一种桁架机器人的制作方法
- 国知局
- 2024-11-25 15:16:16
本技术涉及纺织设备,特别是涉及一种桁架机器人。
背景技术:
1、经轴在纺织过程中起到关键作用,在染色的过程中,它是用来固定布匹或者拉链的设备,确保匹或者拉链能够按照一定的次序和间隔排列,将卷有布匹或者拉链的整个经轴,放入染缸进行染色,是最常见的染色方式。
2、现有技术中,单个经轴的重量可以达到两三百斤重,对于装卸经轴较为麻烦复杂,比如专利文献号为cn2552890y公开了一种经轴升降运输两用车,包括两底座,底座上安装有万象轮,在底座上安装有两立柱,两底座的立柱之间设有手推柄,两立柱上部安装有支撑架,支撑架之间连接有横梁,在两支撑架之间安装有转动轴,在一侧立柱中部安装有动力装置,动力装置的驱动轴上安装有驱动链轮,在转动轴的一端安装有与驱动链轮相配合的从动链轮,在转动轴上还安装有两个主动链轮,主动链轮与安装于支撑架上的从动链轮通过升降链条配合,升降链条一端挂接配重,另一端与沿立柱滑动的吊板连接,吊板上具有吊杆盘扣。
3、但是上述经轴升降运输装置仍旧需要人工操作,整体的操作时间久,效率低,而且需要人员负责将经轴放置到的运输装卸设备上,常规的经轴的重量在几十公斤到上百公斤之间,工作量大,如果发生倾倒容易造成事故。
技术实现思路
1、为解决背景技术中存在的至少一个方面的技术问题,本实用新型提出一种桁架机器人及方法,可以直接抓取染色后的经轴,到传送到带上,一台桁架机器可以多线配合多个经轴生产线,减少人工参与,节省设备成本,减少占用空间。
2、一种桁架机器人,包括:
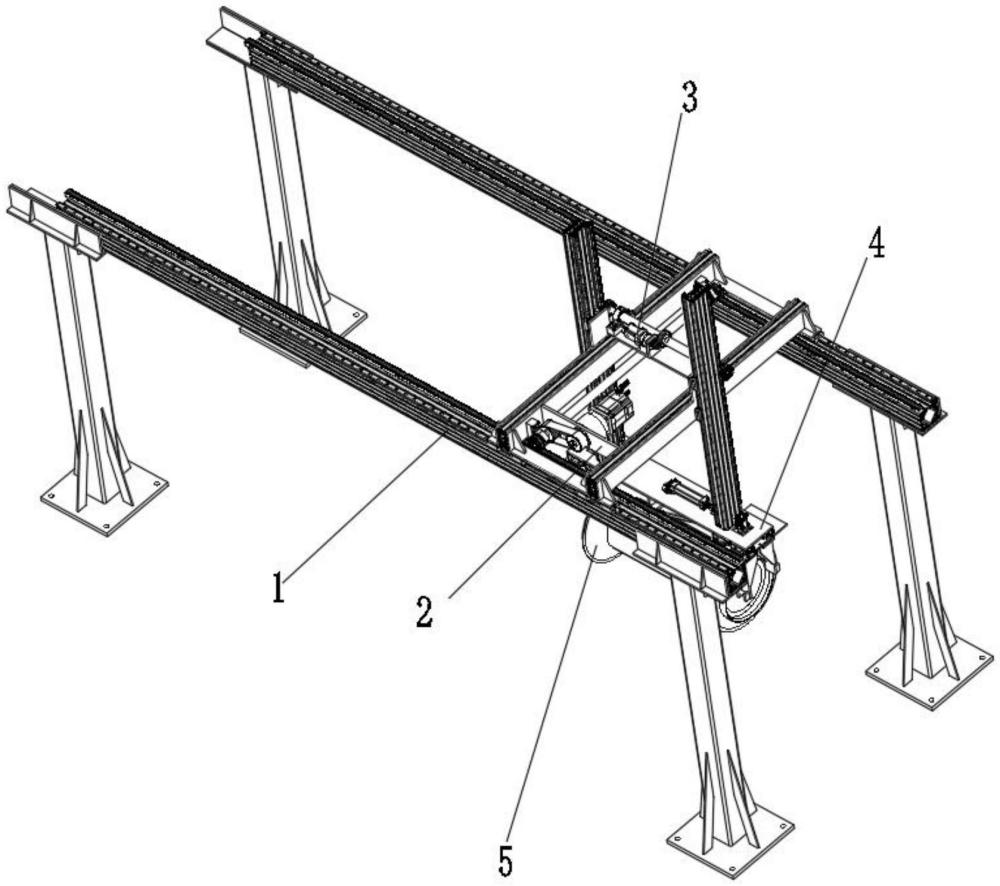
3、桁架,所述桁架包括支撑柱和设置在支撑柱上的横梁,横梁上设置有横向行轨和横向齿轨;
4、横向行走装置,所述横向行走装置沿所述横梁做往复运动,所述横向行走装置包括横向支架和横向驱动装置,所述横向支架与横向行轨滑动配合,所述横向驱动装置和横向齿轨齿轮啮合;
5、升降装置,所述升降装置设置在横向支架上,所述升降装置包括升降基座、升降驱动装置和升降杆,所述升降驱动装置控制所述升降杆在垂直方向上下移动;
6、经轴夹持装置,所述经轴夹持装置固定在升降杆的底部,所述经轴夹持装置用于夹紧或松开经轴。
7、作为优选,所述横梁数目为两根,且平行布置,各所述横梁上设置有横向行轨和横向齿轨;
8、所述横向驱动装置包括横向驱动座以及设置在横向驱动座上的横向驱动电机,所述横向驱动座固定在横向支架上,所述驱动电机的输出轴上设有主动轮,所述横向支架上还设有横向从动轴,所述主动轮和横向从动轴传动配合,所述横向从动轴的两端均连接有横向驱动齿轮,各横向驱动齿轮和对应的横向齿轨啮合配合。
9、作为优选,所述横向从动轴上设有横向从动轮,所述主动轮和横向从动轮之间通过同步带传动。
10、作为优选,所述横向支架包括两个横向杆,各所述横向杆的端部设有横向滑块,所述横向滑块滑动扣合在横向行轨上。
11、作为优选,所述升降基座的两端分别固定在两个横向杆上,所述升降驱动装置包括升降电机和升降传动轴,所述升降电机和升降传动轴齿轮传动配合,升降基座上设有用于固定升降传动轴的连接座。
12、作为优选,所述升降传动轴的两端均设有升降传动齿,两个升降杆的侧壁上均设有与升降传动齿配合的升降齿条,各所述横向杆上还设有升降滑板,各升降滑板和对应的升降杆滑动配合。
13、作为优选,所述经轴夹持装置包括夹持基座、伸缩电缸和联动装置,所述夹持基座的底面设有夹持导轨。
14、作为优选,所述联动装置包括联动板和两个联动杆,所述联动板和夹持基座之间设有旋转杆,所述联动板与旋转杆转动配合;
15、各所述联动杆的一端和联动板固定连接,各所述联动杆的另一端连接有夹持件,伸缩电缸的伸缩杆端部和其中一个夹持件之间设有连接件,伸缩电缸的伸缩杆往复运动,直接带动其中一个夹持件在所述夹持导轨上往复滑动配合,再通过两个联动杆同步带动另一个夹持件反向运动。
16、作为优选,各所述夹持件包括夹持板和两个对称设置的l型夹持扣,各所述l型夹持扣上设有夹持钉和限位挡板。
17、作为优选,各所述夹持件上还设有调节机构,所述调节机构包括调节电机和调节滑轨,各l型夹持扣在调节滑轨滑动配合,通过调节电机正反转动调节两个l型夹持扣之间的距离。
18、本实用新型带来的有益效果是:
19、1.通过横向行走装置本桁架机器人在其桁架的横向范围内可以通过配合多条染料生产线,通过全自动化提取经轴,减少人工操作,提高生产效率;
20、2.通过设置升降装置配合横向行走装置,可以将经轴抬升以及放下,完成经轴的上料或者卸料;
21、3.通过设置经轴夹持装置,夹持件来卡住经轴,实现夹紧固定和松开;
22、4.通过设置调节机构,可以调节夹持件中两个夹持钉之间的距离,可以配合各种不同管径的经轴,实现多条生产线的染色需求。
技术特征:1.一种桁架机器人,其特征在于,包括:
2.根据权利要求1所述的一种桁架机器人,其特征在于,所述横梁(12)数目为两根,且平行布置,所述横向驱动装置(22)包括横向驱动座(221)以及设置在横向驱动座(221)上的横向驱动电机(222),所述横向驱动座(221)固定在横向支架(21)上,所述驱动电机(222)的输出轴上设有主动轮(223),所述横向支架(21)上还设有横向从动轴(224),所述主动轮(223)和横向从动轴(224)传动配合,所述横向从动轴(224)的两端均连接有横向驱动齿轮(225),各横向驱动齿轮(225)和对应的横向齿轨(14)啮合配合。
3.根据权利要求2所述的一种桁架机器人,其特征在于,所述横向从动轴(224)上设有横向从动轮(226),所述主动轮(223)和横向从动轮(226)之间通过同步带(227)传动。
4.根据权利要求2所述的一种桁架机器人,其特征在于,所述横向支架(21)包括两个横向杆(211),各所述横向杆(211)的端部设有横向滑块(212),所述横向滑块(212)滑动扣合在横向行轨(13)上。
5.根据权利要求4所述的一种桁架机器人,其特征在于,所述升降基座(31)的两端分别固定在两个横向杆(211)上,所述升降驱动装置(32)包括升降电机(321)和升降传动轴(322),所述升降电机(321)和升降传动轴(322)齿轮传动配合,升降基座(31)上设有用于固定升降传动轴(322)的连接座(311)。
6.根据权利要求5所述的一种桁架机器人,其特征在于,所述升降传动轴(322)的两端均设有升降传动齿(323),两个升降杆(33)的侧壁上均设有与升降传动齿(323)配合的升降齿条(331),各所述横向杆(211)上还设有升降滑板(213),各升降滑板(213)和对应的升降杆(33)滑动配合。
7.根据权利要求1所述的一种桁架机器人,其特征在于,所述经轴夹持装置(4)包括夹持基座(41)、伸缩电缸(42)和联动装置(43),所述夹持基座(41)的底面设有夹持导轨(44)。
8.根据权利要求7所述的一种桁架机器人,其特征在于,所述联动装置(43)包括联动板(431)和两个联动杆(432),所述联动板(431)和夹持基座(41)之间设有旋转杆(433),所述联动板(431)与旋转杆(433)转动配合;
9.根据权利要求8所述的一种桁架机器人,其特征在于,各所述夹持件(45)包括夹持板(451)和两个对称设置的l型夹持扣(452),各所述l型夹持扣(452)上设有夹持钉(453)和限位挡板(454)。
10.根据权利要求9所述的一种桁架机器人,其特征在于,各所述夹持件(45)上还设有调节机构(46),所述调节机构(46)包括调节电机和调节滑轨(461),各l型夹持扣(452)在调节滑轨(461)滑动配合,通过调节电机正反转动调节两个l型夹持扣(452)之间的距离。
技术总结本技术涉及一种桁架机器人,包括桁架、横向行走装置、升降装置和经轴夹持装置,横向行走装置沿所述横梁做往复运动,横向行走装置包括横向支架和横向驱动装置,升降装置设置在横向支架上,升降驱动装置控制所述升降杆在垂直方向上下移动,通过横向行走装置本桁架机器人在其桁架的横向范围内可以通过配合多条染料生产线,通过全自动化提取经轴,减少人工操作,提高生产效率,升降装置配合横向行走装置,可以将经轴抬升以及放下,完成经轴的上料或者卸料,经轴夹持装置,夹持件来卡住经轴,实现夹紧固定和松开,调节机构可以调节夹持件中两个夹持钉之间的距离,可以配合各种不同管径的经轴,实现多条生产线的染色需求。技术研发人员:张家春受保护的技术使用者:杭州丹氏机器人科技有限公司技术研发日:20240304技术公布日:2024/11/21本文地址:https://www.jishuxx.com/zhuanli/20241125/337017.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表