一种链斗式连续卸船机控制方法与液压系统与流程
- 国知局
- 2024-11-21 11:34:24
本发明涉及链斗式连续卸船机的液压控制系统的,具体而言,尤其涉及一种链斗式连续卸船机控制方法与液压系统。
背景技术:
1、随着码头建设大型化、专业化的发展,以及科学技术不断进步、港口装备设计制造水平不断提高,散货码头的卸船设备也不断在进行升级换代。大型港口卸船设备的高效稳定作业对提高卸船效率、降低卸船成本、缩短船舶停港时间起着决定性作用。
2、链斗式连续卸船机为用链斗兼顾取料和提升,物料由斗式提升机连续提升,链斗将物料卸至回转给料盘,回转给料盘旋转给料至臂架带式输送机进行物料水平输送。
3、目前链斗式连续卸船机在取料时主要是靠司机观察取料头与料仓的高度,进而手动操作臂架俯仰液压缸控制取料提升系统上升或下降,存在观察不准确,取料多少受司机操作水平影响等问题。
4、目前链斗式连续卸船机取料头通过臂架俯仰液压缸控制上升或下降,臂架俯仰液压控制回路一般采用开式回路阀控系统,或半闭式回路与阀控相结合,设计比较复杂且容易出现节流损失,运行不平稳、故障多等问题。臂架俯仰液压系统采用闭式系统,比例闭式泵直接对取料提升系统工作速度进行无级调速,设计有补油泵根据油缸伸缩工况补充油缸两腔流量差,同时通过设置多个传感器分别获取油缸两腔的压力等信息,从而能够有效的实现对控制系统的监测,避免事故发生。同时,比例闭式泵出口设计有比例溢流阀适应不同工况工作压力要求,同时通过监测比例溢流阀工作过程中的相关数据进而实现对整个工作的控制。
5、已申请文件公开号为:cn114412861a公开了一种连续卸船机臂架俯仰液压系统及工作方法,其公开的方法主要是针对续卸船机臂架俯仰液压系统的液压控制,并不能解决现有技术中存在的观察不准确,取料多少受司机操作水平影响等问题。
技术实现思路
1、根据上述提出观察不准确,取料多少受司机操作水平影响等问题的技术问题,而提供一种链斗式连续卸船机控制方法与液压系统。本发明提供一种链斗式连续卸船机液压控制方法与系统。通过扫描识别系统扫描物料,获取物料图像,并获取物料的高度、船舱深度,将扫描的模型传至控制系统中,通过设置在控制系统中的预处理分析系统进行分析生成取料头预动作路径,反馈给臂架俯仰液压系统,取料头上升或下降可实现自动控制,提高生产效率。
2、本发明采用的技术手段如下:
3、一种链斗式连续卸船机控制方法,包括以下步骤:
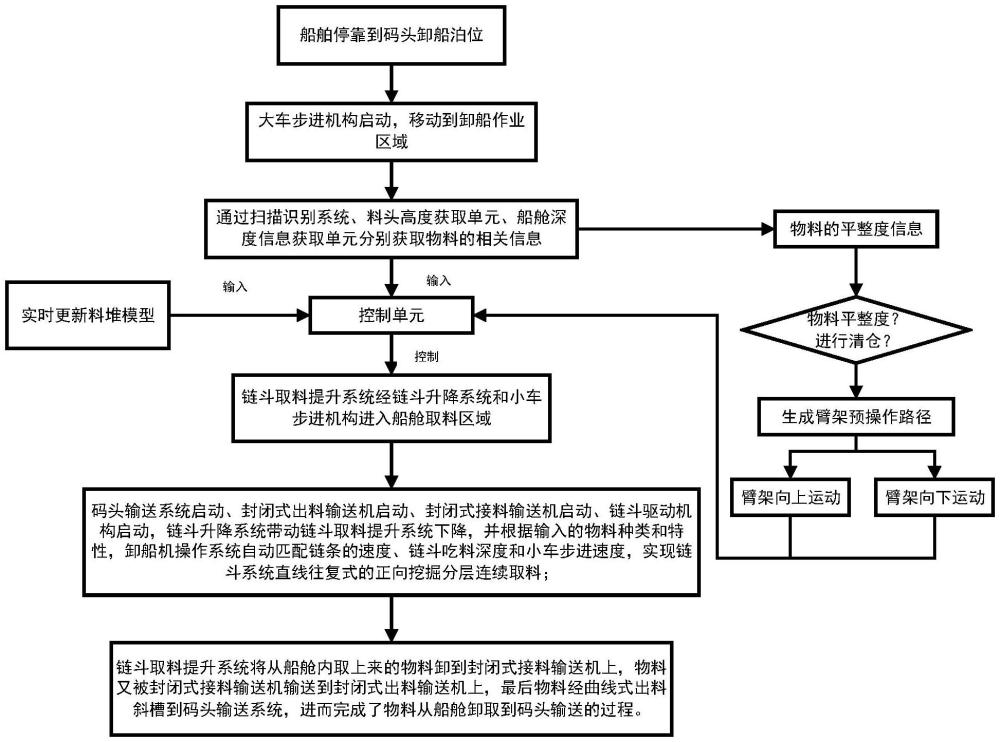
4、步骤一:船舶停靠到码头卸船泊位;
5、步骤二:大车步进机构启动,移动到卸船作业区域;
6、步骤三:通过扫描识别系统、料头高度获取单元、船舱深度信息获取单元获取物料的相关信息,并将获取的相关信息反馈至控制单元中,生成物料的平整度信息;
7、步骤四:通过判断物料整体高度、取料头距离物料的高度、物料的平整度以及船舱的深度,生成臂架预操作路径即臂架需要向上运动还是向下运动,并将预操作路径反馈至液压控制系统;
8、步骤五:链斗取料提升系统经链斗升降系统和小车步进机构进入船舱取料区域,由液压控制系统配合执行取料任务;
9、步骤六:在执行取料任务同时,保持对舱内料堆扫描,并实时更新料堆模型;
10、步骤七:根据所述步骤六获取的更新后的料堆模型,判断当前料堆模型状态,将料堆状态反馈至所述控制单元中,进一步生成臂架预操作路径即臂架需要向上运动还是向下运动,并将控制信号传送至所述液压控制系统中,完成臂架预操作路径的更新;
11、步骤八:码头输送系统启动、封闭式出料输送机启动、封闭式接料输送机启动、链斗驱动机构启动,链斗升降系统带动链斗取料提升系统下降,并根据输入的物料种类和特性,卸船机操作系统自动匹配链条的速度、链斗吃料深度和小车步进速度,实现链斗系统直线往复式的正向挖掘分层连续取料;
12、步骤九:链斗取料提升系统将从船舱内取上来的物料卸到封闭式接料输送机上,物料又被封闭式接料输送机输送到封闭式出料输送机上,最后物料经曲线式出料斜槽到码头输送系统,进而完成物料从船舱卸取到码头输送的过程。
13、进一步地,所述相关信息包括:料物的整体图像、船舱深度、料头距离料物顶端的距离以及物料平整度。
14、进一步地,当臂架向下运动时,所述液压控制系统控制俯仰油缸伸出,带动取料提升系统向下运动;当俯仰油缸伸出时,平衡梁将绕中部固定铰点旋转,前铰点向下运动,带动顶部结构向下运动;
15、为了确保顶部结构在铅垂方向向下运动,臂架在顶部结构的作业下同时绕根部铰点旋转向下,通过平行四边形结构形式实现取料提升系统的垂直向下运动;
16、进一步地,当臂架向上运动时,所述液压控制系统控制俯仰油缸缩回,带动所述取料提升系统向上运动;当俯仰油缸缩回时,平衡梁将绕中部固定铰点旋转,前铰点向上运动,带动顶部结构向上运动;
17、为了确保顶部结构在铅垂方向向上运动,臂架在顶部结构的作业下同时绕根部铰点旋转向上,如此通过平行四边形结构形式实现取料提升系统的垂直向上运动。
18、进一步地,所述臂架预操作路径包括:料面不平整路径、料面平整路径以及进行清仓路径。
19、进一步地,通过所述扫描识别系统获取的物料信息判断为料面不平整,则执行料面不平整路径;当执行所述料面不平整路径时,通过臂架俯仰,即控制臂架向上运动或向下运动,以调整取料的深度。
20、进一步地,通过所述扫描识别系统获取的物料信息判断为料面平整,则执行料面平整路径;当执行所述料面平整路径时,通过臂架俯仰,完成取料深度的确定后,臂架俯仰不再动作,完成一层物料的挖取,当这一层完成卸载后,臂架再次动作,继续下降,完成第二层物料的卸载。
21、进一步地,通过所述扫描识别系统获取的物料信息判断为清舱,则执行清舱路径,通过判断船舶顶升力是否超过预设值,进而控制臂架俯仰。
22、本发明还包含一种链斗式连续卸船机控制系统,包括:链斗提升模块、回转模块、行走模块以及控制单元;
23、所述链斗提升模块设置在臂架头部的l型框架上;
24、所述回转模块包括:臂架、配重梁结构与回转结构;
25、所述行走模块包括:门座、海侧门腿以及陆侧门腿;
26、所述链斗提升模块通过液压控制系统实现俯仰运动;所述臂架及配重梁均通过液压油缸实现俯仰运动;
27、在所述链斗提升模块上设置有扫描识别系统、料头高度获取单元、船舱深度信息获取单元;对船舱口位置监测、船舱纵深、取料头进入船舱高度信息进行获取,并将获取后的信息传输给控制单元中,并由控制单元控制所述链斗提升模块的运动;
28、所述控制单元根据所述扫描识别系统、料头高度获取单元、船舱深度信息获取单元获取的相关信息进行处理,根据处理后的信息生成臂架预操作路径。
29、进一步地,所述臂架预操作路径包括:料面不平整路径、料面平整路径以及进行清仓路径。
30、较现有技术相比,本发明具有以下优点:
31、本发明提供一种液压控制方法与液压系统通过设置图像采集单元、料头高度获取单元、船舱深度信息获取单元实现了对货物的信息获取,同时通过设置扫描识别系统,通过扫描料堆信息,提前对液压系统实现预处理分析,生成预处理路径,有效的实现无人化的液压控制,更好的配合实现物料的取送。
本文地址:https://www.jishuxx.com/zhuanli/20241120/331831.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表