一种自主式光伏太阳能板清洁机器人
- 国知局
- 2024-11-25 15:41:53
本技术属于清洁机构,具体涉及一种自主式光伏太阳能板清洁机器人。
背景技术:
1、光伏发电是利用半导体界面的光生伏特效应,从而将太阳能转换为电能。中国的太阳能资源十分丰富,开发潜力巨大。目前我国大规模的光伏电站主要布设在西北等日照量充足的地区,为了保证光伏太阳能板的发电效率,如何有效清洁光伏太阳能板是亟待解决的问题。
2、对于太阳能光伏板而言,关键是如何提高光电转换效率。而影响光伏转换效率的因素有很多,如光伏板的材料、布置朝向、倾角以及光伏太阳能板上的污染物。光伏面板表面大多为玻璃材质,在光伏面板使用过程中,空气中的灰尘颗粒会逐渐堆积在太阳能电池板表面玻璃上,造成太阳能电池板表面玻璃的透光率下降。李建军等人在《太阳能光伏发电系统的研究进展》一文中指出,透光率的下降会导致光伏组件的光伏转换效率降低30%-40%。树叶和鸟粪等物质会遮盖光伏板表面,从而导致光伏太阳能板局部温度过高,降低光伏板的使用寿命。所以,清洁光伏太阳能板表面可以提高光电转换效率,具有重要经济意义。
3、目前主要的清洁技术有纳米自清洁薄膜、电除尘以及机械除尘。其中,纳米自清洁薄膜成本较高,未获得广泛利用;电除尘技术在雨水天气下静电力会失效,从而除尘技术也消失;机械除尘为目前最广泛的清洁方式。中国最大的光伏发电基地位于青海省海南藏族自治州共和县塔拉滩,面积约为609平方公里。该地区海拔将近3000米,降雨稀少,雨水并不能有效清洁光伏太阳能板,而人工清洁需要投入大量人力、物力及时间,但在这种偏远地区很难组织大量人力来清洁,且效率不能够保证。市面上的清洁机器人种类繁多,多用于家政清洁以及垂直安装的太阳墙系统清洁,并没有专用于清洁光伏电站等地的清洁机器人。国内外也已经研究出多种应用于光伏组件清洗的机器人,但普及性都不高。2010年,anderson等首次提出一款用于光伏面板的便携式机器人清洁设备,该设备由电动驱动小车,皮带驱动结构和清洁头组成,清洁头由皮带驱动上下运动,电动驱动小车使机器人沿着光伏阵列的顶部和底部边缘运行,相邻车辆为机器人提供电力和水资源供给。2014年,以色列公司推出了一种自主光伏面板清洁机器人ecoppia e4,但该机器人清扫效率低下,清洁刷头上下移动时会造成二次扬尘;2014年,青岛昱臣机器人公司率先研发出国内首款车载机械臂式光伏清洁机器人,但该设备对操作人员的操作要求较高,且需要光伏阵列之间具有较大空隙便于机器人通过。
技术实现思路
1、本实用新型的目的在于提出一种自主式光伏太阳能板清洁机器人,解决现有技术才存在的普及性差、价格昂贵以及造成二次扬尘的问题。
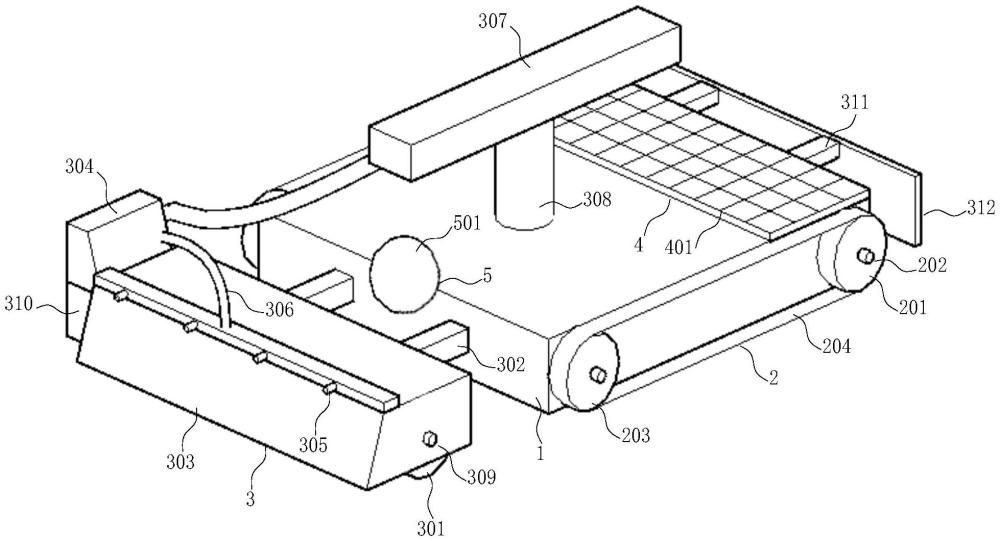
2、为实现上述目的,本实用新型的一种自主式光伏太阳能板清洁机器人包括:
3、支撑平台;
4、设置在支撑平台上的行走机构,通过所述行走机构带动支撑平台运动;
5、设置在所述支撑平台上的清洁组件,所述清洁组件包括设置在支撑平台行进方向前端的喷水结构和清洁结构以及设置在支撑平台行进方向后端的刮水结构,所述清洁结构至少包括垂直行进方向设置的清洁滚刷;
6、控制器,通过所述控制器控制行走机构以及清洁组件运动,所述控制器通过无线通讯模块和用户端连接;
7、以及供电组件,所述供电组件和所述行走机构、清洁组件及控制器连接供电。
8、所述清洁机器人还包括识别组件,所述识别组件包括:
9、摄像头,所述摄像头设置在所述支撑平台上,采集清洁机器人作用部位的光伏太阳能板表面图像;
10、和边界传感器,所述边界传感器设置在清洁机器人的四周;
11、设置在支撑平台上并和控制器电连接的雷达;
12、以及光敏电阻,所述光敏电阻设置在支撑平台上,通过所述光敏电阻采集太阳光照强度;
13、所述供电组件分别和摄像头、边界传感器以及光敏电阻连接供电,所述摄像头、边界传感器以及光敏电阻连接供电分别和控制器电连接,并通过无线传输模块将采集的信息传递至用户端。
14、所述行走机构包括对称设置在支撑平台两侧的两组,每组包括:
15、主动轮;
16、输出端和主动轮的传动轴同轴固定连接的第一电机;
17、对称设置在支撑平台两侧的两个从动轮;
18、以及履带,位于支撑平台同侧的主动轮和从动轮通过履带连接。
19、清洁组件还包括通过第一固定件固定连接在支撑平台行进方向前端的下端开口的保护壳。
20、所述喷水结构包括:
21、设置在保护壳或支撑平台上的清洁水罐;
22、以及设置在保护壳上的多个串联的高压喷头,多个所述高压喷头对清洁机器人沿行进方向前端进行喷水,高压喷头通过软水管和清洁水罐连通。
23、所述喷水结构还包括设置在支撑平台上的水管放置器,所述水管放置器通过支撑件和所述支撑平台转动连接;所述支撑件包括一端和支撑平台固定连接的第一管件以及套在第一管件上和第一管件转动配合的第二管件,所述第二管件上端和所述水管放置器固定连接。
24、所述清洁结构还包括:
25、和所述清洁滚刷同轴固定连接的转轴,所述转轴两端和所述清洁组件的保护壳转动配合;
26、以及设置在所述保护壳上的第二电机,所述第二电机的输出端和所述转轴同轴固定连接。
27、所述刮水结构包括通过第二固定件设置在所述支撑平台行进方向末端的橡胶刮水器。
28、所述供电组件包括:
29、设置在所述支撑平台内的电池;
30、以及设置在所述支撑平台上表面的太阳能充电板,所述太阳能充电板和所述电池电连接。
31、本实用新型的有益效果为:本实用新型一种自主式光伏太阳能板清洁机器人,通过控制器与各个结构之间的相互配合,可以实现自主式的光伏太阳能板清洁工作,在光敏电阻感知到太阳光照强度低于某一值时,用户端控制或自主式开始清洁工作,通过第一电机组及第二电机驱动,行走机构和清洁机构开始运动,高压喷头持续放水,与此同时,第二电机驱动清洁滚刷开始旋转,清洁滚刷的转轴方向与清洁机器人前进方向相垂直,在光伏太阳能表面的作用力方向与清洁机器人行进方向相反,因此在本发明行走时,清洁滚刷能随着机器人行走对光伏面板表面进行清洁,同时,旋转滚刷设计能够对光伏面板表面的鸟粪等粘性物质进行有效处理,支撑平台后端的清洁刮水器能对机器人行走清扫留下的痕迹进行处理,可以有效清除清洁过程中留下的水渍和痕迹,同时可以避免对光伏面板表面造成破坏,导致光电转换效率下降。本发明的最大清洁长度为滚刷的长度,因此本发明具有较强的适应性。该清洁机器人采用履带式行走机构,性能更加均衡。边界传感器、太阳能充电板、光敏电阻的使用大幅度提高了该清洁机器人的自动化程度,有效减少了人力在清洁过程中的投入。喷水结构的设置可以使使用者自由切换有水清洁模式和无水清洁模式,有水清洁模式时,使用者可以通过外接水管将清洁水罐进水口与供水设备连接。
32、本实用新型针对目前机器人大多存在清洁效率低、对人工要求高等缺点,本发明致力于提供一种自主式光伏太阳能板ai清洁机器人,工作人员可以远程监控并控制多台机器人在多个光伏太阳能板上工作,来自地面蓄水池中的水通过软水管吸入到机器人上的清洁水罐中,与清洁水罐中的水基溶液按照1:20的比例混合,在此浓度下并不会对环境造成污染,并通过高压喷头喷洒到太阳能板上以达到最佳的清洗效果,无需在现场,以提高机器人的工作效率。同时,ai技术的进步使得机器人成本有所下降。与人工清洁相比,它可以去到危险、偏远地区,无需考虑施工人员的安全性;此外,使用ai技术的机器人效率高、清洁质量好,无需人工检查;人工清洁时,需要耗费大量物力、财力及时间,使用清洁机器人就可以很好地避免这些问题。
本文地址:https://www.jishuxx.com/zhuanli/20241125/338587.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表