一种智慧变电站废旧电池暂存中心及工作方法与流程
- 国知局
- 2024-12-06 12:18:15
本发明属于废旧电池处理,具体涉及一种智慧变电站废旧电池暂存中心及工作方法。
背景技术:
1、根据《国家危险废物名录》,电力企业报废的电力用铅酸蓄电池和变压器油等被列入危险废物名录,电力企业电厂、变电站数量巨大、分布广泛,产生大量危险废物,且具有以下特点:
2、储存场所建设大多不符合环保技术标准要求;
3、量大且较为分散,管控难度较大;
4、储存场所设计、选址的技术控制手段欠缺,防渗涂层、废液收集池、安全防护设备配置不尽统一,多数不达标;
5、相关法律中规定,贮存危险废物必须采取符合国家环境保护标准的防护措施,目前,电力企业设立的暂存仓库大都不符合《危险废物贮存污染控制标准》要求,不适合长时间大量存储危险废物。
6、目前存在采用独立的建筑或设备进行电池收集,但大多为手动放置,少有机器人进行自动仓储,机器人仓储的无人化符合现有技术发展方向,可以克服集中存放的危险系数。现有技术中有采用两侧夹紧的物料取出方式,但是采用两侧夹紧的方式需要同层物料之间留有足够的空隙,并且也不能有货架的阻挡才能实现抓取。例如cn201711331024.5夹臂、夹持组件以及使用该夹持组件的搬运器。因此不适配搬运较重的电池箱。相比有以下缺点:
7、1)缺乏旋转结构,无法实现旋转动作,挂钩连接托盘位置与货架呈90°;
8、2)夹臂式的搬运结构需要较长的活动空间来实现旋转动作;
9、3)在搬运中直线运动和转向运动分割,分布进行动作,因此需要较长的搬运时间,降低了存储效率。
10、因此,需要如本发明中提及的一种智慧变电站废旧电池暂存中心及工作方法。
技术实现思路
1、本发明的目的在于提供一种智慧变电站废旧电池暂存中心及工作方法,以解决上述背景技术中提出的问题,能够有效的提高废旧电池的无人化仓储,且具有实施监控,较低温度和防火防电池液泄漏的技术效果,可以解决上述背景技术中的问题。
2、为实现上述目的,本发明提供如下技术方案:
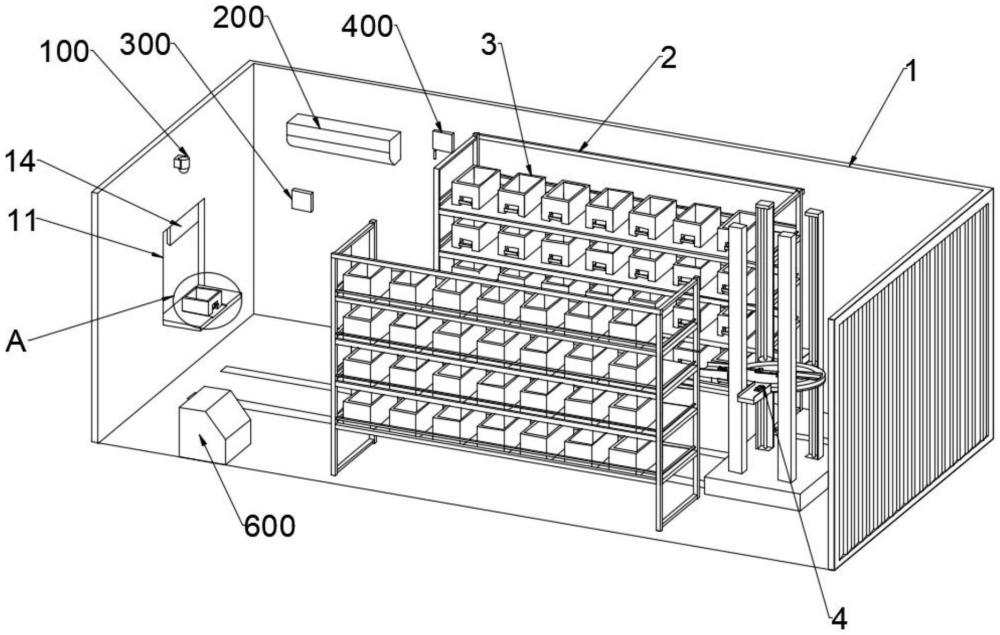
3、一种智慧变电站废旧电池暂存中心,包括:
4、箱式壳体,在箱式壳体内开设有交互口,交互口内安装有放料平台;
5、仓储架,所述仓储架设置有两排,且仓储架上设置有多个排列仓储位置;
6、电池箱,所述电池箱的壳体上设置有把手,放置在放料平台内的电池箱的把手方向均朝向仓储架;所述电池箱内放置有废旧电池;
7、搬运机器人,包括底部箱体、升降架和作业平台;所述箱式壳体的底部开设有导向槽,且导向槽与仓储架平行设置;所述底部箱体内安装有行走电机,所述底部箱体沿导向槽驱动搬运机器人移动,所述升降架带动作业平台竖向升降,所述作业平台适于承载电池箱;
8、作业平台内安装有伸缩件、调节件和转向件;
9、伸缩件的端部安装有长条挂钩和电磁吸铁;
10、调节件包括顶升部件和行程开关;所述顶升部件向上活动抵接长条挂钩,带动长条挂钩活动连接带动把手;在长条挂钩牵引电池箱通过调节件时,同步驱动电磁吸铁和转向件工作;
11、所述转向件安装在作业平台内,适于带动伸缩件和位于作业平台和电池箱旋转。
12、更进一步的技术方案中,所述底部箱体的内壁与行走电机的机身相固定连接,且行走电机的输出端安装有锥齿轮一,所述底部箱体内安装有从动杆和主动杆,主动杆与从动杆平行设置;
13、所述主动杆上安装有锥齿轮二,所述锥齿轮一和锥齿轮二相啮合;所述主动杆和从动杆的两端均安装有滚轮;所述滚轮适于安装在导向槽内,且沿导向槽前进或后退;所述导向槽设置有平行的两组。
14、更进一步的技术方案中所述伸缩件包括横向推杆,所述横向推杆的杆身安装在作业平台上,且输出端安装有折叠轨架,所述折叠轨架包括多个分支板,且顶部分支板与横向推杆的输出端相连接;
15、位于顶部的分支板上安装有固定块,所述固定块背对横向推杆的一侧安装有长条挂钩,所述长条挂钩的顶部水平高度低于把手底部的高度。
16、更进一步的技术方案中所述固定块上开设有安装腔,所述长条挂钩的端部旋转安装在安装腔内,所述安装腔内安装有下压弹簧、调节片和调节螺杆,所述安装腔上开设有调节螺孔,所述调节螺杆螺纹连接安装在调节螺孔内;所述调节片的两端顶部与下压弹簧的底部相固定连接,所述下压弹簧的顶部与安装腔的内壁相固定连接;
17、所述调节螺杆的底部活动抵接在调节片的上部,且适于抵接在长条挂钩上表面。
18、更进一步的技术方案中所述作业平台上开设有调节槽,所述调节件安装在调节槽内;所述调节件还包括位置筒,所述位置筒内中空设置,且两侧开设有通槽,高度不高于调节槽的高度;
19、所述顶升部件包括顶升推杆,顶升推杆的输出端上安装有弯折板,弯折板适于穿过位置筒;弯折板的一端与顶升推杆的输出端相连接,位于顶升推杆轴线上的弯折板的顶部安装有位置座,所述位置座的顶部与长条挂钩相活动抵接;位置座上安装有滚珠一;
20、弯折板的另一端位于行程开关的顶部,且行程开关的动触点与弯折板活动抵接。
21、更进一步的技术方案中所述位置筒内安装有支撑弹簧,所述支撑弹簧的顶部与弯折板的底部相固定连接,所述支撑弹簧的底部与调节槽的内壁相固定连接;
22、位于顶升推杆顶部的弯折板的高度低于位于行程开关的顶部的弯折板的高度;弯折板的两端均向下弯折。
23、更进一步的技术方案中所述转向件包括转动圆板,所述横向推杆安装在转动圆板上;所述作业平台内开设有安装圆槽,所述安装圆槽内设置有阶梯面,所述转动圆板安装在阶梯面内;所述转动圆板的底部安装有底部筒,且底部筒的底部开设有外齿形,所述底部筒的底部穿过安装圆槽;
24、所述底部筒外部安装有连接轴承,所述连接轴承的内圈与底部筒相固定连接,连接轴承的外圈与作业平台相固定连接;
25、所述作业平台的底部安装有安装架,所述安装架安装在外齿形外端;所述安装架的底部安装有转向电机,所述转向电机的输出端安装有驱动齿轮,所述驱动齿轮与外齿形相啮合;转向电机为步进电机;
26、所述安装架的底部高度低于驱动齿轮的高度。
27、更进一步的技术方案中所述升降架包括架体,架体内安装有竖向丝杠,竖向丝杠上安装有螺母座;
28、所述竖向丝杠设置有四组,呈矩形分布;所述螺母座的底部安装有底撑板,所述底撑板的顶部高度低于安装架的底部高度;所述作业平台上设置有耳板,所述耳板与螺母座的顶部相固定连接;必要时,参考现有技术,在螺母座的底部安装有防掉落结构,避免丝杠上的螺母座向上爬升时,出现掉落问题。
29、竖向丝杠的底部贯穿至底部箱体内并安装有底部齿轮一,所述底部箱体内还安装有升降电机和大齿盘,所述升降电机的输出端安装有底部齿轮二,大齿盘的内外均开设有齿形,且大齿盘的外端与底部齿轮一相啮合,大齿盘内的齿形与底部齿轮二相啮合;
30、在大齿盘的上开设有上下的凹口槽,且在底部箱体内安装有环形板,环形板上安装有滚珠二,滚珠二与凹口槽内向适配,且上下两侧安装滚珠二适于限制大齿盘的安装位置。
31、更进一步的技术方案中,所述箱式壳体内还安装有监控设备、调温设备、气体监测设备、温湿度监测设备、照明设备、自动充电桩、自动灭火装置和数据处理设备,所述交互口的外部安装有数据交互板,数据交互板适于显示存储数量与位置;所述自动充电桩位于导向槽的侧部。
32、一种智慧变电站废旧电池暂存中心的工作方法,包括以下步骤:
33、步骤1,人工将废旧电池放入电池箱,放料平台上设置有单向凹槽,电池箱放置在放料平台的单向凹槽上,电池箱的把手朝向搬运机器人;
34、步骤2,在数据交互板上记录信息,选择合适仓储位置并驱动搬运机器人取货;
35、步骤3,搬运机器人动作步骤:
36、a.依据步骤2所填仓储位置,数据交互板发出信号,底部箱体接收信号,行走电机启动,带动锥齿轮一啮合锥齿轮二,推动滚轮前进,由感应器感应至位置处时,行走电机关闭;
37、b.与步骤a同步,驱动横向推杆动作输出,横向推杆推动折叠轨架展开,长条挂钩延展至极限位置,至把手的底部;
38、c.顶升推杆动作,带动弯折板向上和顶部的位置座抵接在长条挂钩的底部,向上使得长条挂钩弯曲且连接把手;
39、d.顶升推杆保持不动,横向推杆回缩,长条挂钩贴合位置座上的滚珠一运动,并带动电池箱进入作业平台;
40、e.作业平台上安装有位置传感器,电池箱达到遮挡位置传感器的感应端后,发出信号至数据处理设备;
41、传输时间延迟m秒,顶升推杆回缩至步骤b位置处;
42、f.位于行程开关同轴高度的弯折板高于位于顶升推杆的弯折板高度,且位于行程开关同轴高度的弯折板的顶部安装有滚筒,滚筒的顶部高度低于滚珠一的顶部高度;
43、电池箱通过顶升推杆顶部位置向下挤压滚动珠一,电池箱底部抵接弯折板,弯折板的底部抵接行程开关,行程开关发出信号,信号发送至数据处理设备处,数据处理设备发出信号,转向件在安装架内安装有控制器,控制器接收信号,控制转向电机运动;
44、g.电池箱通过弯折板后进入转动圆板,随转动圆板转动,实现横向推杆和电池箱的转向,由转向电机控制转动方向和转动角度;依据为数据交互板中的选择的仓储位置,选择转动方向以及升降电机的工作时间;
45、h.方向确认旋转后,升降电机工作,通过底部齿轮一和底部齿轮二带动竖向丝杠的同步旋转,带动作业平台升降,升降至高度位置处;
46、i.与步骤h同步的,行走电机反转,驱动滚轮后退,至仓储位置的水平位置处;
47、j.横向推杆输出动作,推动电池箱前进,抵接在弯折板的上,弯折板向下抵接位于作业平台两侧的行程开关,行程开关发出信号,信号发送至数据处理设备处,数据处理设备发出信号,转向电机停止转动;后通过底部的位置筒和顶升推杆;
48、k.长条挂钩的挂钩端部随电池箱的下降又挂接在把手上,随横向推杆推动完成下料至仓储位置处;升降电机反转,至长条挂钩下降距离a,下降距离a小于把手至电池箱的底部高度;
49、m.横向推杆回缩至初始位置,转向件反转,使长条挂钩对应交互口方向;升降电机反转继续使作业平台下降至初始位置处;
50、n.搬运机器人完成单次废旧电池的存储动作,完成后回到自动充电桩处;
51、步骤4,数据处理设备更新库存信息;
52、步骤5,废旧电池的取出步骤,在作业平台的两侧均安装有调节件,动作步骤重复步骤3,对应横向推杆的初始方向为朝向仓储架,且调整水平和高度与仓储位置相同。
53、初始位置:弯折板位于顶升推杆的位置座位于调节槽内,但滚动珠一的顶部位于调节槽外;弯折板上的滚筒位于调节槽内,且顶部高度均低于折叠轨架的顶部分支板的底部高度,防止移动出现干涉。在搬运机器人工作时,初始位置的顶升推杆带电,进行带动弯折板的位置调整:初始位置不是顶升推杆的输出极限位置处,即不是最低输出位置处。
54、抵接位置:弯折板两端均在调节槽槽外;步骤c的顶升推杆带动弯折板处于抵接位置;而位于滚筒位置的弯折板受压弯折。
55、受压位置:弯折板两端均在调节槽槽内;步骤f的电池箱压制弯折板在调节槽内,带动弯折板处于受压位置。
56、有益效果
57、(1)本发明通过顶升推杆动作,带动弯折板向上和顶部的位置座抵接在长条挂钩的底部,向上使得长条挂钩弯曲且向上连接把手,从而实现对电池箱的牵引动作,从而实现基本的移动效果。
58、(2)本发明通过长条挂钩贴合位置座上的滚珠一运动,并带动电池箱进入作业平台;作业平台上安装有位置传感器,电池箱达到遮挡位置传感器的感应端后,后延迟顶升推杆回缩,实现保持牵引效果。电池箱通过顶升推杆顶部位置向下挤压滚动珠一,电池箱底部抵接弯折板,弯折板的底部抵接行程开关,实现电磁吸铁吸附长条挂钩,实现继续牵引的效果。
59、(3)调节件安装在分支轨道上,且在作业平台上安装有3组分支轨道,采用带动电池箱挤压调节件,实现在移动过程中实现自动控制转向效果,且相比夹取方式搬运具有良好的稳定效果,可以实现稳定搬运。
60、(4)本发明通过在长条挂钩的端部安装调节片与调节螺母,实现对长条挂钩的初始角度的调节,可以进一步使得初始的顶升推杆可以较为容易实现顶升,从而弯曲长条挂钩。
61、(5)本发明通过安装大齿盘在多组的底部齿轮一和底部齿轮二之间,实现了形成齿轮副实现多组传动效果,而在大齿盘上的凹口槽与外部齿形之间设置肋板进行支撑,降低大齿盘的重量,避免采用大齿轮导致的质量过大。通过在凹口槽上下两侧安装滚珠二,适于限制大齿盘的安装位置,实现稳定传动且降低底部箱体质量,便于移动的效果。
本文地址:https://www.jishuxx.com/zhuanli/20241204/340560.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表