一种臂架升降系统缓冲减速式防坠落装置的制作方法
- 国知局
- 2024-11-25 15:31:44
本技术涉及臂架升降系统,尤其涉及一种臂架升降系统缓冲减速式防坠落装置。
背景技术:
1、目前,臂架提升系统中的上连杆通过固定点a连接至转台,通过固定点d连接至中枢;下连杆通过固定点b连接至转台,通过固定点c连接至中枢,并且上连杆与下连杆所关联的四个固定点a、b、c、d共同组成了一个平行四边形的连杆变幅机构;臂架通过固定点g连接至中枢,变幅油缸通过固定点f连接至臂架,并且变幅油缸通过固定点e连接至中枢,臂架与变幅油缸的三个固定点e、f、g共同组成了一个三角形的连杆变幅机构;上述平行四边形的连杆变幅机构和三角形的连杆变幅机构通过枢纽连杆的固定点i和固定点h分别进行连接,从而形成了一套闭环的臂架提升系统。
2、当臂架提升系统收到臂架变幅动作指令带来的臂架角度变化时,变幅油缸按照动作指令进行延伸或者缩回,进而使三角形的连杆变幅机构带动平行四边形的连杆变幅机构,从而使臂架系统上升或者下降。当此过程中,枢纽连杆会出现焊缝开裂、固定销轴失效、固定销轴脱落等各式失效的情况。
3、当上述失效情况发生时,三角形的连杆变幅机构由于油缸阀块的自锁性能够一直维持其原有的形态,但是平行四边形的连杆变幅机构则会由于枢纽连杆的失效进而失去连接支撑,即成为一个自由无约束的机构,从而引起臂架系统发生坠落,进而造成操作人员坠落,存在安全隐患,严重时还会造成人员伤亡。
技术实现思路
1、本实用新型的目的在于,克服现有技术中存在的由于枢纽连杆失效进而发生坠落的不足之处,提供一种臂架升降系统缓冲减速式防坠落装置,其设计合理,结构巧妙,具备监测、减速的功能,防坠落效果较好,能够对施工人员进行二次保护,安全性高,适于推广。
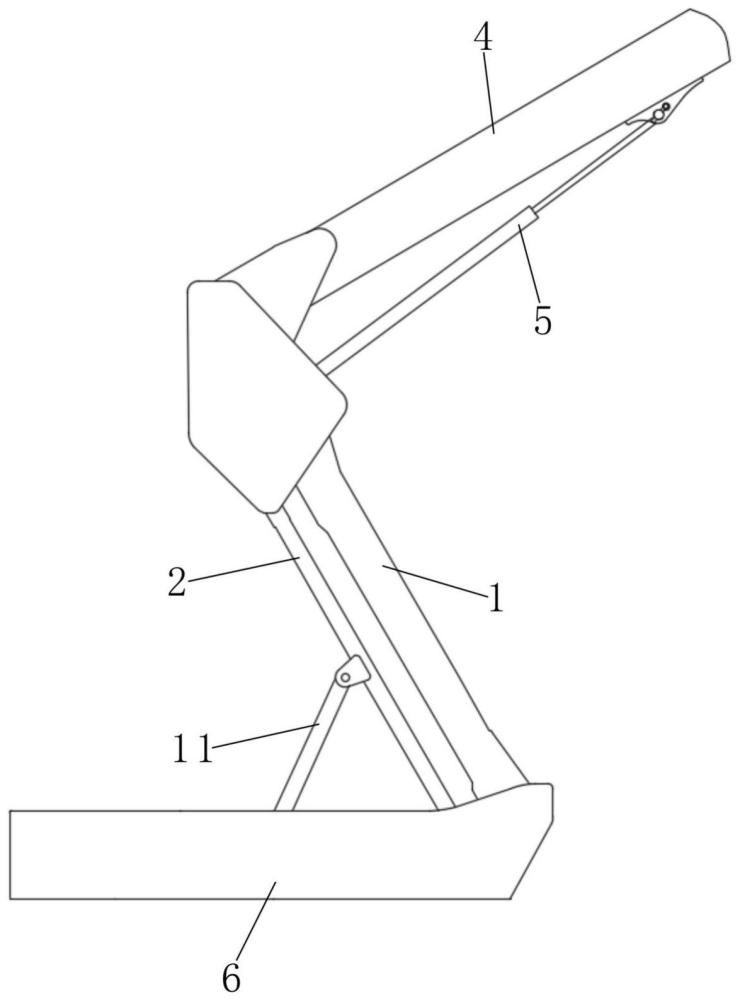
2、本实用新型是通过下述技术方案来实现的:一种臂架升降系统缓冲减速式防坠落装置,包括臂架升降系统的上连杆、下连杆和转台,转台的两侧分别设置有轨道,轨道上设置有滑块;滑块通过辅助连杆与下连杆相连接,辅助连杆的顶端与下连杆铰接,辅助连杆的底端与滑块铰接;转台上设置有缓冲减速机构,缓冲减速机构能够对滑块进行缓冲减速;上连杆与转台的连接处设置有用于监测上连杆转速的转速监测单元,转速监测单元与缓冲减速机构信号连接;当缓冲减速机构接收到转速监测单元发出的信号时,缓冲减速机构动作并对滑块进行缓冲减速。
3、本实用新型的进一步改进还有,缓冲减速机构包括固定部,固定部设置于两个轨道之间的转台上,固定部上均匀间隔设置有若干缓冲减速模块组,当缓冲减速机构接收到转速监测单元发出的信号时,缓冲减速模块组触发并与滑块相接触,从而对滑块进行缓冲减速。
4、本实用新型的进一步改进还有,缓冲减速模块组包括对称设置于固定部两侧的缓冲减速块,缓冲减速块通过连接轴与转台转动连接,缓冲减速块朝向固定部的一侧通过弹簧与固定部相连接;弹簧内部设置有熔断件,熔断件能够使弹簧处于压缩状态,即是使缓冲减速块处于收缩状态;当缓冲减速机构接收到转速监测单元发出的信号时能够使熔断件熔断,从而使弹簧弹开,即是使缓冲减速块弹开,此时缓冲减速块朝向滑块的一侧能够对滑块进行缓冲减速。
5、本实用新型的进一步改进还有,固定部设置于两个轨道之间的中线处。
6、本实用新型的进一步改进还有,滑块朝向缓冲减速块的一端设置有倒角,缓冲减速块朝向滑块的一侧设置有斜面。
7、本实用新型的进一步改进还有,缓冲减速块为直角三角形结构,缓冲减速块的直角端与弹簧相连接,缓冲减速块的一个锐角端通过连接轴与转台转动连接,缓冲减速块的另一个锐角端能够与滑块相接触。
8、本实用新型的进一步改进还有,轨道朝向缓冲减速机构的一侧开设有与缓冲减速块相对应的限位口,缓冲减速块朝向轨道的一侧开设有弧形口;缓冲减速块通过限位口能够与滑块相接触,并且弧形口能够与限位口进行贴合限位,从而防止缓冲减速块回弹。
9、本实用新型的进一步改进还有,缓冲减速模块设置有五组。
10、本实用新型的进一步改进还有,转速监测单元包括监测件和速度传感器,监测件通过固定件安装于上连杆的同轴体上,速度传感器通过安装架安装于转台上,速度传感器与监测件相配合能够监测上连杆的转速。
11、本实用新型的进一步改进还有,监测件为半圆的结构,监测件的弧面为齿面结构,并且该齿面朝向速度传感器。
12、从以上技术方案可以看出,本实用新型的有益效果:当枢纽连杆发生失效时,上连杆、下连杆会绕固定点逆时针转动,臂架与变幅油缸组成的三角形维持状态不变,辅助连杆会随着下连杆顺时针旋转,当上连杆的角速度变化超过速度传感器的安全设定临界值时,弹簧内部的熔断件熔断,从而使弹簧由压缩状态瞬时进行弹开,并推动所连接的缓冲减速块绕连接轴旋转,即是弹开缓冲减速块,此时缓冲减速块能够与滑块相接触,从而使缓冲减速机构形成了一个可供辅助连杆推动滑块移动过程中的缓冲减速的结构。在此期间缓冲减速块与移动的滑块进行接触后,其滑块运动的加速度所产生的推力推动缓冲减速块进一步的促进弹簧进行压缩,直至滑块停止移动。由此可见,本装置的设计合理,结构巧妙,具备监测、减速的功能,防坠落效果较好,能够对施工人员进行二次保护,安全性高,适于推广。
技术特征:1.一种臂架升降系统缓冲减速式防坠落装置,包括臂架升降系统的上连杆(1)、下连杆(2)和转台(6),其特征在于,转台(6)的两侧分别设置有轨道(13),轨道(13)上设置有滑块(12);滑块(12)通过辅助连杆(11)与下连杆(2)相连接,辅助连杆(11)的顶端与下连杆(2)铰接,辅助连杆(11)的底端与滑块(12)铰接;转台(6)上设置有缓冲减速机构,缓冲减速机构能够对滑块(12)进行缓冲减速;上连杆(1)与转台(6)的连接处设置有用于监测上连杆(1)转速的转速监测单元,转速监测单元与缓冲减速机构信号连接;当缓冲减速机构接收到转速监测单元发出的信号时,缓冲减速机构动作并对滑块(12)进行缓冲减速。
2.根据权利要求1所述的一种臂架升降系统缓冲减速式防坠落装置,其特征在于,缓冲减速机构包括固定部(17),固定部(17)设置于两个轨道(13)之间的转台(6)上,固定部(17)上均匀间隔设置有若干缓冲减速模块组,当缓冲减速机构接收到转速监测单元发出的信号时,缓冲减速模块组触发并与滑块(12)相接触,从而对滑块(12)进行缓冲减速。
3.根据权利要求2所述的一种臂架升降系统缓冲减速式防坠落装置,其特征在于,缓冲减速模块组包括对称设置于固定部(17)两侧的缓冲减速块(14),缓冲减速块(14)通过连接轴(15)与转台(6)转动连接,缓冲减速块(14)朝向固定部(17)的一侧通过弹簧(16)与固定部(17)相连接;弹簧(16)内部设置有熔断件(18),熔断件(18)能够使弹簧(16)处于压缩状态,即是使缓冲减速块(14)处于收缩状态;当缓冲减速机构接收到转速监测单元发出的信号时能够使熔断件(18)熔断,从而使弹簧(16)弹开,即是使缓冲减速块(14)弹开,此时缓冲减速块(14)朝向滑块(12)的一侧能够对滑块(12)进行缓冲减速。
4.根据权利要求3所述的一种臂架升降系统缓冲减速式防坠落装置,其特征在于,固定部(17)设置于两个轨道(13)之间的中线处。
5.根据权利要求4所述的一种臂架升降系统缓冲减速式防坠落装置,其特征在于,滑块(12)朝向缓冲减速块(14)的一端设置有倒角,缓冲减速块(14)朝向滑块(12)的一侧设置有斜面。
6.根据权利要求5所述的一种臂架升降系统缓冲减速式防坠落装置,其特征在于,缓冲减速块(14)为直角三角形结构,缓冲减速块(14)的直角端与弹簧(16)相连接,缓冲减速块(14)的一个锐角端通过连接轴(15)与转台(6)转动连接,缓冲减速块(14)的另一个锐角端能够与滑块(12)相接触。
7.根据权利要求6所述的一种臂架升降系统缓冲减速式防坠落装置,其特征在于,轨道(13)朝向缓冲减速机构的一侧开设有与缓冲减速块(14)相对应的限位口(1301),缓冲减速块(14)朝向轨道(13)的一侧开设有弧形口(1401);缓冲减速块(14)通过限位口(1301)能够与滑块(12)相接触,并且弧形口(1401)能够与限位口(1301)进行贴合限位,从而防止缓冲减速块(14)回弹。
8.根据权利要求7所述的一种臂架升降系统缓冲减速式防坠落装置,其特征在于,缓冲减速模块设置有五组。
9.根据权利要求1所述的一种臂架升降系统缓冲减速式防坠落装置,其特征在于,转速监测单元包括监测件(8)和速度传感器(10),监测件(8)通过固定件(7)安装于上连杆(1)的同轴体上,速度传感器(10)通过安装架(9)安装于转台(6)上,速度传感器(10)与监测件(8)相配合能够监测上连杆(1)的转速。
10.根据权利要求9所述的一种臂架升降系统缓冲减速式防坠落装置,其特征在于,监测件(8)为半圆的结构,监测件(8)的弧面为齿面结构,并且该齿面朝向速度传感器(10)。
技术总结一种臂架升降系统缓冲减速式防坠落装置,属于臂架升降系统技术领域,包括臂架升降系统的上连杆、下连杆和转台,转台的两侧分别设置有轨道,轨道上设置有滑块;滑块通过辅助连杆与下连杆相连接,辅助连杆的顶端与下连杆铰接,辅助连杆的底端与滑块铰接;转台上设置有缓冲减速机构,缓冲减速机构能够对滑块进行缓冲减速;上连杆与转台的连接处设置有用于监测上连杆转速的转速监测单元,转速监测单元与缓冲减速机构信号连接。本技术所述的一种臂架升降系统缓冲减速式防坠落装置,其设计合理,结构巧妙,具备监测、减速的功能,防坠落效果较好,能够对施工人员进行二次保护,安全性高,适于推广。技术研发人员:王传勤,张腾,英豪受保护的技术使用者:临工重机股份有限公司技术研发日:20240416技术公布日:2024/11/21本文地址:https://www.jishuxx.com/zhuanli/20241125/338071.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表