基于复合函数非线性反馈的大型船舶航向保持控制方法
- 国知局
- 2024-12-06 12:13:48
本发明涉及船舶控制,尤其涉及一种基于复合函数非线性反馈的大型船舶航向保持控制方法。
背景技术:
1、随着全球贸易的不断扩大,大型船舶凭借着独特的运力优势,已经成为现如今主要的物流运输方式,因此,它的安全同样也是不可忽视的。然而现如今许多大型船舶的事故依旧在不断地发生,造成的损失也在不断增加。现如今,大多数对于船舶控制的研究都基于小型船的模型。面对大型船舶与小型船舶的差异该如何将对小型船舶控制的相关研究运用于大型船舶中是我们需要思考的问题,大型船舶不仅自身控制较难,在面对复杂恶劣的海况时,其发生意外危险的可能性也会大幅增加,这给船舶驾驶员带来不小航行上的担忧和挑战。除此之外,随着全球变暖的日益加剧,节能降碳刻不容缓,在现有的航向保持控制算法中,针对大型船舶如何同时提高风浪干扰下强鲁棒性并且节约控制能耗还存在不足。
技术实现思路
1、本发明公开了一种基于复合函数非线性反馈的大型船舶航向保持控制方法,以克服上述技术问题。
2、为了实现上述目的,本发明的技术方案是:
3、一种基于复合函数非线性反馈的大型船舶航向保持控制方法,包括如下步骤:
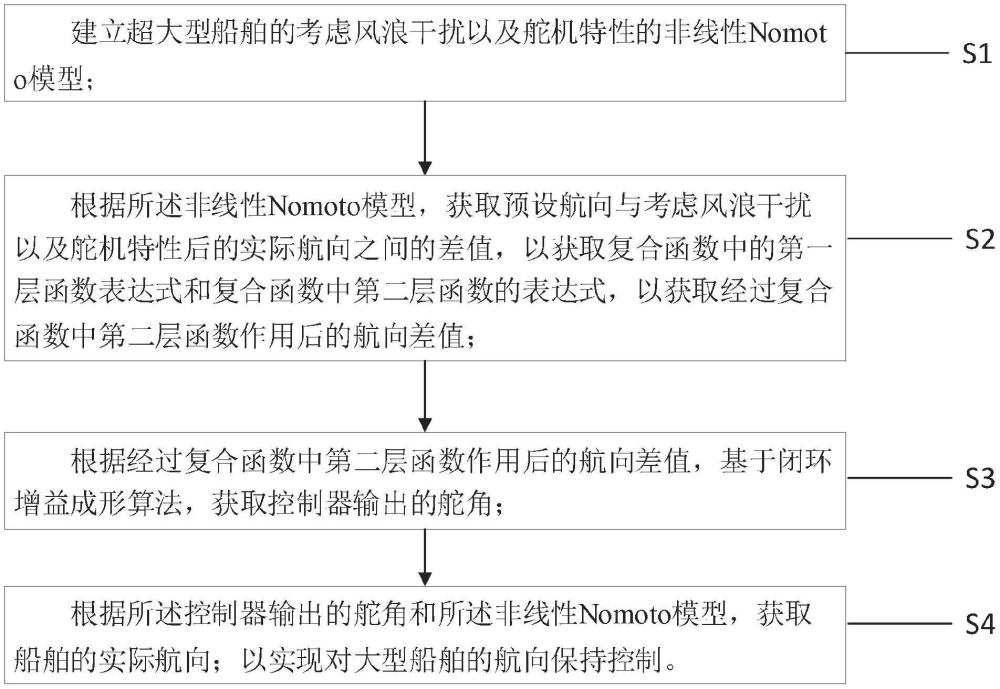
4、s1:建立超大型船舶的考虑风浪干扰以及舵机特性的非线性nomoto模型;
5、s2、根据所述非线性nomoto模型,获取预设航向与当前时刻的实际航向之间的差值,以获取复合函数中的第一层函数表达式和复合函数中第二层函数的表达式,进而获取经过复合函数中第二层函数作用后的航向差值;
6、s3:根据经过复合函数中第二层函数作用后的航向差值,基于闭环增益成形算法,获取控制器输出的舵角;
7、s4:根据所述控制器输出的舵角和所述非线性nomoto模型,获取船舶下一时刻的实际航向;以实现对大型船舶的航向保持控制。
8、进一步的,经过复合函数中第二层函数作用后的航向差值获取如下:
9、
10、式中:e表示预设航向与考虑风浪干扰以及舵机特性后的实际航向之间的差值;e'表示经过复合函数中的第一层函数作用后的航向差值;f1()表示复合函数中的第一层函数,由tanh函数和tan函数组合构成;α表示f1()中的tanh函数的增益系数,β表示tanh函数中e的增益系数,χ表示表示tan函数中的增益系数,γ表示tan函数中误差的增益系数;表示e'经过复合函数中第二层函数作用后的航向差值;f2()表示复合函数中第二层函数,由tanh函数、ln函数以及以自然对数为底的指数函数组成;a表示f2()中的tanh函数的增益系数,b表示ln函数的外部增益系数,c表示ln函数的内部增益系数,d表示指数函的增益系数,λ表示指数函数中e的增益系数;ψs表示预设的航向;是考虑风浪干扰以及舵机特性后的实际航向;表示经过复合函数中第二层函数作用后的航向差值。
11、进一步的,所述非线性nomoto模型建立如下:
12、
13、式中:ψ表示考虑风干扰不考虑浪干扰的航向,是航向变化率,即转艏角速度;为角加速度;k0表示船舶旋回性指数;t0表示船舶追随性指数;αs,βs均表示非线性参数;δ是舵角;|·|表示绝对值运算;为控制器输出的舵角;是控制器输出的舵速;δwind是风干扰产生的舵角;ψwave表示浪对航向的干扰值;ξ是白噪声;s是拉普拉斯算子;是考虑风浪干扰以及舵机特性后的实际航向。
14、进一步的,所述闭环增益成形算法所采用的公式如下:
15、
16、其中,kc为pid控制器;k0表示船舶旋回性指数;t0表示船舶追随性指数;s表示拉普拉斯算子;表示e'经过复合函数中第二层函数作用后的航向差值;为控制器输出的舵角。
17、进一步的,还包括s5:获取通过taylor级数展开的复合函数中的第一层函数表达式和复合函数中第二层函数的表达式,以评估复合函数对航向保持控制系统的稳定性、航向保持控制系统的动态性能以及对航向保持控制系统的控制输出的影响;
18、taylor级数展开所述复合函数中的第一层函数表达式和复合函数中第二层函数的表达式如下:
19、
20、式中:f1()表示复合函数中的第一层函数,由tanh函数和tan函数组合构成;α表示f1()中tanh函数的增益系数,β表示tanh函数中e的增益系数,χ表示表示tan函数中的增益系数,γ表示tan函数中误差的增益系数;表示e'经过复合函数中第二层函数作用后的航向差值;f2()表示复合函数中第二层函数,由tanh函数、ln函数以及以自然对数为底的指数函数组成;a表示中f2()tanh函数的增益系数,b表示ln函数的外部增益系数,c表示ln函数的内部增益系数,d表示指数函的增益系数,λ表示指数函数中e的增益系数。
21、有益效果:本发明的一种基于复合函数非线性反馈的大型船舶航向保持控制方法,建立了超大型船舶的考虑风浪干扰以及舵机特性的非线性nomoto模型;获取预设航向与考虑风浪干扰以及舵机特性后的实际航向之间的差值,以获取复合函数中的第一层函数表达式和第二层函数的表达式,得到经过复合函数中第二层函数作用后的航向差值;基于闭环增益成形算法,获取控制器输出的舵角;进而能够获取船舶的实际航向,实现对大型船舶的航向保持控制。本发明能够在考虑超大型船舶的舵机特性以及风浪干扰的情况下,针对超大型船舶航向保持控制,通过获取复合函数中的第一层函数表达式和第二层函数的表达式,采用复合函数非线性反馈技术比简单函数非线性反馈技术鲁棒性更强,并且调节时间缩短、最大偏航角减小、平均偏航角减少,平均舵角减少、平均舵角变化率缩短,同时,减少航向保持过程中的能量消耗,综合性能指标更好,达到了强鲁棒低能耗的目的,这对以后大型船舶的航向保持控制具有重要的理论指导意义。
技术特征:1.一种基于复合函数非线性反馈的大型船舶航向保持控制方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种基于复合函数非线性反馈的大型船舶航向保持控制方法,其特征在于,经过复合函数中第二层函数作用后的航向差值获取如下:
3.根据权利要求1所述的一种基于复合函数非线性反馈的大型船舶航向保持控制方法,其特征在于,所述非线性nomoto模型建立如下:
4.根据权利要求1所述的一种基于复合函数非线性反馈的大型船舶航向保持控制方法,其特征在于,所述闭环增益成形算法所采用的公式如下:
5.根据权利要求1所述的一种基于复合函数非线性反馈的大型船舶航向保持控制方法,其特征在于,还包括s5:获取通过taylor级数展开的复合函数中的第一层函数表达式和复合函数中第二层函数的表达式,以评估复合函数对航向保持控制系统的稳定性、航向保持控制系统的动态性能以及对航向保持控制系统的控制输出的影响;
技术总结本发明公开了一种基于复合函数非线性反馈的大型船舶航向保持控制方法,通过预设航向与实际航向之间的差值,获取复合函数中的第一层函数表达式和第二层函数的表达式,得到经过复合函数中第二层函数作用后的航向差值;最终得到控制器输出的舵角以及实际航向,实现对大型船舶的航向保持控制。本发明能够在考虑超大型船舶的舵机特性以及风浪干扰的情况下,针对超大型船舶航向保持控制,采用复合函数非线性反馈技术比简单函数非线性反馈技术鲁棒性更强,并且调节时间缩短、最大偏航角减小、平均偏航角减少,平均舵角减少、平均舵角变化率缩短,同时,减少航向保持过程中的能量消耗,综合性能指标更好,达到了强鲁棒低能耗的目的。技术研发人员:张显库,范佳明,刘宁宁受保护的技术使用者:大连海事大学技术研发日:技术公布日:2024/12/2本文地址:https://www.jishuxx.com/zhuanli/20241204/340091.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表