大白菜包心捆扎机器人
- 国知局
- 2024-12-06 12:20:35
本发明涉及大白菜捆扎,尤其涉及一种大白菜包心捆扎机器人。
背景技术:
1、在大白菜的生长过程中,因为大白菜不受外力的限制,大白菜的菜叶会向四周生长延伸。那么相邻的大白菜之间,菜叶会相互延伸,进而导致部分菜叶被遮挡,被遮挡的菜叶无法照射到阳光,那么就会影响大白菜的生长。同时,在大白菜的生长过程中,天气逐渐变得寒冷,那么大白菜上散开的菜叶会增大与空气的接触面积,导致大白菜被冻伤,影响了大白菜的产量。
2、因此,在大白菜的生长过程中,需要将大白菜进行捆扎,保证大白菜的菜叶不会散开。通常这种操作是通过人工进行,因为大白菜高度较低,导致人工捆扎不方便。并且捆扎时需要先将菜叶进行收紧,在保持收紧转态下,再进行捆扎操作,这对人工操作也是一个巨大的考验。因此,目前人工捆扎大白菜的方式效率低下,且需要消耗大量的人力资源。
技术实现思路
0、技术实现要素:/发明内容
1、本发明提供一种大白菜包心捆扎机器人及使用方法,用以解决现有技术中人工捆扎大白菜效率低下的缺陷。
2、本发明提供一种大白菜包心捆扎机器人,用于捆扎生长周期内的大白菜,包括:
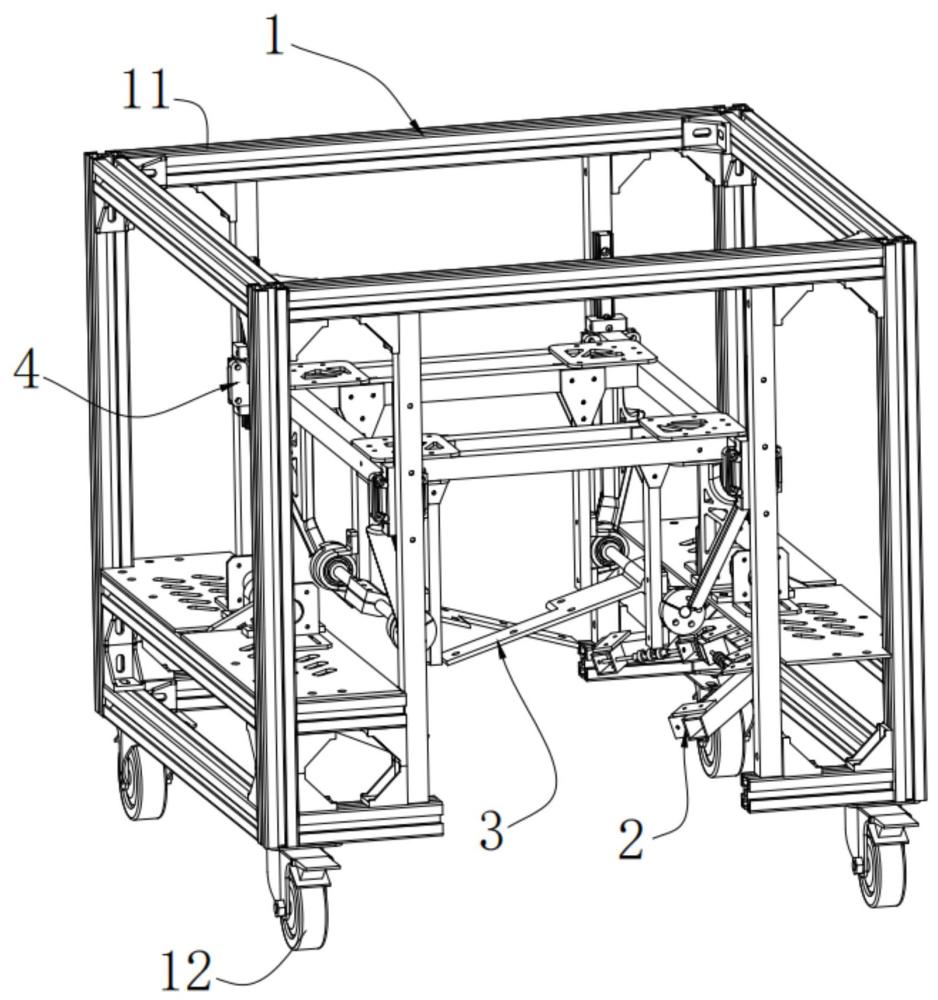
3、移动架,所述移动架设有安装支架以及连接于安装支架的移动部,所述移动部用于带动所述安装支架移动;
4、夹持机构,连接于所述安装支架,所述夹持机构设有夹持电机以及两个相对布置的机械夹,所述电机与两个所述机械夹传动连接,用于控制两个所述机械夹相向运动;
5、捆扎机构,连接于所述安装支架,所述捆扎机构设有多个滑轨、驱动机构以及多个弹性环,多个所述滑轨在所述安装支架上环形布置,用于撑开所述弹性环,多个所述弹性环在所述述滑轨上依次排布,所述驱动机构连接于所述滑轨并与所述弹性环传动连接,用于将所述所述弹性环从所述滑轨上拨离。
6、根据本发明提供的一种大白菜包心捆扎机器人,所述驱动机构包括固定架、拨板以及拨爪,所述固定架连接于所述安装支架,所述滑轨连接于所述固定架,所述拨板与所述固定架可相对转动地连接,相邻的两个所述滑轨之间布置有所述拨板,且所述拨板朝向所述滑轨的两端各连接有一个拨爪,所述拨板用于带动所述拨爪转动,从而将所述所述弹性环从所述滑轨上拨离。
7、根据本发明提供的一种大白菜包心捆扎机器人,所述驱动机构还包括连杆,所述连杆与所述固定架可相对转动地连接,所述拨板与所述连杆连接,用于带动所述连杆转动,所述连杆朝向所述滑轨的两端各连接有一个拨爪。
8、根据本发明提供的一种大白菜包心捆扎机器人,所述驱动机构包括两个所述拨板,沿竖直方向的投影,两个所述拨板的投影至少部分重叠。
9、根据本发明提供的一种大白菜包心捆扎机器人,所述拨爪设有拨动部,所述拨动部沿着所述拨爪的转动半径的径向延伸,且所述拨动部的延伸距离大于所述拨爪与所述弹性环的间距。
10、根据本发明提供的一种大白菜包心捆扎机器人,所述大白菜包心捆扎机器人还包括升降机构,所述升降机构与所述捆扎机构连接,用于带动所述捆扎机构朝向大白菜移动,从而通过大白菜抵顶所述拨板,带动所述拨板转动。
11、根据本发明提供的一种大白菜包心捆扎机器人,沿朝向大白菜的方向,多个所述滑轨朝向所述弹性环中心倾斜。
12、根据本发明提供的一种大白菜包心捆扎机器人,所述滑轨朝向大白菜的一端设有限位凸起,所述限位凸起沿着远离所述弹性环中心的方向延伸,用于防止所述弹性环从所述滑轨脱落。
13、根据本发明提供的一种大白菜包心捆扎机器人,所述机械夹朝向大白菜的一侧设有弹性件,所述机械夹通过所述弹性件与大白菜抵接。
14、根据本发明提供的一种大白菜包心捆扎机器人,所述机械夹朝向大白菜的一侧还设有压力传感器,所述压力传感器用于检测所述机械夹与大白菜抵接时的压力,当压力传感器检测到预设压力值信号时,所述电机控制所述机械夹停止运动。
15、本发明提供的一种大白菜包心捆扎机器人,通过移动部带动整个机构移动至大白菜的正上方,然后通过夹持电机驱动两个机械夹朝中心靠拢,从而将大白菜散开的菜叶夹紧,再由驱动机构将弹性环拨离至大白菜上,通过弹性环的收缩,将大白菜进行捆扎。整个捆扎过程无需人工操作,节省了人力资源,提高了工作效率。
技术特征:1.一种大白菜包心捆扎机器人,用于捆扎生长周期内的大白菜,其特征在于,包括:
2.根据权利要求1所述的大白菜包心捆扎机器人,其特征在于,所述驱动机构(32)包括固定架(321)、拨板(322)以及拨爪(323),所述固定架(321)连接于所述安装支架(11),所述滑轨(31)连接于所述固定架(321),所述拨板(322)与所述固定架(321)可相对转动地连接,相邻的两个所述滑轨(31)之间布置有所述拨板(322),且所述拨板(322)朝向所述滑轨(31)的两端各连接有一个拨爪(323),所述拨板(322)用于带动所述拨爪(323)转动,从而将所述所述弹性环(33)从所述滑轨(31)上拨离。
3.根据权利要求2所述的大白菜包心捆扎机器人,其特征在于,所述驱动机构(32)还包括连杆(324),所述连杆(324)与所述固定架(321)可相对转动地连接,所述拨板(322)与所述连杆(324)连接,用于带动所述连杆(324)转动,所述连杆(324)朝向所述滑轨(31)的两端各连接有一个拨爪(323)。
4.根据权利要求2所述的大白菜包心捆扎机器人,其特征在于,所述驱动机构(32)包括两个所述拨板(322),沿竖直方向的投影,两个所述拨板(322)的投影至少部分重叠。
5.根据权利要求2所述的大白菜包心捆扎机器人,其特征在于,所述拨爪(323)设有拨动部(325),所述拨动部(325)沿着所述拨爪(323)的转动半径的径向延伸,且所述拨动部(325)的延伸距离大于所述拨爪(323)与所述弹性环(33)的间距。
6.根据权利要求2所述的大白菜包心捆扎机器人,其特征在于,所述大白菜包心捆扎机器人还包括升降机构(4),所述升降机构(4)与所述捆扎机构(3)连接,用于带动所述捆扎机构(3)朝向大白菜移动,从而通过大白菜抵顶所述拨板(322),带动所述拨板(322)转动。
7.根据权利要求1所述的大白菜包心捆扎机器人,其特征在于,沿朝向大白菜的方向,多个所述滑轨(31)朝向所述弹性环(33)中心倾斜。
8.根据权利要求1所述的大白菜包心捆扎机器人,其特征在于,所述滑轨(31)朝向大白菜的一端设有限位凸起(311),所述限位凸起(311)沿着远离所述弹性环(33)中心的方向延伸,用于防止所述弹性环(33)从所述滑轨(31)脱落。
9.根据权利要求1所述的大白菜包心捆扎机器人,其特征在于,所述机械夹(22)朝向大白菜的一侧设有弹性件(23),所述机械夹(22)通过所述弹性件(23)与大白菜抵接。
10.根据权利要求9所述的大白菜包心捆扎机器人,其特征在于,所述机械夹(22)朝向大白菜的一侧还设有压力传感器(24),所述压力传感器(24)用于检测所述机械夹(22)与大白菜抵接时的压力,当压力传感器(24)检测到预设压力值信号时,所述夹持电机(21)控制所述机械夹(22)停止运动。
技术总结本发明提供一种大白菜包心捆扎机器人,用于捆扎生长周期内的大白菜,包括:移动架,移动架设有安装支架以及连接于安装支架的移动部,移动部用于带动安装支架移动;夹持机构,连接于安装支架,夹持机构设有夹持电机以及两个相对布置的机械夹,电机与两个机械夹传动连接,用于控制两个机械夹相向运动;捆扎机构,连接于安装支架,捆扎机构设有多个滑轨、驱动机构以及多个弹性环,多个滑轨在安装支架上环形布置,用于撑开弹性环,多个弹性环在述滑轨上依次排布,驱动机构连接于滑轨并与弹性环传动连接,用于将弹性环从滑轨上拨离。本申请中大白菜包心捆扎机器人通过机械夹将大白菜夹紧,然后利用驱动机构将弹性环从滑轨上拨离,通过弹性环自带的弹力收紧。技术研发人员:王暾,张行,徐光政,杨鑫,杨文博,芦连生,李明昊,王广胜受保护的技术使用者:中国石油大学(北京)技术研发日:技术公布日:2024/12/2本文地址:https://www.jishuxx.com/zhuanli/20241204/340760.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表