一种伺服电机驱动的交叉摇摆结构的制作方法
- 国知局
- 2024-12-06 12:18:19
本发明涉及农业生产,尤其涉及一种伺服电机驱动的交叉摇摆结构。
背景技术:
1、我国是一个农业大国,从2023年世界机器人大会后,我国机器人领域正在将自动化机械设备与传统农业结合起来,向着高度智能的机器人方向发展。
2、其中,农业打药机器人作为取代人工打药成为新的趋势。主要在于其能提高作业效率,避免药液对人体的伤害,减少人工投入,提高经济效率。目前市面上打药机器人主要是固定式。
3、由于打药机器人的固定式喷药结构主要依靠喷射覆盖,液体颗粒的喷射轨迹主要呈直线型,对于复杂的果树树叶形状,存在部分遮挡,药液颗粒无法到达遮挡位置,着药率低。
技术实现思路
1、本发明的目的在于提供一种伺服电机驱动的交叉摇摆结构,旨在解决现有打药机器人药液喷射轨迹呈直线,对于复杂的果树树叶形状,存在部分遮挡,着药率低的问题。
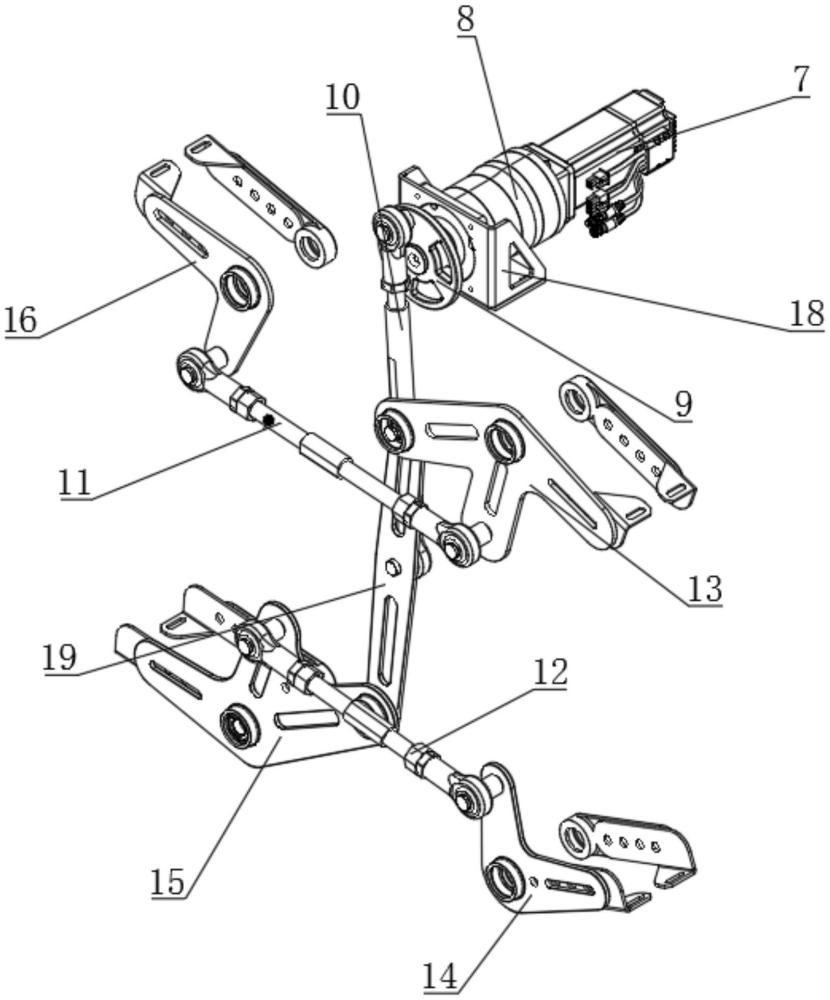
2、为实现上述目的,本发明提供了一种伺服电机驱动的交叉摇摆结构,包括安装连板焊接组件、管路组件和驱动连杆组件,所述安装连板焊接组件设置于所述驱动连杆组件一侧,所述管路组件设置于所述驱动连杆组件一侧,所述驱动连杆组件包括驱动电机、驱动轴、主驱动杆、上调节杆、下调节杆、右上摇臂、右下摇臂、左下摇臂、左上摇臂、电机固定座和中间连接板;所述驱动电机设置于所述电机固定座一侧,所述驱动轴与所述驱动电机固定连接,且位于所述驱动电机一侧,所述主驱动杆设置于所述驱动轴一侧,所述中间连接板与所述主驱动杆固定连接,且位于所述主驱动杆远离所述驱动轴一侧,所述右上摇臂和所述左下摇臂分别设置于所述中间连接板两侧,所述上调节杆设置于所述右上摇臂一侧,所述左上摇臂设置于所述上调节杆远离所述右上摇臂一侧,所述下调节杆设置于所述左下摇臂一侧,所述右下摇臂设置于所述下调节杆远离所述左下摇臂一侧。
3、其中,所述驱动电机包括电机本体和减速机,所述减速器与所述电机固定座固定连接,且位于所述电机固定座一侧,所述电机本体与所述减速机固定连接,且输出端与所述驱动轴连接,并贯穿所述减速机。
4、其中,所述安装连板焊接组件包括安装连接板和主旋转轴,所述安装连接板设置于所述电机固定座一侧,所述主旋转轴设置于所述安装连接板一侧。
5、其中,所述管路组件包括电磁阀、电磁阀连接板、高压管路、喷管焊接组件和喷头,所述电磁阀连接板与所述安装连接板固定连接,且位于所述安装连接板靠近所述主旋转轴一侧,所述电磁阀与所述电磁阀连接板固定连接,且位于所述电磁阀连接板一侧,所述高压管路与所述电磁阀连接,且位于所述电磁阀一侧,所述喷管焊接组件与所述高压管路连通,且位于所述高压管路远离所述电磁阀一侧,所述喷头与所述喷管焊接组件连通,且位于所述喷管焊接组件远离所述高压管路一侧。
6、其中,所述高压管路包括高压管路本体和连接管,所述高压管路本体与所述电磁阀连通,且位于所述电磁阀一侧,所述连接管与所述高压管路本体一侧。
7、本发明的一种伺服电机驱动的交叉摇摆结构,所述驱动轴通过平键连接及螺栓连接到所述驱动电机上,所述主驱动杆通过鱼眼轴承连接到所述驱动轴上,所述主驱动杆另一端通过鱼眼轴承连接到所述中间连接板上的焊接转轴,所述中间连接板两端的转轴分别与所述右上摇臂的轴承及所述左下摇臂的轴承连接,所述上调节杆左鱼眼轴承与所述左上摇臂的焊接转轴连接,所述上调节杆右鱼眼轴承与所述右上摇臂的焊接转轴连接,所述下调节杆的左鱼眼轴承与所述左下摇臂的焊接转轴连接,所述下调节杆的右鱼眼轴承与所述右下摇臂的焊接转轴连接。
8、所述安装连板焊接组件对所述管路组件和所述驱动连杆组件提供安装场所,所述驱动电机降速增扭后带动所述驱动轴旋转,所述驱动轴带动所述主驱动杆的上鱼眼轴承做圆周运动,所述主驱动杆上的焊接转轴带动所述中间连接板,所述中间连接板带动所述右上摇臂,所述右上摇臂通过所述上调节杆带动所述左上摇臂;所述中间连接板的下焊接转轴带动所述左下摇臂运动,所述左下摇臂通过所述下调节杆带动所述右下摇臂运动,使得所述右上摇臂、所述右下摇臂、所述左下摇臂、所述左上摇臂绕所述安装连板焊接组件上的所述主旋转轴按照一定角度的上下往复运动,从而带动所述管路组件做上下往复运动,模拟人打药时上下浮动喷药,向上、向下扫略使得叶面、叶背受药率更高,所述安装连板焊接组件对所述解决现有打药机器人药液喷射轨迹呈直线,对于复杂的果树树叶形状,存在部分遮挡,着药率低的问题。
技术特征:1.一种伺服电机驱动的交叉摇摆结构,其特征在于,
2.如权利要求1所述一种伺服电机驱动的交叉摇摆结构,其特征在于,
3.如权利要求1所述一种伺服电机驱动的交叉摇摆结构,其特征在于,
4.如权利要求3所述一种伺服电机驱动的交叉摇摆结构,其特征在于,
5.如权利要求4所述一种伺服电机驱动的交叉摇摆结构,其特征在于,
技术总结本发明涉及农业生产技术领域,具体涉及一种伺服电机驱动的交叉摇摆结构,包括安装连板焊接组件、管路组件和驱动连杆组件,驱动连杆组件包括驱动电机、驱动轴、主驱动杆、上调节杆、下调节杆、右上摇臂、右下摇臂、左下摇臂、左上摇臂、电机固定座和中间连接板;驱动电机带动驱动轴旋转,驱动轴带动主驱动杆做圆周运动,主驱动杆带动中间连接板,中间连接板带动右上摇臂,右上摇臂通过上调节杆带动左上摇臂;中间连接板带动左下摇臂运动,左下摇臂通过下调节杆带动右下摇臂运动,使得右上摇臂、右下摇臂、左下摇臂、左上摇臂绕驱动轴按照一定角度的上下往复运动,带动管路组件做上下往复运动,从而上下浮动喷药,使得叶面、叶背受药率更高。技术研发人员:杜春雷,朱义坤,陈卿云受保护的技术使用者:重庆廷捷机器人有限公司技术研发日:技术公布日:2024/12/2本文地址:https://www.jishuxx.com/zhuanli/20241204/340569.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表