起重机工作干预方法、系统及应用与流程
- 国知局
- 2024-11-18 18:16:35
本发明涉及集装箱正面起重机,尤其涉及一种起重机工作干预方法、系统及应用。
背景技术:
1、集装箱正面起重机(reach stacker),简称正面起重机,俗称集装箱正面吊或正面吊,是一种用于装卸集装箱的大型流动装卸机械,主要用于集装箱的堆叠和码头、堆厂内的水平运输。由于其具有机动灵活,操作方便,稳定性好,轮压较底,堆码层数高,堆厂利用率高等优点,在港口、铁路货场等集装箱区得到了广泛应用。
2、但是在实际作业过程中,由于现场的作业人员和设备之间频繁密切的交叉作业,司机存在视野盲区或长时间作业引起精力不集中等因素,正面吊在装卸集装箱时,易引起人机作业安全隐患,甚至发生人身伤亡事故。对此,正面吊防撞系统的开发具有重大的应用价值和现实意义。
3、传统的防撞系统及方法仅根据设定的固定距离来触发刹车系统。当正面起重机行驶速度较快或转运货物较重时,由于其运行惯性较大,正面起重机的制动距离容易超出设定的触发刹车系统的固定距离,进而导致起重机与障碍物碰撞。
技术实现思路
1、本发明的目的在于提出一种起重机工作干预方法、系统及应用,其根据正面起重机与障碍物的实时状态信息进行正面起重机工作干预,触发制动系统,能够有效降低正面起重机与障碍物发生碰撞的风险。
2、为了实现上述的技术目的,本发明所采用的技术方案为:
3、一种集装箱正面起重机工作干预方法,包括:
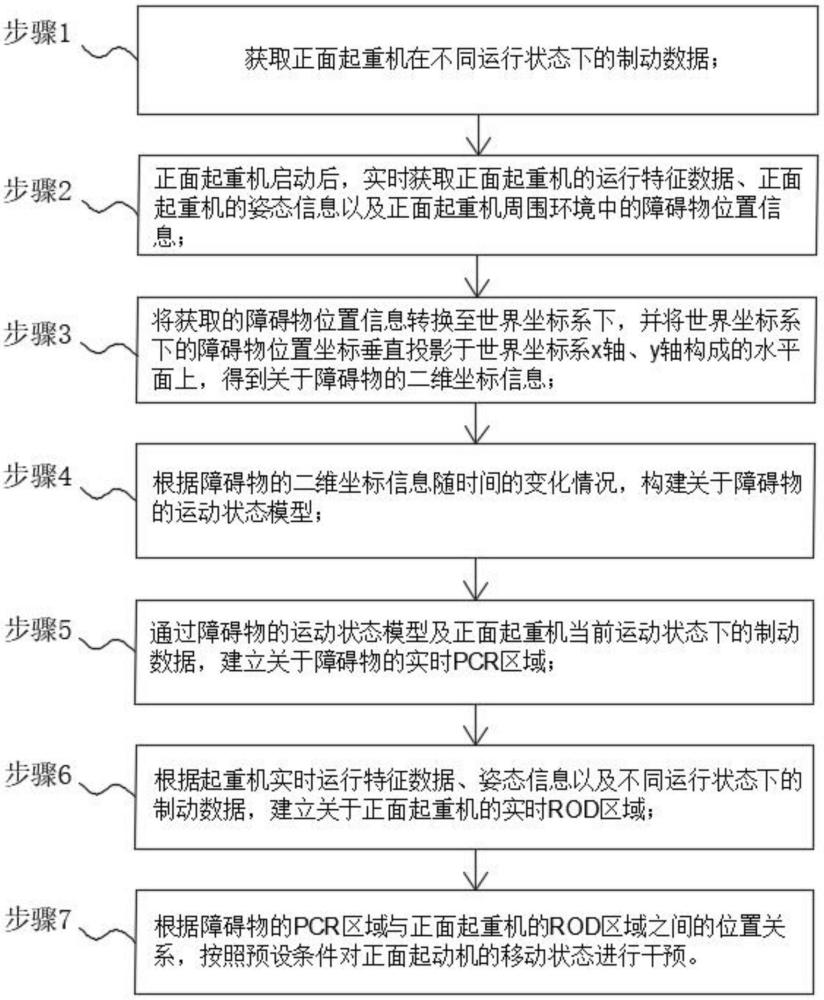
4、步骤1):获取正面起重机在不同运行状态下的制动数据;
5、步骤2):正面起重机启动后,实时获取正面起重机的运行特征数据、正面起重机的姿态信息以及正面起重机周围环境中的障碍物位置信息;其中,障碍物的定义不仅限于物体,还包含人、动物等。
6、步骤3):将获取的障碍物位置信息转换至世界坐标系下,并将世界坐标系下的障碍物位置坐标垂直投影于世界坐标系x轴、y轴构成的水平面上,得到关于障碍物的二维坐标信息;
7、步骤4):根据障碍物的二维坐标信息随时间的变化情况,构建关于障碍物的运动状态模型;
8、步骤5):通过障碍物的运动状态模型及正面起重机当前运动状态下的制动数据,建立关于障碍物的实时pcr(potential collision region)区域;
9、步骤6):根据起重机实时运行特征数据、姿态信息以及不同运行状态下的制动数据,建立关于正面起重机的实时rod(regin ofdanger)区域;
10、步骤7):根据障碍物的pcr区域与正面起重机的rod区域之间的位置关系,按照预设条件对正面起动机的移动状态进行干预。
11、作为一种可能的实施方式,进一步,步骤1)具体为:获取正面起重机在不同重量以及不同行驶速度下的制动数据;其中制动数据包括制动距离与制动时间。
12、作为一种可能的实施方式,进一步,起重机实际作业中,实时采集并存储起重机不同运行状态下的制动距离及制动时间;每间隔预设周期,根据最新采集的数据对集装箱正面起重机在不同重量及不同行驶速度下的历史制动距离及制动时间数据进行更新。
13、作为一种可能的实施方式,进一步,步骤2)中所述正面起重机的运行特征数据包括起重机重量、起重机行驶速度、起重机行驶方向、起重机制动距离以及制动时间;所述正面起重机的姿态信息包括起重臂长度l、起重臂水平倾角θ;其中,起重臂长度l为起重臂铰接点o至起重臂末端的长度距离。
14、所述障碍物位置信息通过安装于正面起重机上的360度环视系统以及雷达进行定位获取;所述360度环视系统由安装于正面起重机前、后、左、右侧的四组avm组成,所述雷达包括超声波雷达及毫米雷达。
15、作为一种可能的实施方式,进一步,步骤4)中根据障碍物的二维坐标信息随时间的变化情况,构建关于障碍物的运动状态模型,具体包括如下步骤:
16、步骤4.1):根据障碍物的二维坐标信息随时间的变化情况,构建障碍物随时间变化的移动距离模型do(t),其中do(t)的表达式如下:
17、
18、式中,xi、yi分别表示i时刻障碍物二维坐标信息中的x轴坐标以及y轴坐标;xi-1、yi-1分别表示i-1时刻障碍物二维坐标信息中的x轴坐标以及y轴坐标;
19、步骤4.2):根据移动距离模型do(t)构建关于障碍物随时间变化的运动状态模型vt,其中vt的表达式如下:
20、vt=v(t)
21、
22、式中,t(单位:秒)表示t时刻至t-1时刻的时间间隔。
23、作为一种可能的实施方式,进一步,步骤5)中通过障碍物的运动状态模型及正面起重机当前运动状态下的制动数据,建立关于障碍物的实时pcr区域,具体包括如下步骤:
24、步骤5.1):根据障碍物的运动状态模型vt,计算障碍物的运动状态模型vt在当前时刻的变化率vt’,其中vt’=v’(tnow),tnow表示当前时刻;
25、步骤5.2):根据障碍物的运动状态模型vt、障碍物的运动状态模型在当前时刻的变化率vt’与正面起重机在当前重量及当前行驶速度下的制动时间ts,获取基于当前移动速度下ts时长后障碍物的移动速度vts,其中vts的表达式如下:
26、vts=v(tnow)+vt’×ts
27、式中,v(tnow)表示当前时刻障碍物的移动速度;
28、步骤5.3):基于障碍物当前时刻移动速度、ts时长后障碍物的移动速度vts以及正面起重机在当前重量及当前行驶速度下的制动时间ts,建立关于障碍物的pcr区域;
29、所述pcr区域的建立方式为:以当前时刻障碍物的二维坐标为原点,r为半径,构建的圆形区域,得到关于障碍物的pcr区域;
30、其中,r的表达式为:
31、作为一种可能的实施方式,进一步,步骤6)中根据起重机实时运行特征数据、姿态信息以及不同运行状态下的制动数据,建立关于正面起重机的实时rod(regin ofdanger)区域,具体包括如下步骤:
32、步骤6.1):获取当前姿态下起重臂长度于水平面的垂直投影长度l,其中l的表达式如下:
33、l=l×cosθ
34、式中,l表示当前起重臂长度;θ表示当前起重臂水平倾角;
35、步骤6.2):根据起重机当前重量以及起重机当前行驶速度,获取起重机当前运行状态下的制动距离s;
36、步骤6.3):选取起重臂上的预设位置为圆心,起重臂垂直投影长度l与起重机当前运行状态下的制动距离s之和作为半径d,在水平面上构建一圆形区域,将该圆形区域定义为当前正面起重机的rod区域。
37、作为一种可能的实施方式,进一步,步骤7)中根据障碍物的pcr区域与正面起重机的rod区域之间的位置关系,按照预设条件对正面起动机的移动状态进行干预,具体包括如下步骤:
38、步骤7.1):判断当前时刻pcr区域与rod区域的半径之和(即r+d)是否大于设定的距离阈值k,若是,则执行步骤7.2),若否则执行步骤7.3);
39、步骤7.2):当当前时刻障碍物的pcr区域与正面起重机的rod区域发生重叠时,则触发制动系统进行刹停,刹停过程中刹车被完全闭合;其中,判断当前时刻障碍物的pcr区域与正面起重机的rod区域是否发生重叠的方式为:
40、判断当前时刻障碍物至起重臂上圆心间的水平距离d是否大于pcr区域与rod区域的半径之和(即r+d);若是,则判定pcr区域与rod区域未发生重叠;若否,则判定pcr区域与rod区域发生重叠。其中,刻障碍物至起重臂上圆心间的水平距离d具体为:过起重臂上圆心做竖直垂线,障碍物至该竖直垂线的垂直距离,即障碍物与起重臂上圆心间的水平距离d。
41、步骤7.3):当当前时刻障碍物至起重臂上圆心间的水平距离d小于设定的距离阈值k时,则触发制动系统进行刹停,刹停过程中刹车被完全闭合。
42、本发明还提供一种集装箱正面起重机工作干预系统,该系统应用上述集装箱正面起重机工作干预方法,其包括:
43、数据获取单元,用于实时获取正面起重机的运行特征数据、正面起重机的姿态信息以及正面起重机周围环境中的障碍物位置信息;
44、存储单元,用于存储正面起重机在不同运行状态下的制动距离数据;
45、转换单元,用于将获取的障碍物位置信息转换至世界坐标系下,并将世界坐标系下的障碍物位置坐标垂直投影于世界坐标系x轴、y轴构成的水平面上,得到关于障碍物的二维坐标信息;
46、障碍物运动状态模型构建单元,用于根据障碍物的二维坐标信息随时间的变化情况,构建关于障碍物的运动状态模型;
47、pcr构建单元,用于通过障碍物的运动状态模型及正面起重机当前运动状态下的制动数据,建立关于障碍物的实时pcr区域;
48、rod构建单元,用于根据起重机实时运行特征数据、姿态信息以及不同运行状态下的制动数据,建立关于集装箱正面起重机的实时rod区域;
49、逻辑控制单元,用于根据障碍物的pcr区域与正面起重机的rod区域之间的位置关系,按照预设条件控制制动系统对正面起动机的移动状态进行干预;
50、制动系统,用于控制正面起重机减速及刹停。
51、本发明还提供一种计算机可读的存储介质,所述的存储介质中存储有至少一条指令、至少一段程序、代码集或指令集,所述的至少一条指令、至少一段程序、代码集或指令集由处理器加载并执行实现上述集装箱正面起重机工作干预方法。
52、采用上述的技术方案,本发明与现有技术相比,其具有的有益效果为:
53、本发明提出一种起重机工作干预方法、系统及应用,其能够根据正面起重机与障碍物的实时信息,构建关于障碍物的pcr(potential collisionregion)区域及关于正面起重机的rod(regin ofdanger)区域,并根据障碍物的pcr区域与正面起重机的rod区域之间的位置关系,进行起重机的工作干预,通过预估起重机与障碍物运行状态的方式,有效降低起重机与障碍物发生碰撞的风险,适宜进一步推广应用。
本文地址:https://www.jishuxx.com/zhuanli/20241118/327966.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表