一种基于多传感器融合的机动频率自适应协同定位方法
- 国知局
- 2024-11-06 14:23:28
本发明涉及一种定位方法,具体涉及一种基于多传感器融合的机动频率自适应协同定位方法,本发明属于多源异构信息融合。
背景技术:
1、信息融合技术在当前是一个比较热门的研究方向,其关联的研究内容和学科范围都较为宽广,此前被领域内相关学者广泛认可的信息融合技术定义为:将来自融合系统中的各传感器的数据进行联合、关联和组合,获得目标的身份识别和位置估计,从而实现对目标威胁和重要程度的全面评估。基于传感器技术的突破以及信息融合在理论和技术上的进步,传感器信息融合技术更泛化的表达为:将处于不同时空间的各种类型的传感器资源综合在一个系统内,融合中心将来自系统中各传感器的量测数据在融合规则下进行分析和融合,获得不同传感器节点下观测目标的一致性描述,完成目标运动状态估计以及综合决策。
2、轨迹数据的特征融合是轨迹对象的多个特征融合,可以综合考虑轨迹数据的多个特征对轨迹数据度量相似性。饶元淇特征融合轨迹相似度量方法,针对不同轨迹特征的设计不同的相似度量方法,解决一种度量方式只能针对一种轨迹特征的不足;其次,构建轨迹的相似矩阵,通过聚类方法将轨迹数据分类,给出一种基于轨迹特征融合的度量方法;丁锋提出基于韩峻峰,李玉惠所著模糊理论的目标数据关联算法,通过引入隶属度这一概念进行综合决策,通过隶属度函数值的大小判断来自多个传感器的轨迹信息是否对应同一条轨迹,从而实现不同传感器轨迹数据之间的关联判决。buede假设多个传感器的轨迹在融合中心成功的进行关联,就可将多目标跟踪问题转化为单目标跟踪。设关联成功的两条轨迹分别是轨迹i和轨迹j,轨迹i来自雷达,轨迹j为红外传感器的轨迹信息。在下面的融合中假设轨迹都已经实现关联,在各传感器的多目标中取一个目标分析即可。两传感器的预测协方差矩阵分别为p1和p2。轨迹融合的主要工作是通过融合算法得到更优的目标状态估计以及预测协方差矩阵,在进行轨迹融合时,两条轨迹的估计误差是相互独立的。张旭东,唐嘉乔,邹渊提出融合了轮式里程计、惯性测量单元、超宽带和激光雷达等多种传感器的定位数据,采用扩展卡尔曼滤波算法(extended kalman filter,ekf)和自适应蒙特-卡罗定位算法,使室内移动机器人的定位稳定性有所提高;张建帆,丁胜,陈军,提出利用扩展卡尔曼滤波器将深度视觉信息与激光雷达信息相融合,再利用贝叶斯估计法将两个传感器的信息再次融合,通过融合降低目标的冗余信息,提高环境位置构建的准确性;刘畅为确定船舶在周边环境中的位置,通过对相机、雷达和船舶自动识别系统(automatic identificationsystem,ais)进行多传感器数据融合,利用iou匹配算法将雷达与ais的位置信息和视觉感知信息融合,提高感知精度。
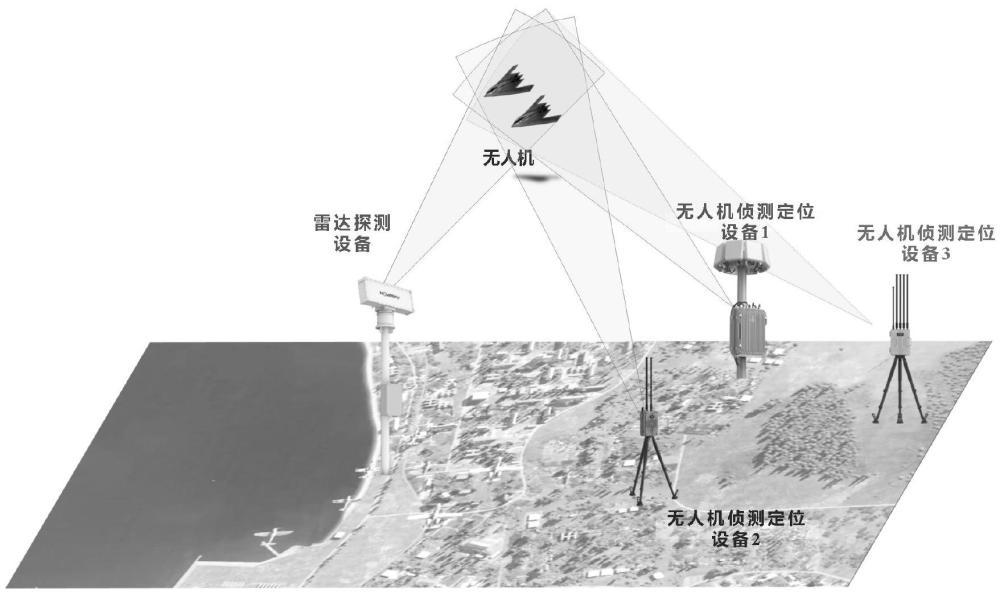
3、综上所述,随着无人机的蓬勃发展,带来诸多便利的同时各类黑飞现象层出不穷,仅依靠单部传感器对非法无人机进行跟踪面临可靠性低、易被干扰、难以全时段覆盖等缺陷,亟需一种接入多种传感器的航迹信息融合模型。然而现有的多源航迹信息融合算法对目标进行长时间跟踪与航迹生成时,依赖理想接收条件下的经验参数,但实际场景中被跟踪目标往往具备多种机动样式,导致基于经验参数的融合模型容易陷入滤波发散与航迹失真等困境。
技术实现思路
1、本发明为解决上述现有技术中存在的问题,进而提出一种基于多传感器融合的机动频率自适应协同定位方法。
2、本发明为解决上述问题采取的技术方案是:
3、本发明包括如下步骤:步骤1、使用多部传感器持续接收目标位置信息;
4、步骤2、将接收到的各类信息源航迹统一至cgcs2000地心坐标系下;
5、步骤3、将转换至统一坐标系下的各信息源航迹进行自适应频率滤波;;
6、步骤4、利用结合机动频率自适应的增强层级融合算法,将各个信息源的航迹信息进行融合,得到目标的综合航迹。
7、进一步的,步骤1中,各个传感器处在不同的空间位置且存在合作关系,每个传感器作为融合网络的节点,其接收帧率、探测精度、跟踪时长以及原始数据所处坐标系均有所差异,可以接收来自不同目标的位置信息。
8、进一步的,步骤2中,将所有传感器节点获取的位置信息传入误差转换模型,并统一转换至cgcs2000地心坐标系。
9、进一步的,步骤3中,改进的机动频率自适应auto-α模型提出一种依据目标机动的可能等级,设定多组相应的参数α和σ2,在滤波过程中依据加速度的滤波值,确定目标在当前时刻的机动等级,并设置singer模型在当前时刻对应的参数α和σ2,在之后的跟踪过程中使用新的状态方程滤波。
10、进一步的,步骤4中,模型基于多源滤波信息的层级航迹融合算法,其基本思想是从信息解耦的角度出发,通过信息图识别先验信息,进而在融合算法中删除先验信息,以避免先验信息对融合估计造成双重影响。并最终通过针对特定目标的多条信息源航迹生成综合航迹。具体包括如下步骤:
11、步骤4.1:传感器数据采集;
12、步骤4.2:航迹关联与状态估计;
13、步骤4.3:更新状态估计与协方差矩阵;
14、步骤4.4:将此过程反复迭代,直至最后收敛,求得最终目标综合航迹。
15、本发明的有益效果是:
16、1、本发明通过机动频率自适应模型改善实际场景中各类传感器接收目标运动信息与预设的目标运动模型相差较大时,由于模型参数不能及时更新导致失去对目标的实时跟踪或滤波发散,进而使得相应的融合算法精度失真的问题。
17、2、层级融合借由分布式结构实现中心式融合潜在精度的同时压缩过程变量,使整体系统最大限度的只传输各传感器的航迹及其协方差,而预测估计及其协方差交由过程模型计算,降低了系统传输量与中心处理的计算量。
18、3、增强层级融合运算效率高使其自适应频率参数更新时效性强,既实现分布式融合的运算速度又逼近中心式融合的融合精度。
技术特征:1.一种基于多传感器融合的机动频率自适应的协同定位方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种基于多传感器融合的机动频率自适应的协同定位方法,其特征在于,步骤1中,各个传感器处在不同的空间位置且存在合作关系,每个传感器作为融合网络的节点,其接收帧率、探测精度、跟踪时长以及原始数据所处坐标系均有所差异,可以接收来自不同目标的位置信息。
3.根据权利要求1所述的一种基于多传感器融合的机动频率自适应的协同定位方法,其特征在于,步骤2中,将所有传感器节点获取的位置信息传入误差转换模型,并统一转换至cgcs2000地心坐标系。
4.根据权利要求1所述的一种基于多传感器融合的机动频率自适应的协同定位方法,其特征在于,步骤3中,改进的机动频率自适应auto-α模型提出一种依据目标机动的可能等级,设定多组相应的参数α和σ2,在滤波过程中依据加速度的滤波值,确定目标在当前时刻的机动等级,并设置singer模型在当前时刻对应的参数α和σ2,在之后的跟踪过程中使用新的状态方程滤波。
5.根据权利要求1所述的一种基于多传感器融合的机动频率自适应的协同定位方法,其特征在于,步骤4中,模型基于多源滤波信息的层级航迹融合算法,通过信息图识别先验信息,进而在融合算法中删除先验信息,最终通过针对特定目标的多条信息源航迹生成综合航迹。
6.根据权利要求5所述的一种基于多传感器融合的机动频率自适应的协同定位方法,其特征在于,步骤4包括如下步骤:
技术总结一种基于多传感器融合的机动频率自适应协同定位方法,本发明用于解决现有技术中融合模型容易陷入滤波发散与航迹失真等问题,本发明包括:使用多部传感器持续接收目标位置信息,将接收到的各类信息源航迹统一至CGCS2000地心坐标系下,然后将转换至统一坐标系下的各信息源航迹进行自适应频率滤波,最终利用结合机动频率自适应的增强层级融合算法,将各个信息源的航迹信息进行融合,得到目标的综合航迹。本发明专门用于多传感器接收机动目标位置信息后,通过航迹融合网络整合为精度更高,稳定性更强的综合航迹。融合过程可充分利用各类传感器的优势航段,并且考虑机动目标的各类运动状态。本发明属于多源异构信息融合技术领域。技术研发人员:侯长波,钟告知,赵鹏旗,郭浩南,张志鹏受保护的技术使用者:哈尔滨工程大学技术研发日:技术公布日:2024/11/4本文地址:https://www.jishuxx.com/zhuanli/20241106/321762.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。