基于C-V2X与单车智能的融合优化自动驾驶功能的系统及方法与流程
- 国知局
- 2024-11-21 11:44:03
本发明涉及车辆自动驾驶领域,具体地,涉及一种基于c-v2x与单车智能的融合优化自动驾驶功能的系统及方法。
背景技术:
1、随着汽车产业的快速发展,交通安全问题日益突出,交通事故居高不下,给社会带来了巨大的生命和财产损失。目前,单一的单车智能在智能驾驶感知和决策控制层面存在局限性,包括:无超视距感知能力受光线、天气影响大,跟踪车辆数有限,无法感知路口横向车辆,无法感知远处有遮挡的对向车辆;缺乏基于上帝视角的道路全局信息,无法感知被遮挡的弱势交通参与者,无法感知路面异常信息;仅基于算法识别目标,无法获知红绿灯相位剩余时间,无法获知车辆刹车、方向盘转角等内部信息,误识别长尾效应明显;无协作能力,无法满足涉及路权分配等需要协作的场景。同时,单车智能在决策控制层面需要依赖自身算法理解交通规则和交通参与者行为,难以准确获知交通参与者行为意图,难以实现群体协作。
2、因此,提高道路交通安全性,减少交通事故的发生,成为了迫切的需求。同时,随着智能化技术的不断进步,人们对于汽车智能化、自动化的期望也在不断提升。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种基于c-v2x与单车智能的融合优化自动驾驶功能的系统及方法,将c-v2x与其他车辆、行人、交通基础设施以及网络进行交互获得的信息与通过单车智能技术获得的信息进行融合,根据二者的综合信息进行决策,优化车辆的自动驾驶功能。
2、为实现上述发明目的,本发明提供如下所述技术方案:
3、一种基于c-v2x与单车智能的融合优化自动驾驶功能的系统,所述系统包括单车智能模块、c-v2x通信模块以及融合决策与控制模块;
4、所述单车智能模块上部署有传感器,用于获取车辆周围环境信息;
5、所述c-v2x通信模块包括v2x-adas融合域控制器和输入/输出组件;所述v2x-adas融合域控制器包括v2x通讯模组、hsm硬件安全模块、感知soc和mcu微控制单元;所述输入/输出组件包括摄像头、毫米波雷达、电子控制单元、t-box车载远程信息处理终端、p-box定位盒子和hmi人机交互模块;
6、c-v2x通信模块在运行时,来自外部的pc5接口提供v2x通信信号,传入v2x通信模组,v2x通信模组将接收到的信息进行处理,与mcu微控制单元进行数据交互;mcu微控制单元根据融合后的信息生成控制指令,实现车辆的转向、制动和动力控制;感知soc通过摄像头和毫米波雷达获取环境信息,辅助主控mcu的决策过程;车辆信息通过hmi人机交互模块呈现给驾驶员,并可通过t-box车载远程信息处理终端和p-box定位盒子与外部系统进行进一步的交互;
7、所述融合决策与控制模块配置有计算单元,并通过数据融合算法以及决策与控制算法处理来自单车智能模块和c-v2x通信模块的数据,执行融合算法和决策控制逻辑。
8、优选地,通过所述系统可以实现车辆的提示、预警和控制功能。
9、优选地,实现所述提示功能时,主车obu车载单元通过pc5接口获取路侧单元以及远车obu车载单元传递的信息,并结合车内gnss全球导航卫星系统和惯导定位装置提供的信息作出提示,通过hmi人机交互模块反馈给驾驶员。
10、优选地,实现所述预警功能时,主车obu车载单元通过pc5接口获取路侧单元以及远车obu车载单元传递的信息,并将信息传递给智能驾驶计算平台,智能驾驶计算平台结合车内gnss全球导航卫星系统、惯导定位装置提供的信息以及传感器信息作出预警,并通过hmi人机交互模块与驾驶员进行交互。
11、优选地,实现所述控制功能时,主车obu车载单元通过pc5接口获取路侧单元以及远车obu车载单元传递的信息,并将信息传递给智能驾驶计算平台,智能驾驶计算平台结合车内gnss全球导航卫星系统、惯导定位装置提供的信息以及传感器信息,与高精度地图以及hmi人机交互模块进行交互,并控制vcu汽车电子控制单元、eps电子助力转向系统、esc车身电子稳定控制系统执行对应操作。
12、一种基于c-v2x与单车智能的融合优化自动驾驶功能的方法,采用了上述任一所述的基于c-v2x与单车智能的融合优化自动驾驶功能的系统,方法包括:
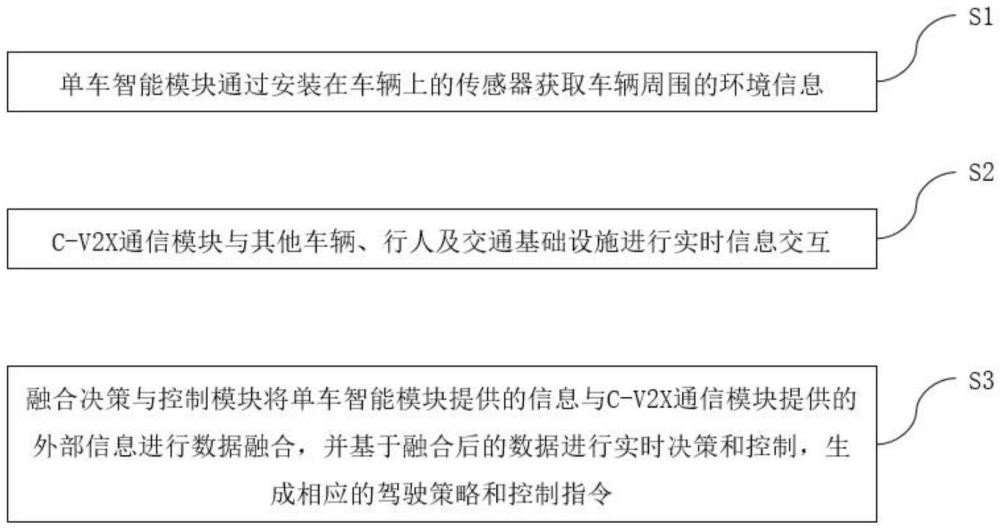
13、s1:单车智能模块通过安装在车辆上的传感器获取车辆周围的环境信息;
14、s2:c-v2x通信模块与其他车辆、行人及交通基础设施进行实时信息交互;
15、s3:融合决策与控制模块将单车智能模块提供的信息与c-v2x通信模块提供的外部信息进行数据融合,并基于融合后的数据进行实时决策和控制,生成相应的驾驶策略和控制指令。
16、根据本发明提供的基于c-v2x与单车智能的融合优化自动驾驶功能的系统及方法,通过融合决策与控制模块将单车智能模块获取的环境信息与c-v2x通信模块提供的外部信息进行数据融合,并基于融合后的数据进行实时决策和控制,生成相应的驾驶策略和控制指令,使得车辆可以获取更全面、更准确的道路信息,实现车辆对周围环境的全面感知,提高了行车安全性和效率。
17、与现有技术相比,本发明基于c-v2x与单车智能的融合,车辆可以在综合考虑环境信息和自车与周围的车、人、交通基础设施以及网络等外部信息情况下,进行决策和控制,进一步扩展了单车智能的功能和应用范围,使车辆在复杂的交通环境中具有更强的感知、决策和执行能力,实现更高级别的自动驾驶功能。
技术特征:1.一种基于c-v2x与单车智能的融合优化自动驾驶功能的系统,其特征在于,所述系统包括单车智能模块、c-v2x通信模块以及融合决策与控制模块;
2.根据权利要求1所述的基于c-v2x与单车智能的融合优化自动驾驶功能的系统,其特征在于,通过所述系统可以实现车辆的提示、预警和控制功能。
3.根据权利要求2所述的基于c-v2x与单车智能的融合优化自动驾驶功能的系统,其特征在于,实现所述提示功能时,主车obu车载单元通过pc5接口获取路侧单元以及远车obu车载单元传递的信息,并结合车内gnss全球导航卫星系统和惯导定位装置提供的信息作出提示,通过hmi人机交互模块反馈给驾驶员。
4.根据权利要求2所述的基于c-v2x与单车智能的融合优化自动驾驶功能的系统,其特征在于,实现所述预警功能时,主车obu车载单元通过pc5接口获取路侧单元以及远车obu车载单元传递的信息,并将信息传递给智能驾驶计算平台,智能驾驶计算平台结合车内gnss全球导航卫星系统、惯导定位装置提供的信息以及传感器信息作出预警,并通过hmi人机交互模块与驾驶员进行交互。
5.根据权利要求2所述的基于c-v2x与单车智能的融合优化自动驾驶功能的系统,其特征在于,实现所述控制功能时,主车obu车载单元通过pc5接口获取路侧单元以及远车obu车载单元传递的信息,并将信息传递给智能驾驶计算平台,智能驾驶计算平台结合车内gnss全球导航卫星系统、惯导定位装置提供的信息以及传感器信息,与高精度地图以及hmi人机交互模块进行交互,并控制vcu汽车电子控制单元、eps电子助力转向系统、esc车身电子稳定控制系统执行对应操作。
6.一种基于c-v2x与单车智能的融合优化自动驾驶功能的方法,其特征在于,采用了上述权利要求1~5任一所述的基于c-v2x与单车智能的融合优化自动驾驶功能的系统,所述方法包括:
技术总结本发明提供了一种基于C‑V2X与单车智能的融合优化自动驾驶功能的系统及方法,其中,所述方法包括:单车智能模块通过安装在车辆上的传感器获取车辆周围的环境信息;C‑V2X通信模块与其他车辆、行人及交通基础设施进行实时信息交互;融合决策与控制模块将单车智能模块提供的信息与C‑V2X通信模块提供的外部信息进行数据融合,并基于融合后的数据进行实时决策和控制,生成相应的驾驶策略和控制指令。技术研发人员:王爱春,龙成斌,方昱樑,贺荣受保护的技术使用者:江铃汽车股份有限公司技术研发日:技术公布日:2024/11/18本文地址:https://www.jishuxx.com/zhuanli/20241120/332629.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表