一种基于行车记录仪复用的驾驶辅助系统及方法与流程
- 国知局
- 2024-11-18 18:18:41
本技术涉及驾驶辅助技术,尤其涉及一种基于行车记录仪复用的驾驶辅助系统及方法。
背景技术:
1、自2017年起,《营运客车安全技术条件》、《机动车运行安全技术条件》、《营运车辆自动紧急制动系统性能要求和测试规程》等标准密集出台,逐步要求中大型客车、中重型载货车、牵引车安装具有车道偏离预警系统(lane departure warning,简称ldw)、自动紧急制动系统(autonomous emergency braking,简称aeb)等功能的高级驾驶辅助系统(advanced driver assistance system,简称adas)。另外,2024年5月起,交通运输行业系列标准《营运货车安全技术条件第1部分:载货汽车》(jtt 1178.1—2018)和《营运货车安全技术条件第2部分:牵引车辆与挂车》(jtt 1178.2—2019)两项标准第1号修改单已完成征求意见稿,后期aeb和ldw将成为营运货车的标配,为商用车adas市场带来了巨大的增量空间,进一步推动商用车adas系统从后装向前装市场迈进。
2、目前各大品牌的高端重卡车型主要采用“前视摄像头+毫米波雷达+驾驶员监控系统(driver monitor system,简称dms)摄像头”的技术方案,实现多种adas功能的应用,最大限度提升车辆的驾驶体验和行车安全,以期增强在市场中的竞争力。而在aeb、ldw、dms和行车记录仪成为标配的前提下,更多传感器对于商用车来说不仅会增加很大的成本,同时也会使得车身内饰显得繁杂。
技术实现思路
1、有鉴于此,本发明提供一种基于行车记录仪复用的驾驶辅助系统及方法,以解决现有技术需要同时安装设置行车记录仪功能和adas功能两套系统主机,从而导致硬件成本高,布置繁杂的技术问题。
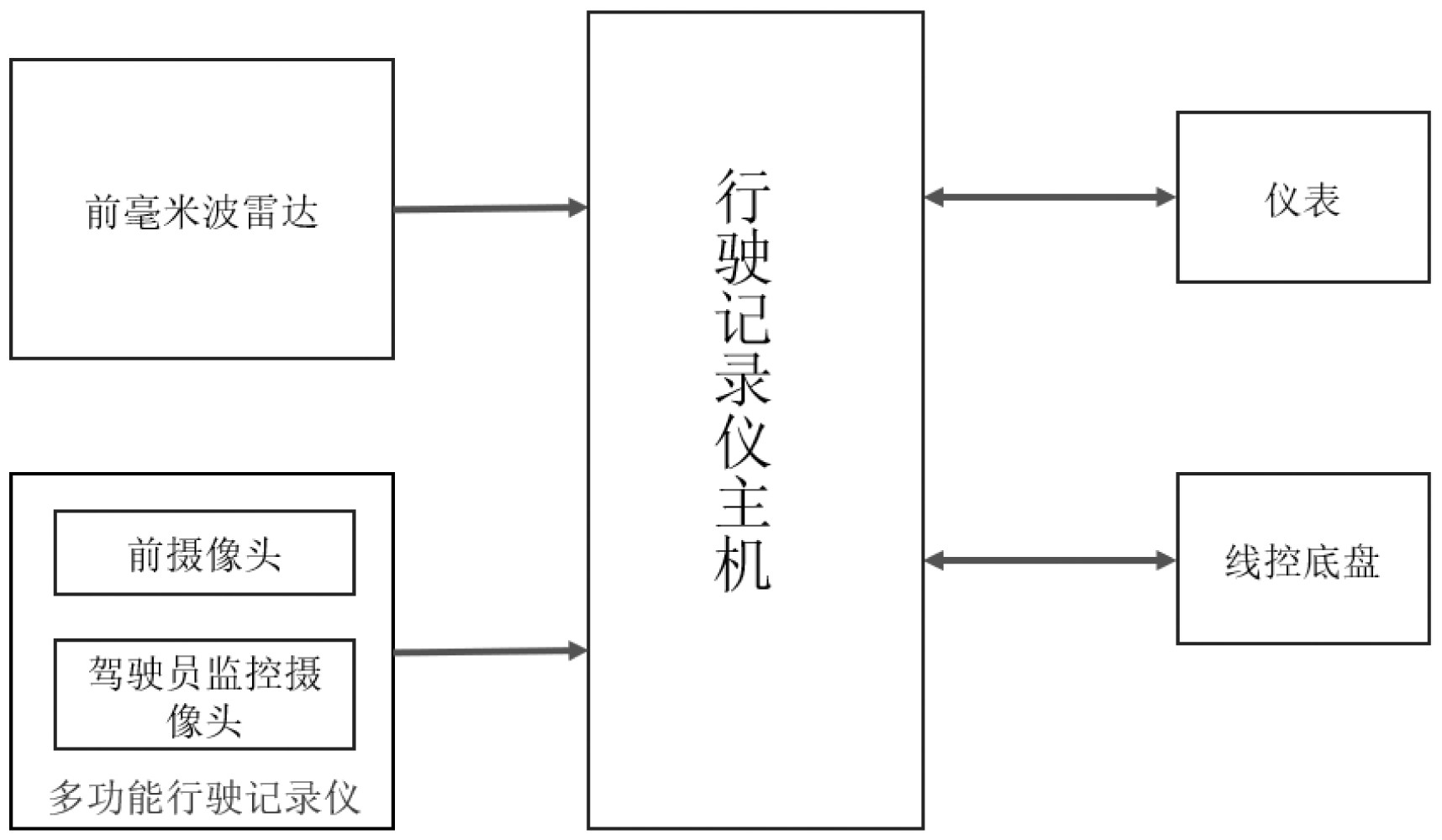
2、本发明提供一种基于行车记录仪复用的驾驶辅助系统,所述系统包括:行车记录仪,设置于车内后视镜下方挡风玻璃上,用于通过摄像头获取前方道路图像,并将图像发送至记录仪主机;前毫米波雷达,设置在车辆前格栅处,用于发射并接收雷达信号,通过处理雷达信号,获取数据信息,并将数据信息发送至记录仪主机;记录仪主机,分别与行车记录仪和前毫米波雷达相连,用于接收行车记录仪发送的图像和前毫米波雷达发送的数据信息,根据以下函数将二者进行数据融合,获得路况信息,通过can总线将路况信息发送至线控底盘和中控仪表;
3、
4、其中,r为毫米波雷达与障碍物的距离,α为毫米波雷达发射线束与障碍物的夹角,h为世界坐标系的xwo0zw平面与毫米波雷达坐标系的xrorzr平面的距离,z0为世界坐标系的xwo0yw平面与毫米波雷达坐标系的xroryr平面的距离,f为焦距,u0为像素点初始横坐标,v0为像素点初始纵坐标,u为像素点实时横坐标,v为像素点实时纵坐标,r1为旋转矩阵,t为平移矩阵,0t为三维零向量,zc为图像采集装置坐标系中的z坐标,dx为x轴方向的微分,dy为y轴方向的微分;线控底盘,通过can总线与记录仪主机相连,用于根据记录仪主机发送的路况信息的制动命令进行车辆制动;中控仪表,通过can总线与记录仪主机相连,用于根据记录仪主机发送的路况信息中的报警信息显示预警信息。
5、进一步的,所述路况信息包括前方有障碍物和车辆偏离车道。
6、进一步的,所述行车记录仪包括前摄像头和驾驶员监控摄像头,其中:所述前摄像头为角度120°的宽角摄像头,像素为800w,用于获取前方道路图像;所述驾驶员监控摄像头为角度133°的宽角摄像头,像素为200w,用于获取车辆驾驶室图像。
7、进一步的,所述行车记录仪还用于,将驾驶室图像发送至记录仪主机;所述记录仪主机还用于,通过驾驶室图像判断驾驶员状态是否为疲劳,当驾驶员状态为疲劳时,发送即将碰撞时间信息和路况信息至线控底盘和中控仪表;线控底盘还用于,当路况信息为前方道路有障碍物或者车辆偏离车道时,根据碰撞时间信息和路况信息中的制动命令提前进行车辆制动;中控仪表,根据即将碰撞时间信息和路况信息中的报警信息,显示疲劳预警信息。
8、进一步的,所述记录仪主机按照标准gbt 19056-2021《汽车行驶记录仪》记录和存储行车记录仪发送的图像数据。
9、本技术还提供一种基于行车记录仪复用的驾驶辅助方法,所述方法包括:步骤1,行车记录仪通过摄像头获取前方道路图像,并将图像发送至记录仪主机;步骤2,前毫米波雷达发射并接收雷达信号,通过处理雷达信号,获取数据信息,并将数据信息发送至记录仪主机;步骤3,记录仪主机接收行车记录仪发送的图像和前毫米波雷达发送的数据信息,根据将二者进行数据融合,获得路况信息,通过can总线将路况信息发送至线控底盘和中控仪表;
10、
11、其中,r为毫米波雷达与障碍物的距离,α为毫米波雷达发射线束与障碍物的夹角,h为世界坐标系的xwo0zw平面与毫米波雷达坐标系的xrorzr平面的距离,z0为世界坐标系的xwo0yw平面与毫米波雷达坐标系的xroryr平面的距离,f为焦距,u0为像素点初始横坐标,v0为像素点初始纵坐标,u为像素点实时横坐标,v为像素点实时纵坐标,r1为旋转矩阵,t为平移矩阵,0t为三维零向量,zc为图像采集装置坐标系中的z坐标,dx为x轴方向的微分,dy为y轴方向的微分;步骤4,线控底盘根据记录仪主机发送的路况信息中的制动命令进行车辆制动;步骤5,中控仪表根据记录仪主机发送的路况信息中的报警信息显示预警信息。
12、进一步的,所述步骤1具体为:步骤11,行车记录仪通过前摄像头获取前方道路图像;步骤12,行车记录仪通过驾驶员监控摄像头获取驾驶室图像;步骤13,行车记录仪将前方道路图像和驾驶室图像发送至记录仪主机。
13、进一步的,所述步骤3还包括,记录仪主机将即将碰撞时间信息发送至线控底盘和中控仪表;步骤4还包括,线控底盘根据即将碰撞时间信息提前进行车辆制动;步骤5还包括,中控仪表根据即将碰撞时间信息,显示疲劳预警信息。
14、进一步的,所述步骤4具体为,当路况信息为前方有障碍物时,进行车辆制动;所述步骤5具体为,当路况信息为前方有障碍物时,显示障碍物预警信息,当路况信息为车辆偏离车道时,显示车辆偏离预警信息。
15、进一步的,所述通过处理雷达信号,获取数据信息,具体为:通过比较发射信号和接收信号的差异确定数据信息,所述数据信息包括车辆周围障碍物的位置和速度。
16、本发明提供一种基于行车记录仪复用的驾驶辅助系统及方法,该技术方案通过复用行车记录仪的摄像头所获取的图像,结合前毫米波雷达获取的数据信息,有记录仪主机对二者进行数据融合,从而判断路况信息,在将其发送至线控底盘和中控仪表,以供线控底盘进行制动,以及中控仪表显示预警信息。该技术方案解决现有技术存在的同时布设行车记录仪功能和adas功能两套系统主机,导致硬度成本过高,布置繁杂的技术问题;同时增加了即使碰撞时间,提前采取制动措施,保证行驶安全及减少紧急刹车带来的不适感。
本文地址:https://www.jishuxx.com/zhuanli/20241118/328140.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。