一种晶圆预对准用装载装置的制作方法
- 国知局
- 2024-11-12 13:55:49
本技术涉及电路制造,特别涉及一种晶圆预对准用装载装置。
背景技术:
1、晶圆预对准系统是半导体制造工艺中的核心组成部分,它构成了一个高度精密的子系统,专门用于在晶圆传输至各加工工位之前对其进行精确的定位和校准。这一过程对于确保后续工艺步骤如光刻、刻蚀和沉积等的精确执行至关重要。
2、在预对准阶段,系统首先会捕获晶圆上的特定标记,这些标记可能是缺口、切边或专门设计的对准图案。通过高精度的光学传感器或相机系统,装置能够测量出晶圆当前位置与理想位置之间的微小偏差。这些偏差数据随后被传输至控制系统的算法中,该算法会计算出必要的调整量,以将晶圆精确地定位到预定的坐标系中。
3、晶圆预对准的目标具有双重性:一方面,它要确保晶圆的圆心位置与加工系统的中心轴对齐,这是实现高精度加工的基础,但是这个环节一般可根据加载的绝对位置给定,因此暂不考虑。重要的是另一方面:它要确定晶圆上缺口或切边的方向,因为这一特征通常用于确定晶圆在加工过程中的方向性。
4、在执行预对准操作之前,晶圆在系统中的初始位置是未知的,其缺口方向也可能是随机的。因此,预对准系统的任务就是利用上述的测量和调整过程,将晶圆精确地调整至指定的位置和方向。这一过程的成功执行对于避免后续加工步骤中的错位和偏差至关重要。
5、在晶圆预对准系统中,驱动运动平台是实现晶圆精确定位的关键组件。然而目前的机械夹持式方法虽然直接,但由于夹持头与晶圆表面的直接接触,存在颗粒污染的风险,这可能对晶圆的清洁度造成不利影响。同时,夹持头的稳定性和可靠性也是一个潜在的挑战。
6、相比之下,真空吸附式固定方法在半导体行业中更为普遍。它依赖于晶圆背面的真空吸附力来实现固定,从而避免了与晶圆表面的直接接触。然而,这种方法也并非没有缺点。特别是当真空系统发生故障时,如气管破裂或密封失效,正在旋转的晶圆可能会突然从平台上脱落,导致晶圆损坏和加工中断。这种意外情况不仅会造成昂贵的晶圆损失,还可能对加工设备造成损害,进一步增加生产成本和停机时间。
7、传统技术的解决方式,例如cn202320980257.2所公开的晶圆预对准装置的解决方式是在晶圆的外围设置防滑落机构;当晶圆脱落时,基于防滑落机构的限位进而防止晶圆脱落。然而这种直接接触的防脱落模式容易导致晶圆的碎片;同时其为了兼顾晶圆的圆心位置的加载与防脱落,导致防滑落机构仅在晶圆的外围180°处覆盖安置防滑落机构,导致晶圆仍具有足够大的脱落空间。
8、为此,提出一种晶圆预对准用装载装置。
技术实现思路
1、有鉴于此,本实用新型实施例希望提供一种晶圆预对准用装载装置,以解决或缓解现有技术中存在的技术问题,即如何兼顾晶圆缺口在加载旋转的过程中的防脱落问题,并同时实现圆心位置与加工系统的中心轴对齐的加载与检测,并对此至少提供一种有益的选择;
2、本实用新型实施例的技术方案是这样实现的:一种晶圆预对准用装载装置,包括调节机构,所述调节机构可生成x轴向和z轴向的线性自由度;所述线性自由度生成时,驱动旋转执行件沿水平面任意方向滑动;
3、所述旋转执行件旋转驱动有吸附平台平行于所述水平面滑动,所述吸附平台上搭载有晶圆;在所述吸附平台之外以环形阵列的形式设有至少三个自适应防滑组件;
4、所述自适应防滑组件通过对缓冲件的加载和复位对所述晶圆执行防滑或送料;当所述晶圆与所述缓冲件接触时,所述缓冲件基于所述晶圆的接触方位执行自适应缓冲角度调节。
5、对于上述实施方式而言,该晶圆预对准用装载装置的实施方式具体表现在其组成部件和它们的相互作用上。装置的核心是调节机构,它能够生成x轴向和z轴向的线性自由度。这一功能通过精密的机械结构或电动马达与导轨系统实现,使得旋转执行件能够在水平面上沿任意方向滑动。旋转执行件本身是一个能够旋转的部件,它通过一定的机械连接或电磁驱动方式,带动吸附平台在水平面上平行滑动。吸附平台上设计有吸附孔或吸附垫,用于固定搭载晶圆。
6、在吸附平台的外围,以环形阵列的形式布置了至少三个自适应防滑组件。每个自适应防滑组件都包括一个缓冲件,这个缓冲件能够在加载和复位状态之间切换。缓冲件的具体形式可以是弹性材料制成的垫片、气囊或弹簧引脚等,它们能够根据晶圆的接触方位自适应地调节缓冲角度。
7、在操作过程中,首先通过调节机构驱动旋转执行件和吸附平台,使晶圆在水平面上滑动,以确定其中心位置。一旦中心位置确定,所有自适应防滑组件切换到加载状态,为晶圆提供额外的固定力。接着,旋转执行件旋转驱动吸附平台,以调节晶圆的缺口方向。如果在这个过程中晶圆有脱离的趋势,自适应防滑组件会立即响应,通过缓冲件的自适应调节来防止晶圆脱落,并对其进行缓冲。
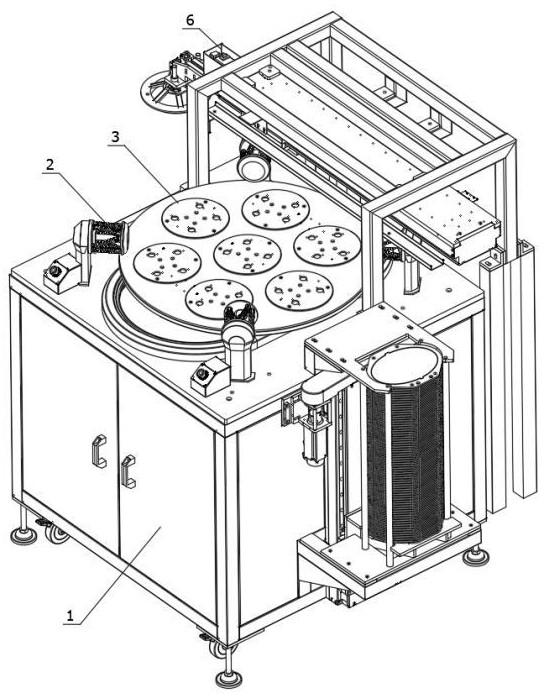
8、其中在一种实施方式中:还包括工作台,所述工作台上设有检测单元,所述检测单元的检测件用于对晶圆执行倾斜度检测;所述旋转执行件和所述吸附平台均与所述工作台的上表面平行;所述工作台上设有所述自适应防滑组件;所述调节机构设于所述工作台的内部。
9、对于上述实施方式而言,晶圆预对准用装载装置进一步整合了一个工作台。这个工作台不仅作为装置的基础支撑结构,还集成了多个关键功能部件。
10、首先,工作台的上表面设有检测单元,该检测单元配备有检测件,专门用于对晶圆执行倾斜度检测。这一功能对于确保晶圆在预对准过程中的水平性至关重要,因为任何倾斜都可能导致后续加工步骤中的精度损失。旋转执行件和吸附平台均被设计成与工作台的上表面平行。这种平行配置确保了晶圆在吸附平台上的稳定性和旋转执行件驱动的精确性。
11、吸附平台通过其吸附功能将晶圆牢牢固定在工作台上方,而旋转执行件则负责驱动吸附平台以调节晶圆的方向。自适应防滑组件也被设置在工作台上。这些组件在晶圆预对准过程中起到了双重作用:一方面,在晶圆确定中心位置和缺口方向时提供额外的固定力,防止其滑动;另一方面,在晶圆有脱落风险时,通过自适应的缓冲机制来避免损坏。
12、调节机构,作为整个装置的动力和控制核心,被安装在工作台的内部。这种布局不仅节省了空间,还提高了装置的整体刚性和稳定性。调节机构通过精密的传动机构或电动控制系统来生成x轴向和z轴向的线性自由度,从而驱动旋转执行件和吸附平台进行精确移动。
13、其中在一种实施方式中:所述调节机构包括机架及以环形阵列排布于所述机架外的至少三个用于输出所述线性自由度的线性模组;所述线性模组驱动有连接台,所述连接台的顶部搭载有旋转执行件。
14、对于上述实施方式而言,调节机构构成了晶圆预对准用装载装置的核心驱动部分。它主要包括一个机架和至少三个线性模组,这些线性模组以环形阵列的形式排布在机架的外围。
15、机架作为整个调节机构的支撑结构,具有足够的刚性和稳定性,以确保在驱动过程中不会发生不必要的振动或变形。每个线性模组都设计用于输出线性自由度,这是通过其内部的电动马达、导轨和滑块等精密部件实现的。当这些线性模组被激活时,它们能够沿x轴向和z轴向产生精确的直线运动。
16、每个线性模组都驱动有一个连接台。这些连接台不仅将线性模组的运动传递到旋转执行件,还确保了传递过程中的稳定性和精确性。连接台的顶部设计有适当的接口或连接机构,用于搭载旋转执行件。
17、旋转执行件,作为晶圆预对准过程中的关键部件,负责驱动吸附平台和晶圆进行精确的角度调节。它通过一定的机械连接或电磁驱动方式与连接台相连接,从而能够响应线性模组的驱动信号进行精确运动。
18、其中在一种实施方式中:所述线性模组包括固设于所述机架的调节电机、由所述调节电机驱动的第一臂体,以及一端和另一端分别铰接于所述第一臂体和所述连接台的第二臂体。
19、同时,工作台在与连接台之间的配合面处开设有滑槽,该滑槽宽度方向的两侧均可在连接台沿宽度方向滑动至极限点位后,滑槽宽度方向的两侧均仍抵接配合于连接台;
20、对于上述实施方式而言,当调节电机执行时,它驱动第一臂体进行进给旋转,形成线性的自由度。这个线性自由度通过第二臂体的传递被限制在连接台上,并通过上述的滑槽适配后,最终形成连接台、旋转执行件和吸附平台沿水平面任意方向的滑动。这种滑动运动为晶圆的预对准过程提供了必要的灵活性和精确性。
21、其中在一种实施方式中:所述自适应防滑组件包括第一架体和第二架体,所述第一架体固设于所述工作台上,所述第一架体和所述第二架体之间以环形阵列的形式均匀搭载有六个伸缩缸,所述伸缩缸的缸体和活塞杆分别均通过万向节联轴器万向铰接于所述第一架体和第二架体之间;所述伸缩缸的缸体外搭载有弹簧件,所述弹簧件的一端和另一端抵顶于所述第一架体和所述第二架体之间;所述第二架体上安装有所述缓冲件。
22、对于上述实施方式而言,当晶圆与缓冲件接触时,基于晶圆的接触方位所产生的力会传导至最近的一个伸缩缸及其弹簧件处。此时,伸缩缸会因受力而伸缩,同时整体第二架体也会因该伸缩缸的伸缩而产生的力而引起其余伸缩缸的适配伸缩。这种伸缩运动使得缓冲件的受力面能够沿晶圆行进方向而作偏移,从而分散晶圆产生的力并避免对晶圆产生过大的局部压力。此外,上述弹簧件在伸缩缸伸缩过程中会进行弹性压缩并进一步提供缓冲效果。这种设计不仅能够有效地吸收和分散晶圆产生的冲击力,还能够避免传统技术中因防脱落直接接触形式而对晶圆产生的碎片等技术缺陷。
23、其中在一种实施方式中:所述第一架体搭载有伺服电缸的缸体,所述伺服电缸的活塞杆通过球形联轴器铰接于所述第二架体;所述自适应防滑组件通过对缓冲件执行所述加载时,所述伺服电缸的活塞杆为伸出状态;
24、所述自适应防滑组件通过对缓冲件执行所述复位时,所述伺服电缸的活塞杆为缩回状态。
25、这种模式即避免传统防滑组件为了兼顾对晶圆的进料加载和方位缓冲功能而导致牺牲了部分缓冲空间的模式;通过对缓冲件对晶圆之间的间距执行调节,即可实现始状态下,所有自适应防滑组件处于复位状态,由调节机构对晶圆沿水平面方向滑动以确定晶圆的中心位置后,所有自适应防滑组件处于加载状态进而实现防滑防脱落的功能。
26、对于上述实施方式而言,这种设计模式避免了传统防滑组件为了兼顾多种功能而牺牲部分缓冲空间的问题。通过对缓冲件与晶圆之间的间距进行精确调节,可以实现在不同操作阶段之间灵活切换自适应防滑组件的状态。在初始状态下,所有自适应防滑组件都处于复位状态,晶圆可以自由地进入装置并由调节机构沿水平面方向滑动以确定其中心位置。一旦晶圆的位置被确定,所有自适应防滑组件都可以切换到加载状态,提供防滑防脱落的功能,确保晶圆在后续操作过程中的稳定性和安全性。
27、其中在一种实施方式中:还包括检测单元,所述检测单元安装于所述工作台上,所述检测单元的检测件用于对晶圆执行倾斜度检测。所述检测单元包括执行电机、固设于所述执行电机输出轴的滚珠丝杠的螺纹杆,以及固设于所述滚珠丝杠移动螺母上的移动台;
28、所述移动台上安装有用于对晶圆执行倾斜度检测的所述检测件。
29、所述检测件为测距传感器。当检测件根据滚珠丝杠的线性移动方向行进时,不断地检测晶圆相较于检测件的间距;当间距异常时,即代表晶圆的位置偏离,即意味着圆心位置与加工系统的中心轴非对齐,进而实现预对准的检测效果。
30、与现有技术相比,本实用新型的有益效果是:
31、一、提高加工精度和稳定性:本实用新型通过引入自适应防滑组件,本技术能够在对晶圆进行预对准时,有效地防止晶圆脱落或滑动,从而确保晶圆在加工过程中的精确对位和稳定传输。这有助于提高加工精度和产品质量。
32、二、增强系统的自适应性和灵活性:本实用新型的自适应防滑组件采用伸缩缸和弹簧件的组合设计,能够根据晶圆的实际位置和姿态进行自适应调整,确保缓冲件与晶圆之间的有效接触。同时,通过引入对缓冲件与晶圆之间间距的调节机制,进一步增强了系统的自适应性和灵活性。
33、三、调节机构的并联机构设计:本实用新型的调节机构采用了并联机构的模式实现多组自由度联动输出,相较于传统丝杠模组的多组串联联接形式,本实用新型的调节机构在保持了原预对准操作的需求性下,进一步的降低了机构的冗余度。
本文地址:https://www.jishuxx.com/zhuanli/20241112/326608.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表