一种廊道混凝土点云缺陷区域分割提取方法与流程
- 国知局
- 2024-11-06 14:37:21
本发明涉及点云处理,特别是涉及一种廊道混凝土点云缺陷区域分割提取方法。
背景技术:
1、混凝土在基础设施和建筑领域扮演着至关重要的作用。随着时间推移,多种因素的影响下会造成混凝土表面出现裂缝、空洞、剥落以及内部结构不均匀等问题。这种混凝土结构因老化而损坏会影响基础设施和建筑的使用性能和寿命,并成为潜在危险。因此,对混凝土表面结构进行定量化分析并及时对混凝土表面产生的裂缝、空洞以及剥落等表观缺陷问题即时采取修复措施,对于确保混凝土结构的安全和可靠性至关重要。其中混凝土表观缺陷区域精确分割提取是混凝土缺陷监测的关键一步。混凝土表观缺陷体积增大,会导致混凝土内部钢筋外露从而氧化、腐蚀,导致钢筋强度和耐久性下降,降低混凝土结构的整体安全性。
2、缺陷区域提取主要分为传统方法与基于深度神经网络方法两个方面。
3、基于深度神经网络的缺陷区域识别方面。针对传统缺陷检测算法不适用于各种形状的标准工件缺陷问题,目前已有基于融合距离的邻近图构建的方法,提高了模型平均预测精度。针对加工零件表面缺陷检测问题,目前可通过无监督与有监督机器学习技术相结合,提高表面缺陷的识别准确率。关于点云处理方法,其可用于桥梁等基础设施的混凝土表面缺陷的语义分割,提升了检测裂缝和缺损的性能。目前可通过基于深度学习的点云分割技术实现待测量区域与非待测区域的有效分割,便于后续待测量区域的进一步量化。目前关于端到端的钢铁表面缺陷检测,可通过融合多个层次的特征,实现对缺陷的特定类别和精确定位。上述深度神经网络方法对混凝土缺陷识别上都存在数据不通用,采用混凝土缺陷数据训练结果精度不及预期等问题。
4、传统的缺陷区域识别提取方面。关于基于3d点云曲率特征的白菜表面缺陷检测,可利用曲率特征实现高精度和高适应性的缺陷检测,适用于缺陷区域曲率变化大,不适用于混凝土缺陷较为平整。还可通过注册生成管道的表面点云,运用体素采样和高斯滤波提高数据处理效率和减少噪声,利用ransac算法去除管道表面信息,有利于后续体积量化,但ransac针对不同数据存在参数难以调节且对混凝土表观这种非线性数据不太适用。
技术实现思路
1、鉴于此,本发明提供一种廊道混凝土点云缺陷区域分割提取方法。
2、本发明公开了一种廊道混凝土点云缺陷区域分割提取方法,其包括:
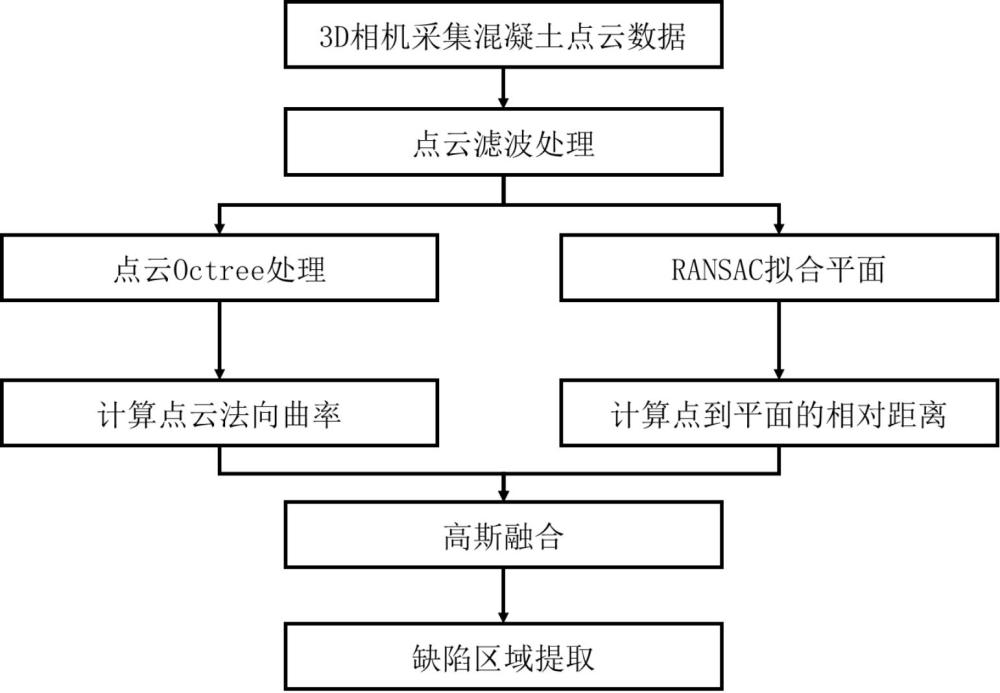
3、采集混凝土的点云数据并将其作为初始数据,通过局部曲率变化,判断出点云数据中的平面部分,然后利用每个点的法向曲率信息与点到拟合平面的距离信息进行高斯融合,最终得到缺陷区域;然后将缺陷区域进行切片,利用欧式聚类与生长区域结合的方法,并结合复杂缺陷点云切片的边界近邻关系,实现将切片轮廓分离。
4、进一步地,获取所述每个点的法向曲率的过程为:
5、对混凝土局部点云进行处理,树结构化缺陷点云数据,计算点云法向曲率。
6、进一步地,所述计算点云法向曲率,包括:
7、采用最小二乘法计算点云中每点的曲率,设点云中的任一点,点的法向量为,使用其点坐标和法向向量估计点的法向曲率。
8、进一步地,假设点邻近有个点,为点的第个邻近点,点云中点的法向量为,设正交坐标系为点的局部坐标系,其中,表示点的法向量,x和y为正交单位向量;在坐标系下,通过一个过点的密切圆估计点的法向曲率。
9、进一步地,,,的坐标分别为:
10、
11、
12、
13、其中,、、分别为的x轴坐标、y轴坐标、n轴坐标;、、分别为的x轴坐标、y轴坐标、n轴坐标。
14、进一步地,则点相对于点的法向曲率的估计值为:
15、
16、
17、其中,为向量与向量之间的夹角;为向量与向量之间的夹角;为与之间的欧氏距离,为中间变量。
18、进一步地,所述通过局部曲率变化,判断出点云数据中的平面部分,包括:
19、选取混凝土点云中曲率小于预设曲率且变化率小于预设变化率的点,采用ransac对选取的所有点拟合非缺陷区域平面,拟合平面的方程为;其中,a、b、c、d为拟合系数;、、分别为坐标系下的x轴坐标、y轴坐标、n轴坐标。
20、进一步地,所述利用每个点的法向曲率信息与点到拟合平面的距离信息进行高斯融合,包括:
21、对混凝土点云中未参与拟合平面的点,计算其到拟合平面的相对距离;记录每个点到拟合平面的相对距离,为点序号,为第个点的三维坐标;
22、
23、曲率与相对距离的加权:选择点与拟合平面相对距离和点的曲率值作为加权项,加权函数选用二维高斯函数:
24、其中,为加权函数,为点的加权值,、为点的曲率及其到拟合平面的距离;、分别控制、的加权影响范围。
25、进一步地,所述得到缺陷区域,包括:
26、根据的取值,确定缺陷区域和非缺陷区域,对缺陷区域进行底面填补,将缺陷区域转换成伪封闭区域。
27、进一步地,对初始数据进行点云滤波处理。
28、由于采用了上述技术方案,本发明具有如下的优点:
29、1、能够精确分割提取混凝土缺陷,有利于后续混凝土缺陷的体积量化。
30、2、大幅度降低了人为干预,减少了人为因素的干扰。
31、3、能够适应不同类型的缺陷形式如形变、剥落、孔洞等缺陷的分割。
技术特征:1.一种廊道混凝土点云缺陷区域分割提取方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,获取所述每个点的法向曲率的过程为:
3.根据权利要求2所述的方法,其特征在于,所述计算点云法向曲率,包括:
4.根据权利要求3所述的方法,其特征在于,假设点邻近有个点,为点的第个邻近点,点云中点的法向量为,设正交坐标系为点的局部坐标系,其中,表示点的法向量,x和y为正交单位向量;在坐标系下,通过一个过点的密切圆估计点的法向曲率。
5.根据权利要求4所述的方法,其特征在于,,,的坐标分别为:
6.根据权利要求5所述的方法,其特征在于,则点相对于点的法向曲率的估计值为:
7.根据权利要求3所述的方法,其特征在于,所述通过局部曲率变化,判断出点云数据中的平面部分,包括:
8.根据权利要求7所述的方法,其特征在于,所述利用每个点的法向曲率信息与点到拟合平面的距离信息进行高斯融合,包括:
9.根据权利要求1所述的方法,其特征在于,所述得到缺陷区域,包括:
10.根据权利要求1所述的方法,其特征在于,对初始数据进行点云滤波处理。
技术总结本发明公开了一种廊道混凝土点云缺陷区域分割提取方法,涉及点云处理技术领域,其包括:采集混凝土的点云数据并将其作为初始数据,通过局部曲率变化,判断出点云数据中的平面部分,然后利用每个点的法向曲率信息与点到拟合平面的距离信息进行高斯融合,最终得到缺陷区域;然后将缺陷区域进行切片,利用欧式聚类与生长区域结合的方法,并结合复杂缺陷点云切片的边界近邻关系,实现将切片轮廓分离。本发明能够精确分割提取混凝土缺陷,有利于后续混凝土缺陷的体积量化。技术研发人员:刘志辉,侯春尧,李永龙,夏帆,张洪毅,谭大文,周益,李文海,刘璐瑶,徐鹏,缪成宗受保护的技术使用者:三峡金沙江川云水电开发有限公司技术研发日:技术公布日:2024/11/4本文地址:https://www.jishuxx.com/zhuanli/20241106/323153.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表