一种物流散件智能拣选机器人的制作方法
- 国知局
- 2024-12-06 12:18:16
本发明涉及拣选机器人,具体为一种物流散件智能拣选机器人。
背景技术:
1、在自动化仓库或是物流中心,需要根据订单将商品从货架或是货垛上取出,以便于后期将物流散件打包好后运输到各个地方,传统的通过人工手动拣选,这样不仅增加了人工成本,还使得拣选的效率较慢,因此目前市场上出现了智能拣选机器人,来对物流散件进行智能拣选,这样不仅可提高拣选的工作效率,还可减轻了工作人员的工作量。
2、现有技术中申请号为“cn202010719392.2”专利名称为“一种3d拣选物流机器人”,其公开了货物放置在承载机体的第一矩形凹槽中;两个竖直攀爬动力体通过四个行走轮带动承载机体在货架中的通道移动;当移动到货架指定位置后,两个竖直攀爬动力体竖直向上伸出承载机体,行走轮离地;每组攀爬主动轮和攀爬从动轮从两侧夹紧链条,实现滚动配合;在攀爬主动轮带动下,竖直攀爬动力体带动承载机体竖直向上沿链条向上攀爬;当攀爬至目标货物位置时,中臂相对于外臂水平伸出,内臂相对于中臂水平伸出;同时,两侧的阻拦装置向下翻转至水平状态,伸出的内壁实现对货物的推出;两侧的阻拦装置实现对夹取货物的限位;实现将货物放置在货架后,两侧的阻拦装置向上翻转至贴近内臂;收缩中臂和内臂,完成放货。
3、现有技术中申请号为“cn201610090567.1”专利名称为“自动拣选机器人”,其公开了驱动电机工作,驱动轮旋转行走,辅助万向轮保证机器人车体的平衡,导向轮确保机器人正常行走不发生歪斜,通过外部固定的轨道,到达指定货位;提升电机工作,将伸缩臂机构提升至高位后停止运转;伸缩臂机构中的伸缩板通过伸缩电机驱动,伸出,到达预定位置后停止工作;提升电机再次运转,反转将伸缩臂机构送至低位,即适合抓取货物的高度(调试时确认),机械夹臂抓取货物;确认货物被抓取后,提升电机工作,伸缩臂机构提升至高位,提升电机停止运行,伸缩电机工作,伸缩板回到原点,即在车体上的原始位置;提升电机工作,将伸缩臂机构下降到预定位置后,机械夹臂打开,货物放于车体内的货物托盘上;机械夹臂合上,提升电机将伸缩臂机构提升至原点,完成动作,等待下一次抓取任务;待所需货物全部拣选后,通过轨道返回至拣选站,送出货物,完成出库任务,本发明机器人可以一次任务取多个货物,也可以多个任务一次完成。
4、上述中的智能拣选机器人在使用时,当机械夹臂抓取物流散件后,将物流散件从货架上拣选出来时,若物流散件整体的重量较重时,这时需要机械夹臂施加较大的力才能将物流散件从货架上拉出,使得机器人不能很好的将物流散件拉出,从而影响智能拣选机器人的拣选作业。
5、所以我们提出了一种物流散件智能拣选机器人,以便于解决上述中提出的问题。
技术实现思路
1、本发明的目的在于提供一种物流散件智能拣选机器人,以解决上述背景技术提出的目前市场上智能拣选机器人在使用时,当机械夹臂抓取物流散件后,将物流散件从货架上拣选出来时,若物流散件整体的重量较重时,这时需要机械夹臂施加较大的力才能将物流散件从货架上拉出,使得机器人不能很好的将物流散件拉出,从而影响智能拣选机器人的拣选作业的问题。
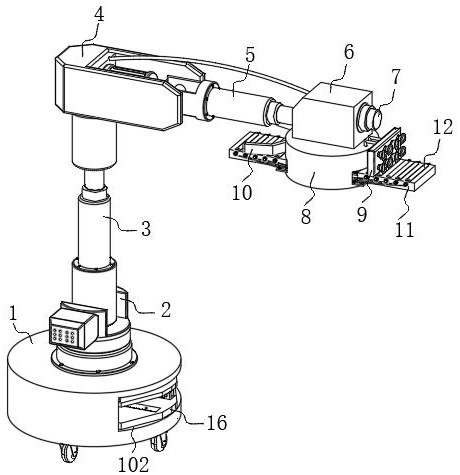
2、为实现上述目的,本发明提供如下技术方案:一种物流散件智能拣选机器人,包括用于控制移动行走的机器人底座,以及安装在机器人底座上的第一控制座;
3、第一控制座的上方连接有第一伸缩机械臂;
4、所述第一伸缩机械臂的上方安装有第二控制座,第二控制座的右侧连接有第二伸缩机械臂,第二伸缩机械臂的右端安装有第三控制座;
5、所述第三控制座的底面安装有安装盘,第三控制座的右侧面安装有搜寻机构;
6、所述安装盘的右侧面安装有吸盘结构的第一拣选抓取机构,安装盘的左侧面安装有夹爪结构的第二拣选抓取机构;
7、所述安装盘的内部开槽对称安装有托板,托板设置在第一拣选抓取机构和第二拣选抓取机构的下方;
8、所述托板的内部开槽嵌入设置有滚动柱,滚动柱的内部贯穿安装有转动杆,转动杆的两端均贯穿托板的两侧面,转动杆的一端外侧安装有自动旋转调控组件。
9、优选的,所述托板的底面安装有限位块;
10、所述安装盘的内部开槽安装有限位杆,限位杆的一端外侧嵌套连接有推动弹簧,限位杆的另一端贯穿滑动连接有限位块。
11、优选的,所述托板的个数与安装盘的个数呈2:1设置,托板的最高点低于滚动柱的最高点。
12、优选的,所述自动旋转调控组件包括五根控制绳,五根控制绳的一端均通过导向轮组件与安装盘的内壁相连接,五根控制绳的另一端分别缠绕在五组转动杆的外端上。
13、优选的,所述转动杆的另一端外侧嵌套连接有涡旋弹簧,涡旋弹簧的一端与限位块的表面相连接,涡旋弹簧的另一端与转动杆相连接。
14、优选的,所述滚动柱通过转动杆构成旋转结构,滚动柱与转动杆呈一一对应设置。
15、优选的,所述自动旋转调控组件包括一根控制绳和链轮组件,所述控制绳的一端通过导向轮组件与安装盘的内壁相连接,控制绳的另一端缠绕连接在其中一组转动杆的外端上;
16、五组转动杆的外端通过链轮组件构成同步传动结构。
17、优选的,所述机器人底座的内部开设有容置槽,容置槽内通过滑块滑动连接有底板,底板的上方连接有放置板。
18、优选的,所述底板的上表面内部开槽安装有滑动杆,滑动杆的外侧嵌套连接有连接弹簧,滑动杆的一端外侧滑动连接有滑动座;
19、连接弹簧的一端与滑动座相连接,滑动座的上方连接有调控杆,调控杆的上方连接有放置板。
20、优选的,所述底板内开设有锁定孔;
21、所述滑动座的内部开槽安装有呈“l”形状结构的锁定杆,锁定杆的一侧通过复位弹簧与滑动座内壁相连接,锁定杆的下端插入到锁定孔内,锁定杆与锁定孔一一对应设置,锁定杆的上端贯穿滑动座的上表面。
22、与现有技术相比,本发明的有益效果是:该物流散件智能拣选机器人,滚动柱旋转时,可对上方的物流散件施加一个向第一拣选抓取机构或第二拣选抓取机构方向的推力,从而使得第一拣选抓取机构或第二拣选抓取机构无需施加较大的力就可将重量较重的物流散件从货架上拉出,从而使得智能拣选机器人很好的将重量较重的物流散件进行拣选拿出,提高了工作效率,其具体内容如下:
23、(1)第一拣选抓取机构或第二拣选抓取机构对物流散件夹紧抓取后,第一拣选抓取机构或第二拣选抓取机构将物流散件从货架上向外拉出时,此时托板通过推动弹簧的蓄力自动向货架的方向移动,从而使得托板在物流散件的底面进行移动,此时通过自动旋转调控组件自动带动托板上表面的滚动柱进行旋转,从而使得滚动柱旋转时,可对上方的物流散件施加一个向第一拣选抓取机构或第二拣选抓取机构方向的推力,从而使得第一拣选抓取机构或第二拣选抓取机构无需施加较大的力就可将重量较重的物流散件从货架上拉出,从而使得智能拣选机器人很好的将重量较重的物流散件进行拣选拿出,提高了工作效率。
24、(2)自动旋转调控组件包括五根控制绳,因此使得托板向外移动的同时,五根控制绳可自动带动五组转动杆进行旋转,从而使得五组转动杆自动带动五组滚动柱进行旋转,无需使用动力源,节约了能源;
25、(3)自动旋转调控组件包括一根控制绳和链轮组件,因此使得托板向外移动的同时,一根控制绳可自动带动一组转动杆进行旋转,一组转动杆旋转时通过链轮组件自动带动另外四组转动杆进行旋转,从而使得五组转动杆自动带动五组滚动柱进行旋转,无需使用动力源,节约了能源;
26、(4)通过调控杆可对放置板的高度位置进行调节,从而便于将外界的放置框放置在放置板,从而便于将拣选出来的物流散件放置在放置框内,便于后期拣选结束后,统一运输到工作区域;
27、(5)通过锁定杆插入到对应的锁定孔内,便于对旋转呈竖直状态的调控杆下方的滑动座进行锁定,避免滑动座移动,从而保证上升后的放置板的稳固性。
本文地址:https://www.jishuxx.com/zhuanli/20241204/340563.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表