一种穿戴式运动意图识别设备
- 国知局
- 2024-11-06 14:50:41
本发明涉及意图识别领域,具体为一种穿戴式运动意图识别设备。
背景技术:
1、如今,随着人口老龄化与脑血管疾病造成的偏瘫患者的逐年增加,能为穿戴者提供诸如运动辅助、康复训练等功能的外骨骼机器人成为研究的热点,但人与外骨骼机器人的交互需要机器人主动理解人的运动意图。在疾病的影响下,患者自主控制肢体运动范围极小,传统基于程式控制的人机交互方式无法满足需求。
2、但是,目前运动意图识别的方式主要以多个方位固定摄像头采集多方位的视觉信号。由于疾病的影响,患者运动能力弱,肢体运动范围小,摄像头较难辨识较小的运动位移,使得运动意图识别成功率较低。且摄像头通过视觉信号判断运动意图需要外置设备,且摄像头的安装位置有具体要求,不适应在开放环境中使用,视觉方式的运动意图识别耗时较长,实时性低。信号采集过程也易受障碍物的遮挡等影响,设备体系复杂,应用环境受限。
3、综上,现有的运动意图识别技术主要面临的问题:1)患者肢体运动范围小,信号采集困难;2)获取的信号具有延迟,实时性低;3)信号获取设备体积大且复杂,使用场所受限。
4、因此有必要提出一款新型的运动意图识别设备及识别方法,以解决上述技术问题。
技术实现思路
1、为了克服现有技术的缺陷,本发明所要解决的技术问题在于提出一种运动意图识别设备及识别方法。在肢体运动时,通过采集设备穿戴处产生的惯性力分布情况,获取力学信息来获取肢体运动方向和大小,这种可穿戴设备无需摄像头且易于穿戴、便携方便。
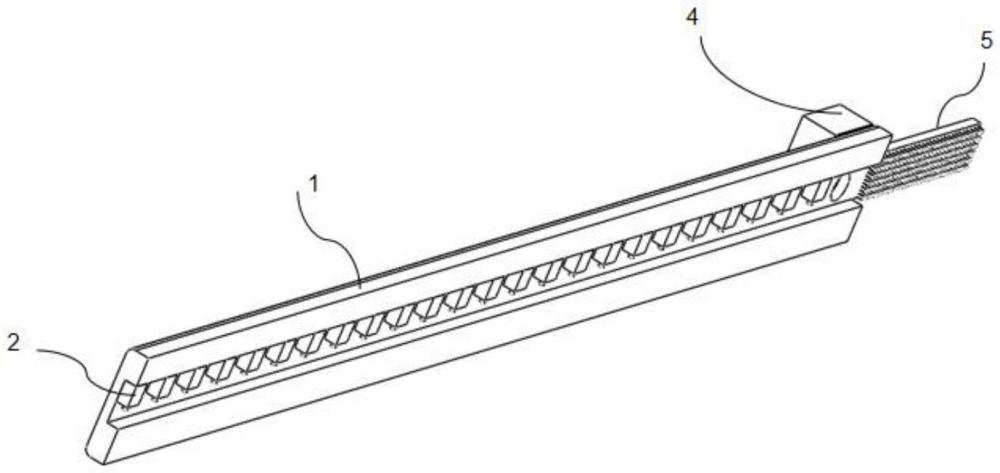
2、为达此目的,本发明采用以下技术方案:一种穿戴式运动意图识别设备,该识别设备包括:外部材料层、颗粒状压力传感器阵列、柔性接触层、主控组件、魔术贴;所述外部材料层为可弯曲的带状结构,带状结构内侧设置有顺轴线的凹槽,凹槽内设置颗粒状压力传感器阵列,然后在颗粒状压力传感器阵列上覆盖柔性接触层;颗粒状压力传感器阵列的数据线从外部材料层的外侧伸出,伸出位置设置主控组件;外部材料层的一端延伸出魔术贴;该运动意图识别设备向内弯曲,穿戴在人体关节位置的旁边,通过魔术贴粘合外部材料层的外侧,实现穿戴紧固。
3、所述主控组件中的处理方法为:
4、s1:令测试者按照指定位置穿戴运动意图识别设备采集15种运动意图数据,并将数据传送给压力传感器数据采集和预处理模块;
5、s2:压力传感器数据采集和预处理模块对数据进行预处理,得到步态信号的压力变化数据集,并从数据集中提取压力信号变化特征;同时对数据集依据预设比例划分为训练样本和测试样本;
6、s3:将得到的数据特征输入自适应增强算法的神经网络当中,训练一个运动意图识别模型;
7、s4:采用训练好的运动意图识别模型对新采集到的压力传感器数据进行识别。
8、进一步地,所述步骤s1中具体步骤包括:
9、所述颗粒状压力传感器阵列由15个压力传感器组成,令测试者按照指定位置穿戴运动意图识别设备,穿戴的位置和穿戴方式与测试时相同,所述指定位置为图3穿戴设备上的b点与a点重合;测试完毕后,令测试者以3种强度下分别进行日常生活中最常用到的5种运动模式,所述3种强度包括:在某种运动模式下实现垂直位移0-3cm、20-25cm、50-55cm;当运动意图识别设备穿戴于肘关节附近时,所述5种运动模式包括:屈肘、伸肘、抬臂、放臂、侧臂,当运动意图识别设备穿戴于膝关节附近时,所述5种运动模式包括:屈膝、伸膝、抬腿、放腿、侧腿;共得到15种强度和运动模式组合,对应15种运动意图;其中单个强度和运动模式的组合的时长为1-3秒;同时记录在静止状态时,5种运动模式返回的压力数据;
10、进一步地,所述步骤s2中数据预处理的具体步骤包括:
11、步骤2.1:将单个采样时刻的所有数据组成1x15的原始数据样本并保存初始静止状态时的数据样本作为比较信号序列;
12、
13、为第i种强度和运动模式组合下的第j个原始数据样本中的第k维原始数据,k=1,2,...15;单个强度和运动模式组合采样得到的所有原始数据样本构成的集合为
14、步骤2.2:对所有原始数据样本中的对应数据进行滤波处理后,使用自相关分析来找到原始数据样本内的周期m,去除因缠绕圈数影响而重复出现的冗余数据。
15、进一步的,所述步骤2.2的具体方法为:
16、滤波方法选择卡尔曼滤波方法,滤波后减去静止状态下的压力数据;
17、去重复操作是使用自相关分析来找到原始数据样本内的周期m,通过周期去除重叠部分的传感器压力数据,即数据样本发生改变:
18、
19、步骤2.3:将去重复后的数据样本与初始静止状态时的数据样本相减,得到压力动态变化时的数据样本。对该数据样本进行归一化处理;
20、进一步的,所述步骤2.3的具体方法为:
21、
22、式中:为第i种强度运动模式组合下的第j个原始样本的第m维原始数据归一化后的数据,为第i种步态环境组合下的第j个原始数据样本的第m维原始数据,为所有第m维原始数据的最大值,为所有第m维原始数据的最小值,表示所有第m维原始数据的均值。
23、进一步地,所述步骤s3中的运动意图识别模型包括105个强分类器,每个强分类器对应区分15种运动意图中任意两种,统计这105个强分类器的分类结果,分类结果中个数最多的运动意图作为运动意图识别模型的输出结果;每个强分类器的训练方法为:
24、步骤3.1:建立基础分类器数据库,该数据库中包含多个基础分类器;
25、步骤3.2:对全部样本赋予相同的权重,该权重表示在分类器训练时选择该样本用于分类器训练的概率;
26、
27、ωt,i为第t轮迭代时,第i个样本在分类器当中的权重,n为样本的个数;
28、步骤3.3:根据权重选择样本输入各基础分类器,计算出各基础分类器的分类错误率,错误率最低对应的基础分类器为一个弱分类器;
29、步骤3.4:若样本被全部正确分类或者超过迭代次数,强分类器训练结束;否则,进入步骤3.5;
30、步骤3.5:对样本的权重进行更新,更新方法为:
31、如果当前样本被正确分类:
32、
33、如果当前样本被错误分类:
34、
35、ωt+1,i为第t+1轮迭代时第i个样本在弱分类器当中的权重,εt为第t轮迭代时该分类器的错误率;
36、更新完成后返回步骤3.3;
37、步骤3.6:训练结束后计算择出的所有弱分类器的分类错误率,根据该错误率计算各弱分类器的权重αt,计算方法为:
38、
39、步骤3.7:该强分类器包括所有弱分类器和各分类器对应的权重,将各弱分类器的输出乘以对应权重后累加,根据累加结果判断分类结果,该分类结果为强分类器的输出。
40、与现有技术相比,本发明的有益效果为:
41、(1)当患者运动能力弱、运动范围小时,使用摄像头无法准确识别微小的运动,同时延迟性强。而本发明本身具有一定重量,即使在微小的运动下仍能产生足够的惯性力,同时因为设备穿戴在用户肢体上,实时性强,检测灵敏。
42、(2)上述可穿戴设备是通过检测运动时的惯性力,从而检测用户的运动意图。因为惯性力采集较容易,且信号噪声低,因此本发明所需要的传感器构建简单,操作方便,同时便于携带,可在户外使用。
43、(3)该设备上连接了魔术贴,使得用户在穿戴时,设备能够以一定的张力固定在肢体上。同时,手环的长度为60厘米,通过缠绕可以穿戴在手指、手臂、大腿、小腿等位置,通过重合穿戴设备上的a点以及人体穿戴位置的b点,同样可以检测这些位置的运动意图,使得该设备的可移植性强。
44、(4)多个设备可穿戴在用户的不同肢体上,通过设备上内置的姿态传感器判断各自的位置。例如在人体的手臂上,通过耦合大臂和小臂的运动意图得到手臂整体的运动意图。
本文地址:https://www.jishuxx.com/zhuanli/20241106/324422.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。