用于手术机器人系统的机械权变措施双向脚踏开关的制作方法
- 国知局
- 2024-11-06 14:40:21
背景技术:
1、手术机器人系统可以包括手术控制台,手术控制台用于控制一个或多个手术机械臂,每个手术机械臂具有包括末端执行器(例如,钳或抓握器械)的手术器械。在操作时,用户通过一个或多个接口装置向手术机器人系统提供输入,用户输入被手术控制台的控制塔解读为用于移动手术机械臂的移动命令。基于用户输入,手术控制台将移动命令发送到机械臂,使得机械臂移动至患者上方的位置,并将手术器械经由患者的手术进入端口或自然孔口引导到小切口中以将末端执行器定位在患者身体内的工作部位处。
技术实现思路
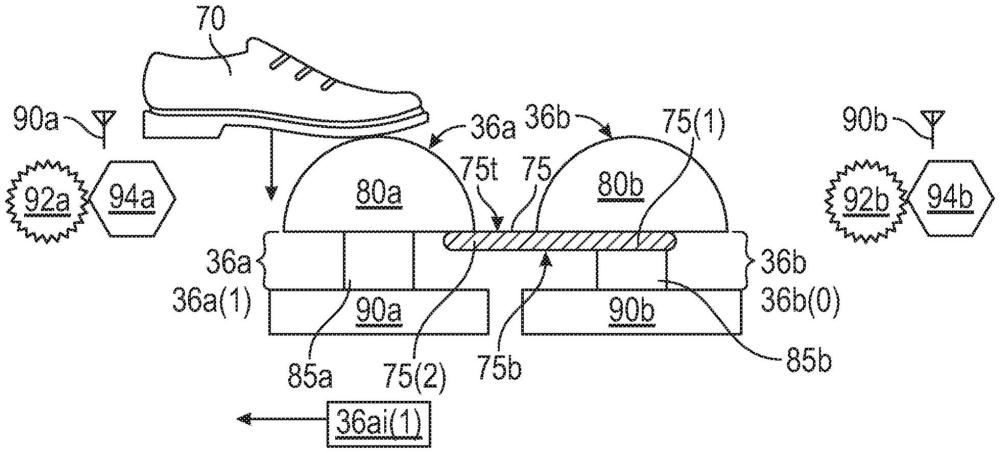
1、本披露内容描述了用于控制手术机器人系统的机械臂的移动或器械功能的装置、系统和方法。本披露内容的一个实施例是一种用于手术机器人系统的装置。该装置包括第一脚踏板,该第一脚踏板具有包括底侧的按钮。该装置包括第二脚踏板,该第二脚踏板具有包括底侧的按钮。该装置包括连接器。该连接器包括第一端、第二端、顶侧以及底侧。第一端的顶侧附接到第一脚踏板的按钮的底侧,并且第二端被配置为定位在第二脚踏板的按钮的底侧下面,以将第一脚踏板与第二脚踏板互锁。当力将第二脚踏板的按钮移动到位置时,第二脚踏板的按钮移动连接器,并且连接器将第一脚踏板的按钮移动到启动位置。
2、在各方面,第一脚踏板被配置为响应于第一脚踏板被移动到启动位置而生成输入信号,该输入信号对应于手术机器人系统的臂的移动命令或器械功能中的至少一个。
3、在各方面,第一脚踏板进一步被配置为将输入信号发送到手术控制台,该手术控制台被配置为基于第一输入信号远程控制手术机器人系统的臂或器械功能。
4、在各方面,器械功能包括血管密封、双极凝固、组织切割、吻合、单极功率水平、或超声功率水平中的至少一个。
5、在各方面,第一脚踏板被配置为响应于第一脚踏板被移动到启动位置而生成物理咔哒声。
6、在各方面,第一脚踏板包括灯,并且该灯被配置为响应于第一脚踏板被移动到启动位置而点亮。
7、在各方面,第一脚踏板包括扬声器,该扬声器被配置为响应于第一脚踏板被移动到启动位置而生成噪音。
8、在各方面,连接器包括钩、夹子、扣钩或卡扣,以将连接器与第二脚踏板的支撑柱互锁。
9、在各方面,连接器被配置为关于第一脚踏板的按钮的底侧的轴线旋转,以将第一脚踏板与第二脚踏板解锁。
10、本披露内容的另一个实施例是用于将第一脚踏板与第二脚踏板机械地互锁的系统。该系统包括第一脚踏板和第二脚踏板,该第一脚踏板包括第一按钮、第一支撑柱和第一底座,该第二脚踏板包括第二按钮、第二柱、第二底座和连接器。该连接器包括第一端、第二端、顶侧以及底侧。该连接器的第一端附接到第二脚踏板的第二按钮,并且该连接器的第二端被配置为定位在第一脚踏板的第一按钮的底侧下面,以将第二脚踏板与第一脚踏板互锁。当力将第一脚踏板的第一按钮移动到位置时,第一脚踏板的第一按钮移动连接器,并且连接器将第二脚踏板的第二按钮移动到启动位置。
11、本披露内容的另一个实施例是一种用于将手术机器人系统的第一脚踏板与该手术机器人系统的第二脚踏板机械地连接的装置。该装置包括具有第一端、第二端、顶侧和底侧的连接器。该连接器的第一端的顶侧附接到第一脚踏板的按钮的底侧,并且该连接器的第二端定位在第二脚踏板的按钮的底侧下面,以将第一脚踏板与第二脚踏板互锁。当力将第二脚踏板的按钮移动到位置时,第二脚踏板的按钮移动连接器,并且连接器将第一脚踏板的按钮移动到启动位置。
技术特征:1.一种用于手术机器人系统的装置,所述装置包括:
2.如权利要求1所述的装置,其中,所述第一脚踏板被配置为响应于所述第一脚踏板被移动到所述启动位置而生成输入信号,所述输入信号对应于所述手术机器人系统的臂的移动命令或器械功能中的至少一个。
3.如权利要求2所述的装置,其中,所述第一脚踏板进一步被配置为将所述输入信号发送到手术控制台,所述手术控制台被配置为基于所述第一输入信号远程控制所述手术机器人系统的臂或器械功能。
4.如权利要求3所述的装置,其中,所述器械功能包括血管密封、双极凝固、组织切割、吻合、单极功率水平、或超声功率水平中的至少一个。
5.如权利要求1所述的装置,其中,所述第一脚踏板被配置为响应于所述第一脚踏板被移动到所述启动位置而生成物理咔哒声。
6.如权利要求1所述的装置,进一步包括灯,所述灯被配置为响应于所述第一脚踏板被移动到所述启动位置而点亮。
7.如权利要求1所述的装置,进一步包括扬声器,所述扬声器被配置为响应于所述第一脚踏板被移动到所述启动位置而生成噪音。
8.如权利要求1所述的装置,其中,所述连接器包括钩、夹子、扣钩或卡扣,以将所述连接器与所述第二脚踏板的支撑柱互锁。
9.如权利要求1所述的装置,其中,所述连接器被配置为关于所述第一脚踏板的按钮的底侧的轴线旋转,以将所述第一脚踏板与所述第二脚踏板解锁。
10.一种用于将第一脚踏板与第二脚踏板机械地互锁的系统,所述系统包括:
11.如权利要求10所述的系统,其中,所述第二脚踏板被配置为响应于所述第二脚踏板被移动到所述启动位置而生成输入信号,所述输入信号对应于所述手术机器人系统的臂的移动命令或器械功能中的至少一个。
12.如权利要求11所述的系统,其中,所述第二脚踏板进一步被配置为将所述输入信号发送到手术控制台,所述手术控制台被配置为基于所述第一输入信号远程控制所述手术机器人系统的臂或器械功能。
13.如权利要求12所述的系统,其中,所述器械功能包括血管密封、双极凝固、组织切割、吻合、单极功率水平、或超声功率水平中的至少一个。
14.如权利要求10所述的系统,其中,所述第二脚踏板被配置为响应于所述第二脚踏板被移动到所述启动位置而生成物理咔哒声。
15.如权利要求10所述的系统,其中,所述第二脚踏板进一步包括灯,所述灯被配置为响应于所述第二脚踏板被移动到所述启动位置而点亮。
16.如权利要求10所述的系统,其中,所述连接器包括钩、夹子、扣钩或卡扣,以将所述连接器与所述第二脚踏板的支撑柱互锁。
17.如权利要求10所述的系统,其中,所述连接器被配置为关于所述第一脚踏板的按钮的底侧的轴线旋转,以将所述第一脚踏板与所述第二脚踏板解锁。
18.一种用于将手术机器人系统的第一脚踏板与所述手术机器人系统的第二脚踏板机械地连接的装置,所述装置包括:
19.如权利要求18所述的装置,其中,所述连接器包括钩、夹子、扣钩或卡扣,以将所述连接器与所述第二脚踏板的支撑柱互锁。
20.如权利要求1所述的装置,其中,所述连接器被配置为关于所述第一脚踏板的按钮的底侧的轴线旋转,以将所述第一脚踏板与所述第二脚踏板解锁。
技术总结用于控制手术机器人系统的机械臂的移动或器械功能的装置包括具有按钮的第一脚踏板、具有按钮的第二脚踏板、以及连接器。连接器包括第一端和第二端以及顶侧和底侧。第一端的顶侧附接到第一脚踏板的按钮的底侧,并且第二端被配置为定位在第二脚踏板的按钮的底侧下面,以将第一脚踏板与第二脚踏板互锁。当力将第二脚踏板的按钮移动到位置时,第二脚踏板的按钮移动连接器,该连接器随后将第一脚踏板的按钮移动到启动位置以向手术控制台发送输入信号。技术研发人员:G·J·巴雷特,S·A·马琅,R·J·斯蒂芬斯,C·E·沃尔布里奇,C·T·楚迪,D·R·金斯利,D·A·约瑟夫,J·D·艾伦受保护的技术使用者:柯惠LP公司技术研发日:技术公布日:2024/11/4本文地址:https://www.jishuxx.com/zhuanli/20241106/323477.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。