化,以及无人机飞行轨迹、通信感知预编码及通信感知调度设计问题,难以实现复杂场景下通信感知一体化系统性能优化。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种基于系统成本函数优化的无人机通感一体化系统飞行轨迹优化及资源分配方法。针对包含单架多天线无人机、j个用户和k个感知目标的系统场景,建模系统成本函数为优化目标,实现无人机通信感知预编码、通信感知调度策略及无人机轨迹的联合优化。
2、为达到上述目的,本发明提供如下技术方案:
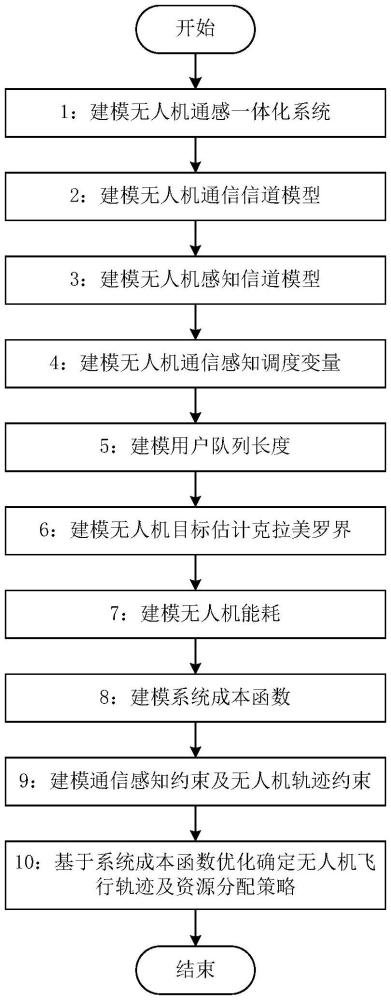
3、一种基于系统成本函数优化的无人机通感一体化系统飞行轨迹优化及资源分配方法,针对单架多天线无人机、j个用户和k个感知目标的系统场景,具体包括以下步骤:
4、s1:建模无人机通感一体化系统;
5、s2:建模无人机通信信道模型;
6、s3:建模无人机感知信道模型;
7、s4:建模无人机通信感知调度变量;
8、s5:建模用户队列长度;
9、s6:建模无人机目标估计克拉美罗界;
10、s7:建模无人机能耗;
11、s8:建模系统成本函数;
12、s9:建模通信感知约束及无人机轨迹约束;
13、s10:基于系统成本函数优化确定无人机飞行轨迹及资源分配策略。
14、进一步,步骤s1中,建模无人机通感一体化系统模型,具体包括:系统包含单架多天线无人机、j个用户和k个感知目标,无人机天线数目为m;无人机内置通信感知模块,可与用户通信并发送数据包,也可发送雷达信号,对目标状态进行估计;将系统时间划分为t个等长的时隙,每个时隙的长度为τ;无人机采用频分多址技术进行通信及目标估计,令b、bs分别表示通信信道及感知信道的带宽;假设无人机飞行高度固定为h,最高飞行速度为vmax,令q(t)=[xu(t),yu(t)]t表示t时隙无人机的位置,1≤t≤t,令ωj=[xj,yj]t表示第j个用户的位置,1≤j≤j,令表示第k个目标的位置。
15、进一步,步骤s2中,建模无人机通信信道模型,具体包括:令hj(t)∈cm×1表示t时隙无人机与第j个用户之间的通信信道增益矢量,建模为:
16、
17、其中,κ表示非视距nlos信道的衰减因子,β0表示参考距离为1m的信道功率增益,dj(t)表示无人机与第j个用户之间的距离,建模为分别表示t时隙无人机与第j个用户之间的视距los链路概率及nlos链路概率,即表示无人机与第j个用户之间的角度,表示t时隙无人机与第j个用户的阵列导向矢量,建模为表示nlos的阵列导向矢量,建模为均值为零、单位协方差矩阵的复高斯随机向量。
18、进一步,步骤s3中,建模无人机感知信道模型,具体包括:令表示t时隙无人机与第k个目标之间的感知信道增益矩阵,可建模为:
19、
20、其中,μk表示复反射系数,和分别表示无人机与第k个目标之间los链路与nlos链路概率,即表示无人机与第k个目标之间的角度,表示无人机与第k个用户的阵列导向矩阵,即其中gk(t)∈cm×1表示无人机与第k个用户的阵列导向矢量,可建模为表示nlos的阵列导向矩阵,建模均值为零和单位方差的复高斯随机变量。
21、进一步,步骤s4中,建模无人机通信感知调度变量,具体包括:令αj(t)表示t时隙无人机与第j个用户之间的调度变量,αj(t)=1表示t时隙无人机与第j个用户进行通信,反之,αj(t)=0;令表示t时隙无人机与第k个目标之间的感知调度变量,表示t时隙无人机感知第k个目标,反之,
22、进一步,步骤s5中,建模用户队列长度,具体包括:令qj(t)表示t时隙第j个用户的队列长度,可建模为:
23、
24、其中,rj(t)表示t时隙第j个用户的通信速率,建模为:
25、
26、hc(t)∈cm×j表示t时隙用户与无人机之间的信道增益矩阵,wc(t)∈cm×j表示t时隙的通信预编码矩阵,σ2表示噪声功率,λj(t)表示t时隙第j个用户随机到达的数据量,服从泊松分布,表示第j个用户的最大队列长度。
27、进一步,步骤s6中,建模无人机目标估计克拉美罗界,具体包括:无人机接收来自第k个目标的回波信号后,估计目标角度令表示t时隙估计的克拉美罗界,可表示为:
28、
29、其中,表示gk(t)对的偏导数,即
30、进一步,步骤s7中,建模无人机能耗,具体包括:令ef(t)表示t时隙无人机的飞行能耗,可建模为:其中,δf(t)∈{0,1}表示t时隙无人机的飞行变量,若δf(t)=1,t时隙无人机处于飞行状态,否则,δf(t)=0,p0、p0′分别表示无人机悬停状态叶片轮廓功率和诱导功率的常数,utip为旋翼叶片的尖端速度,v0为悬停状态下的平均旋翼诱导速度,vt为t时隙无人机的飞行速度,ξd和ξr分别为机身阻力比和旋翼可靠性,ρ和s分别为空气密度和旋翼盘面积;令eh(t)表示t时隙无人机的悬停能耗,建模为:eh(t)=δh(t)(p0+p0′)τ,其中,δh(t)∈{0,1}表示t时隙无人机的悬停变量,若δh(t)=1,t时隙无人机处于悬停状态,否则,δh(t)=0;令ec(t)、es(t)分别表示无人机通信能耗及感知能耗,可建模为ec(t)=τtr(wc(t)(wc(t))h),
31、进一步,步骤s8中,建模系统成本函数,具体包括:综合考虑用户队列长度及无人机感知性能,建模系统成本函数为最长用户队列长度与最大目标角度估计克拉美罗界的加权函数。令η(t)表示t时隙的系统成本函数,可建模为其中,β1和β2分别表示权重因子。
32、进一步,步骤s9中,建模通信感知约束及无人机轨迹约束,具体包括:任意用户在系统时间内至少通信一次,该约束可以表示为:任意时隙无人机最多与n个用户同时通信,该约束可以表示为:任意目标在系统时间内至少被感知一次,该约束可以表示为:任意时隙无人机最多感知一个目标,该约束可以表示为:用户传输速率应满足最小通信速率门限值,该约束可以表示为:其中表示第j个用户最小通信速率门限值;无人机估计目标的克拉美罗界值应小于一个阈值,以满足感知性能,该约束可以表示为:其中γth(t)表示无人机估计目标的克拉美罗界阈值;无人机通信感知的总功率不超过其最大发送功率,该约束可以表示为:其中pmax表示无人机最大发送功率;无人机的总能耗应不超过总能量,该约束可表示为:其中emax表示无人机总能量;无人机在连续两个时隙间的飞行距离应满足距离约束,该约束可以表示为:
33、进一步,步骤s10中,基于系统成本函数优化确定无人机飞行轨迹及资源分配策略,具体包括:建模系统性能度量为:将无人机轨迹及资源分配问题建模为马尔可夫决策过程mdp问题,建模系统状态、动作和收益函数;t时隙的系统状态为其中,表示t时隙的用户队列长度,er(t)表示无人机在t时隙的剩余能量,可表示为:令a(t)表示t时隙无人机的动作空间,可表示为:其中,z表示无人机在一个时隙中的飞行距离,z=vmaxτ;令r(t)表示t时隙的奖励函数,建模如下:r(t)=-η(t)-h1+h2+h3,其中,h1表示无人机电池能量耗尽的惩罚因子,h2表示系统时间内全部用户至少通信一次的奖励因子,h3表示系统时间全部目标至少被感知一次的奖励因子,基于双q网络ddqn框架及贪婪算法优化设计无人机飞行轨迹及资源分配策略,具体地,给定mdp的状态及动作,基于贪心算法确定无人机通信感知调度策略基于凸优化方法确定无人机通信及感知预编码方案wc(t)、ws(t);基于给定时隙的无人机通信感知调度策略及预编码方案wc(t)、ws(t),基于长期奖励优化确定无人机飞行轨迹
34、本发明的有益效果在于:本发明针对包含单架多天线无人机、多个用户及多个感知目标的系统场景,建模系统成本函数为优化目标,实现无人机通信感知预编码、通信感知调度策略及无人机轨迹的联合优化。
35、本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
本文地址:https://www.jishuxx.com/zhuanli/20241106/321862.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。