机动车辆的战术环境的建模方法与流程
- 国知局
- 2024-11-06 15:07:31
本发明涉及机动车辆环境的建模方法。本发明还涉及一种机动车辆的环境的建模设备。
背景技术:
1、智能或自动车辆需要根据其所处的情况不断地制定决策。在文献中,区分出自动汽车制定出的三个级别的决策:
2、-被称为操作决策的第一级决策,其涉及在非常有限的第一时间窗口内,例如在毫秒量级到1秒范围内,制定的决策,
3、-被称为战术决策的第二级决策,其涉及中期决策,例如在大于一秒且限制到大约10秒的时间间隔内制定的决策,
4、-被称为战略决策的第三级决策,其涉及长期决策,例如在相对于当前时刻超过10秒的时间内制定的决策。
5、操作决策基于车辆所处的近环境的精细和精确的表示被高频地制定。战略决策,就其而言,以低频被制定且只需要在可能超过一公里的范围内对车辆环境进行高粒度表示。这两种类型的环境表示,用于操作决策的精细表示或用于战略决策的高粒度表示,已经被广泛使用。而另一方面,致力于战术决策制定的环境表示不那么普遍。本发明提出对此进行补救。
6、从现有技术,特别是从us2018/0322777a1,已知实施机动车辆周围空间的占用网格的解决方案。然而这些网格具有缺点:
7、-它们对固定尺寸的区域建模,而不使建模适用于机动车辆的通行环境,或
8、-构成网格的单元只能采取三种状态:空置,已占用或未定义。
技术实现思路
1、本发明的目的是提供一种机动车辆的战术环境的建模设备和方法,其克服了上述缺点并改善机动车辆的战术环境的建模设备和方法。特别是,本发明允许实现这样的设备和方法,它们简单可靠并且使环境建模适用于车辆的通行环境,并提供特别适合战术决策制定的占用网格的单元的状态的丰富描述。
2、为此,本发明涉及一种第一自动机动车辆的战术环境的建模方法,所述战术环境指示能够影响涉及中期决策的战术决策制定的自动机动车辆的环境数据,所述第一自动机动车辆包括:
3、-感知装置组,
4、-决策模块,以及
5、-待由决策模块考虑的通行车道组的几何建模模块,
6、通行车道组包括第一序列车道,其根据在预定义的交互模式组中定义的交互模式与第一自动机动车辆通行的车道直接相互影响,和第二序列车道,其根据在预定义的交互模式组中定义的交互模式与第一序列车道相互影响,
7、所述预定义的交互模式组包括自动机动车辆保持在其通行车道上、自动机动车辆到与其通行车道相邻的车道的变道、自动机动车辆的车道与另一条通行车道的合并、自动机动车辆的车道被至少一条其他通行车道穿过之中的至少一种交互模式。
8、另外,建模方法包括:
9、-第一步骤,由几何建模模块构建第一序列和第二序列的通行车道组的几何模型,并将这些通行车道分解为相同长度的单元的组,
10、-第二步骤,基于来自所述感知装置组的数据,将所述单元组中的每个单元的第一占用状态评估为空置状态、已占用状态,或不确定状态,所述不确定状态被分配给位于所述感知装置组的视场之外的单元和/或被分配给至少部分地被位于所述第一自动机动车辆和单元之间的障碍物遮蔽的单元,
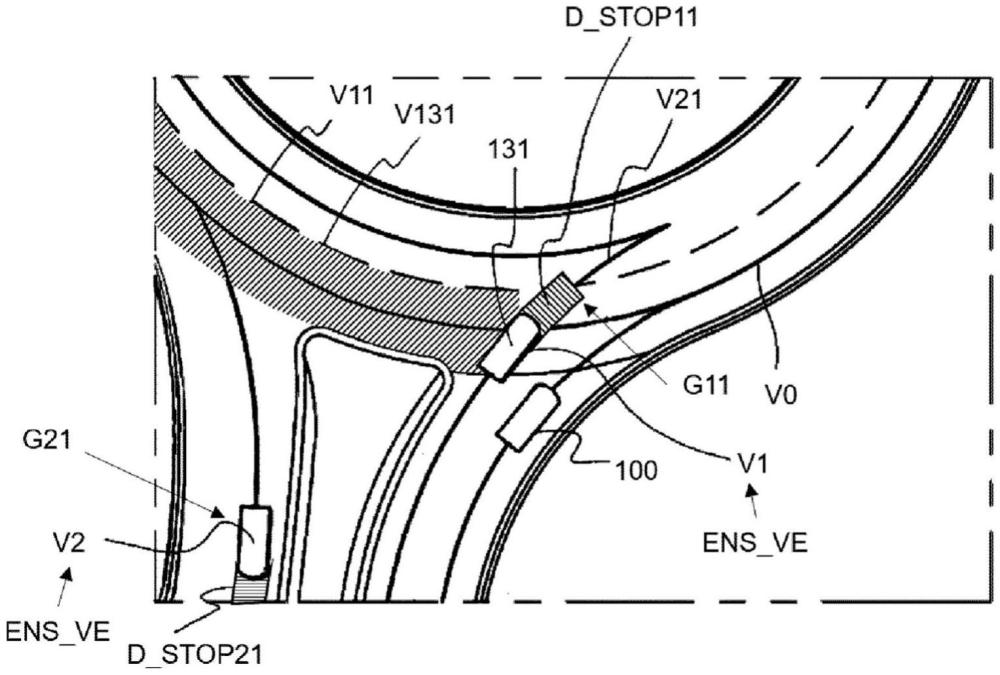
11、-第三步骤,基于来自所述感知装置组的数据,通过分析位于第二序列通行车道上的交通,定义其第一占用状态为不确定的每个指定单元的第二占用状态为中性的或安全的,其包括子步骤:如果不同于第一自动机动车辆并在第二序列车道上通行的第二车辆占据位于第一序列车道和第二序列车道交叉处且沿着第一序列车道的通行方向在所述指定单元的下游处的第一单元,将中性状态分配给所述指定单元,
12、-第四步骤,向决策模块发送包括占用状态与几何模型的每个单元的关联的环境模型,单元的占用状态如果被定义,则是第二状态,否则单元的占用状态是第一状态。
13、第三步骤,在中性状态的分配子步骤之后,可以包括将安全状态分配给指定单元的子步骤,其包括与围绕第一自动机动车辆的每台车辆相关联的紧急停止区域的确定。
14、紧急停止区的确定可包括:
15、-确定周围车辆的可能轨迹组,随后
16、-为每个可能的轨迹,
17、*计算周围车辆的停止距离及
18、*确定相邻单元群,其位于可能轨迹上,在周围车辆的前方并且与周围车辆的距离小于周围车辆的停止距离,
19、周围车辆的紧急停止区被确定为和与每条可能轨迹相关联的相邻单元群的相交处,随后
20、-将安全状态分配给紧急停止区的其第二占用状态不同于中性状态的每个单元。
21、评估该单元组的每个单元的第一状态的第二步骤可以包括该单元组和将视场覆盖的空间分配为空置区、占用区或不确定区的分配图的叠加,该分配图源自该感知装置组。
22、单元的状态可以是:
23、-被占用,如果位于所述分配图的一个或多个占用区中的单元的点的第一数量大于第一指定阈值,否则
24、-为空置,如果位于所述分配图的一个或多个被占用区中的单元的点第二数量大于第二指定阈值,否则
25、-不确定。
26、第一和第二指定阈值可以是最小点数的绝对值,或单元中包含的总点数的最小百分比。
27、分配图可以包括由多边形、占用网格或差异图表示的围绕第一自动机动车辆的空间的表示。
28、感知装置可以提供感知数据和与感知数据相关联的置信指数,并且构建几何模型的第一步骤可以包括:
29、-接收来自该感知装组置的感知数据,和与感知数据相关联的置信指数的子步骤,
30、-根据置信指数计算优化的离散化步长的子步骤,
31、-将优化的离散化步长传输到几何建模模块的子步骤,随后
32、-接收来自该几何建模模块的几何模型的子步骤,几何模型包括分解为优化长度的单元的组第一和第二序列车道组。
33、计算优化的离散化步长的子步骤可以包括:
34、-使否定的假单元的数量最小化,否定的假单元被评估为处于空置状态、中性状态或安全状态,而它实际上处于占用状态,
35、并且在可选情况下,
36、-使肯定的假单元的数量最小化,肯定的假单元被评估为处于占用状态,而它实际上处于空置状态、中性状态或安全状态。
37、本发明此外还涉及一种第一自动机动车辆的环境的建模设备,第一自动机动车辆配备有自主运动控制装置和决策模块。该设备包括实施前面定义的方法的硬件和/或软件元件。
38、本发明同样涉及一种计算机程序产品,其包括记录在计算机可读介质上的程序代码指令,用于当所述程序在计算机上运行时实施前面定义的方法的步骤。本发明同样涉及可从通信网络下载和/或被记录在计算机可读和/或可由计算机执行的数据介质上的一种计算机程序产品,其包括指令,当该程序被计算机执行时,指令引导计算机实施前面定义的方法。
39、本发明还涉及一种计算机可读的数据记录介质,其上记录有包括用于实施前面定义的方法的程序代码指令的计算机程序。本发明还涉及包括指令的计算机可读记录介质,当指令被计算机执行时,指令引导计算机实施前面定义的方法。
40、本发明还涉及一种数据载体信号,其承载前面所定义的计算机程序产品。
本文地址:https://www.jishuxx.com/zhuanli/20241106/325449.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。