一种边坡位移监测方法及边坡位移监测系统与流程
- 国知局
- 2024-11-18 18:20:46
本发明涉及边坡位移监测领域,具体涉及一种边坡位移监测方法及边坡位移监测系统。
背景技术:
1、边坡的位移变化通常是滑坡、崩塌等地质灾害的前兆。通过监测边坡的位移,可以及时发现异常情况,预警潜在的地质灾害,从而采取相应的措施,避免或减轻灾害带来的损失。
2、因此,位移监测作为边坡监测的关键参数,目前常采用的监测手段有gnss、全站仪、靶标图像法、连通管等,其中,全站仪精度高,配备专用软件可实现多点自动测量,但全站仪属于光学精密仪器,不适宜长期放置于野外环境中,连通管适合监测垂直位移,其测量范围较大,但测量精度易受管内空气影响,且系统维护难度较大;以上方法均不适合应用于户外大面积位移监测之中。
3、其他的靶标图像法,测量精度可达到毫米级,测量精度较高,测量频率能达到10hz以上,但是其测量范围有限,一般在200米以内。当应用于半径超过200米范围的大面积位移监测上时,需要设置有多个测点且各个测点相隔较远,多个测点之间的数据无互通性,不便于分析监测对象的变形发展情况,限制了其在边坡这种大范围位移监测应用场景上的应用。
技术实现思路
1、本发明目的在于提供一种边坡位移监测方法及边坡位移监测系统,以解决现有技术中的位移监测手段在应用于大范围边坡的位移监测时,由于监测范围交广,需要设置多个测点,但各个测点之间的监测数据难以互通,进而导致难以分析边坡的位移变形发展的情况的技术问题。
2、为了解决上述技术问题,本发明采用了如下的技术方案:
3、第一方面,本发明公开了一种边坡位移监测方法,
4、在需要位移监测的边坡表面设置监测起始点和监测目标点,并在监测起始点和监测目标点之间分别设置一个或多个中继监测点,形成依次排列的监测点序列,所述监测点序列中各个监测点之间在水平横向方向均具有间隔;然后依次以监测点序列中前序位监测点为参考点,监测相邻后序位监测点的位移变化量;然后,将测得的监测点序列中的各个位移变化量依次叠加,并结合叠加监测修正算法,对位移变化量叠加结果进行修正处理,最终得到以监测起始点为参考点时,监测目标点的位移变化量。
5、本方案的工作原理是:本方案通过在监测起始点和监测目标点之间设置多个中继监测点,能够使得监测起始点于监测目标点之间的监测数据通过各个中继监测点的监测数据实现互通,通过各个监测点序列中得到的各个位移变化量的依次传递并叠加,最终得到以监测起始点为参考点时,监测目标点的位移变化量。
6、作为优选方案,
7、作为依次以监测点序列中前序位监测点为参考点,监测相邻后序位监测点的位移变化量的其中一种实现方式,通过设置于监测起始点、监测目标点以及各个中继监测点上的图像采集装置和靶标实现,具体的布设方式为:
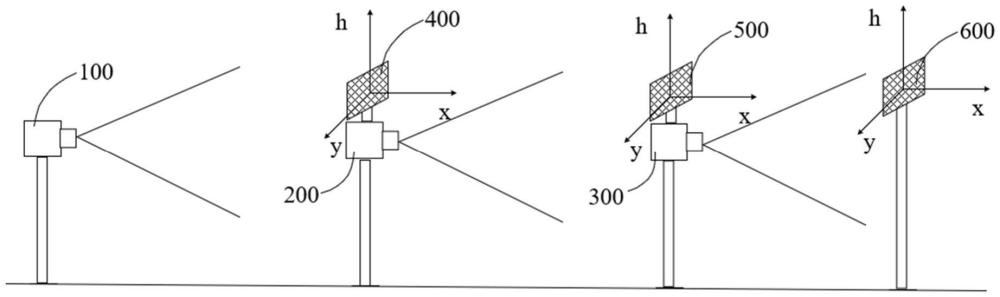
8、在监测起始点设置起始图像采集装置,在监测目标点处设置目标点靶标;在各个中继监测点分别设置中继图像采集装置以及与中继图像采集装置相对位置固定的中继靶标;在起始图像采集装置上还安装有惯性位移传感器;
9、然后依次以监测点序列中前序位中继图像采集装置为参考点,监测相邻后序位监测点的中继靶标的位移变化量;起始图像采集装置监测首个中继靶标的位移变化量;末位中继图像采集装置监测目标点靶标的位移变化量;
10、将起始图像采集装置以及各个中继图像采集装置分别测得的各个中继靶标以及目标点靶标的位移变化量进行依次叠加,并根据起始图像采集装置上的惯性位移传感器采集到的监测起始点位移变化量进行修正处理,得到监测目标点相对于监测起始点的位移变化量。
11、本方案的工作原理是:本方案通过在监测起始点和监测目标点之间设置多个中继图像采集装置和中继靶标,使得监测起始点和监测目标点之间的监测数据实现互通,在面对大面积边坡位移监测时,能够解决传统的靶标图像法的测量距离有限的技术问题,也能够解决在布设了多个测点时,测点之间的监测数据难以互通,进而导致难以分析边坡的位移变形发展的情况的技术问题。通过这种多级中继的方法,可以克服传统靶标图像法在大范围位移监测中的局限性,实现更广泛区域的精确位移监测,并且提高了数据的互通性和分析的便利性。
12、为了更加方便在实际中应用对以上位移监测方法,作为一种实施方式,监测目标点相对于监测起始点的位移变化量的表达式如下:
13、
14、式中,δ1″为监测目标点相对于监测起始点的位移变化量;δ0为以监测起始点为参考点监测到的第1个中继靶标的位移变化量δ0,δi为以第i个中继监测点为参考点监测到的第i+1中继靶标的位移变化量,其中,i∈{1,2,...,n-1},δ为以第n中继监测点为参考点监测到的目标点靶标的位移变化量,n为中继监测点的总数量;δδ0表示起始图像采集装置上的惯性位移传感器采集到的当前时刻相对于前一监测时刻的监测起始点位移变化量。
15、作为另一种实施方式,在起始图像采集装置、各个中继靶标和目标点靶标上还各自均安装有gnss设备用于进行定位监测;
16、所述位移变化量的表现形式为三维坐标值,首先以监测点序列中起始图像采集装置、各个中继靶标和目标点靶标中心为原点分别建立对应的三维坐标系,在每个三维坐标系中,均包括x轴、y轴和h轴,其中,x方向垂直于靶标平面,y方向平行于靶标,h正方向垂直于xy平面竖向向上;
17、然后在起始图像采集装置、各个中继靶标和目标点靶标各自对应的三维坐标系中,获取起始图像采集装置、各个中继靶标和目标点靶标的初始时刻t0的初始图像在各自对应的三维坐标系中的初始坐标值,以及起始图像采集装置、各个中继靶标和目标点靶标的在t0+δt时刻的变化后图像在各自对应的三维坐标系中的变化后坐标值;其中,x轴、y轴的坐标值通过gnss设备的定位监测获得,h轴的坐标值通过依次以监测点序列中前序位中继图像采集装置为参考点,监测相邻后序位监测点的中继靶标的位移变化量获得;
18、然后将各自变化后坐标值与对应的各自初始坐标值相减,分别得到各个中继靶标和目标点靶标对应的位移变化坐标值,并计算各个中继靶标和目标点靶标对应的位移变化坐标值相对于其各自对应参考点的三维坐标系的位移变化量,再将各个位移变化量相加,并结合gnss设备定位误差以及起始图像采集装置上的惯性位移传感器采集到的监测起始点位移变化量进行修正处理,得到以监测起始点为参考点时,监测目标点的位移变化量。
19、作为优选,监测目标点相对于监测起始点的位移变化量的表达式为:
20、
21、式中,δ″2为监测目标点相对于监测起始点的位移变化量;δδxj为在第j个中继靶标对应参考点的三维坐标系中,第j个中继靶标在x轴上的位移变化量,δδyj为在第j个中继靶标对应参考点的三维坐标系中,第j个中继靶标在y轴上的位移变化量,δδhj为在第j个中继靶标对应参考点的三维坐标系中,第j个中继靶标在h轴上的位移变化量,其中,j∈{1,2,...,n},n为中继监测点的总数量;δδx为在目标点靶标对应参考点的三维坐标系中,目标点靶标在x轴上的位移变化量;δδy为在目标点靶标对应参考点的三维坐标系中,目标点靶标在y轴上的位移变化量;δδh为在目标点靶标对应参考点的三维坐标系中,目标点靶标在h轴上的位移变化量,n为中继监测点的总数量;为结合gnss设备定位误差以及起始图像采集装置上的惯性位移传感器采集到的监测起始点位移变化量的修正量,且:
22、
23、其中,δδh0表示起始图像采集装置上的惯性位移传感器采集到的当前时刻相对于前一监测时刻的监测起始点在h轴上的位移变化量;分别为各个中继靶标和目标点靶标在x轴、y轴上的位移变化量均值,即:
24、
25、为了进一步提高位移监测的精度,作为优选,利用gnss设备实时获取起始图像采集装置、各个中继图像采集装置、各个中继靶标以及目标点靶标的位置坐标,并记录时间戳;
26、将同一时间的各个中继图像采集装置与对应的各个中继靶标的水平方向的位置坐标进行对比,并将初始时刻t0与t0+δt时刻的各个中继靶标以及目标点靶标的位置坐标进行计算,得到各个中继靶标以及目标点靶标在水平方向真实的位移变化坐标值,然后对之前得到的各个中继靶标和目标点靶标对应的位移变化坐标值进行修正;
27、再将修正后的各个中继靶标和目标点靶标对应的位移变化坐标值相加,得到以监测起始点为参考点时,修正后的监测目标点的位移变化坐标值。
28、为了进一步提高位移监测的准确度,作为优选,根据不同的温度和湿度,设置用于监测位移变化量的对照组,并得到温度和湿度修正因子,在得到各个中继靶标以及目标点靶标的位移变化量后,根据实际的温度和湿度,通过对应的温度和湿度修正因子对每个中继靶标以及目标点靶标的位移变化量进行修正,得到修正后的各个中继靶标以及目标点靶标的位移变化量。
29、作为优选,在需要位移监测的边坡表面设置监测起始点和监测目标点之前,还需要首先在边坡表面确定监测范围,并在监测范围内规划多条监测线,并分别在每条监测线上设置各自对应的监测起始点和监测目标点;各个监测线按照线性布设、网格布设或扇形布设的方式布设。在边坡表面规划多条监测线,可以根据不同的需求选择线性布设、网格布设或扇形布设,提高监测的系统性和有效性。
30、第二方面,本发明还公开了一种边坡位移监测系统,用于实现如上所述的边坡位移监测方法,包括设置于监测起始点的起始图像采集装置和设置于监测目标点的目标点靶标,所述监测起始点和监测目标点分别设置于需要位移监测的边坡表面;
31、在监测起始点设置起始图像采集装置,在监测目标点处设置目标点靶标;在各个中继监测点分别设置中继图像采集装置和中继靶标,且保证中继靶标与对应的中继图像采集装置的位置相同且一一对应;
32、各个中继靶标自靠近起始图像采集装置的中继靶标起依次排列为第一序列,各个中继图像采集装置自起始图像采集装置起依次排列为第二序列;
33、所述起始图像采集装置用于监测第一序列中的首位中继靶标的位移变化量;
34、所述第二序列中的末位中继图像采集装置用于监测目标点靶标的位移变化量;
35、所述第二序列中的前序中继图像采集装置用于监测第一序列中的相邻后序中继靶标的位移变化量。
36、本方案的工作原理是:本方案中,首先采用起始图像采集装置监测第一序列中的首位中继靶标的位移变化量,采用第二序列中的末位中继图像采集装置监测目标点靶标的位移变化量;采用第二序列中的前序中继图像采集装置监测第一序列中的相邻后序中继靶标的位移变化量;将起始图像采集装置以及各个中继图像采集装置分别测得的各个中继靶标以及目标点靶标的位移变化量进行依次叠加,得到监测目标点相对于监测起始点的位移变化量;本方案通过在监测起始点和监测目标点之间设置多个中继图像采集装置和中继靶标,使得监测起始点和监测目标点之间的监测数据实现互通,在面对大面积边坡位移监测时,能够解决传统的靶标图像法的测量距离有限的技术问题,也能够解决在布设了多个测点时,测点之间的监测数据难以互通,进而导致难以分析边坡的位移变形发展的情况的技术问题。通过这种多级中继的方法,可以克服传统靶标图像法在大范围位移监测中的局限性,实现更广泛区域的精确位移监测,并且提高了数据的互通性和分析的便利性。
37、作为优选,目标点靶标以及各个中继靶标呈板状且相互之间平行排布。这样能够使位移变化量在相加或者想减时,具有同样的计算标准,保证结果的准确率。
38、本发明具有以下有益效果:边坡位移监测方法通过在监测起始点和监测目标点之间设置多个中继监测点,能够覆盖更广的监测区域,尤其适用于大范围的边坡位移监测;中继监测点的设置实现了监测数据的逐级传递和叠加,增强了不同监测点数据之间的互通性,便于集中分析和处理,并通过数学表达式的形式推导出位移变化量,简化了数据处理过程,便于快速得到监测结果,解决了现有技术中的位移监测手段在应用于大范围边坡的位移监测时,由于监测范围交广,需要设置多个测点,但各个测点之间的监测数据难以互通,进而导致难以分析边坡的位移变形发展的情况的技术问题,能够实现更广泛区域的精确位移监测,并且提高了数据的互通性和分析的便利性。
本文地址:https://www.jishuxx.com/zhuanli/20241118/328327.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。