浮空器囊体装车控制方法及装置
- 国知局
- 2024-12-06 12:30:21
本发明涉及浮空器,尤其涉及一种浮空器囊体装车控制方法及装置。
背景技术:
1、浮空器囊体是浮空器的核心组成部分,其安全状况直接影响飞行试验的顺利实施。浮空器囊体为柔性体,不同型号的囊体大小不一,当囊体处于平铺状态时,其长度从几m至百m长,重量也从几公斤至几吨量级。囊体为薄膜复合材料,与刚性结构接触后极易受到损伤,影响其气密性。因此对于小型浮空器,一般采用人力搬运的方式将囊体搬至运输设备。
2、然而,对于大型浮空器而言,其囊体较长且质量较大,传统采用人力进行装车运输的方式存在着运力不足,且易在装车运输的过程中对囊体揉搓造成损坏,影响囊体的气密性。
技术实现思路
1、本发明提供一种浮空器囊体装车控制方法及装置,用以解决现有技术中采用人力进行装车运输的方式存在着运力不足,且易在装车运输的过程中对囊体揉搓造成损坏,影响囊体的气密性的缺陷。
2、本发明第一方面提供一种浮空器囊体装车控制方法,包括如下步骤。
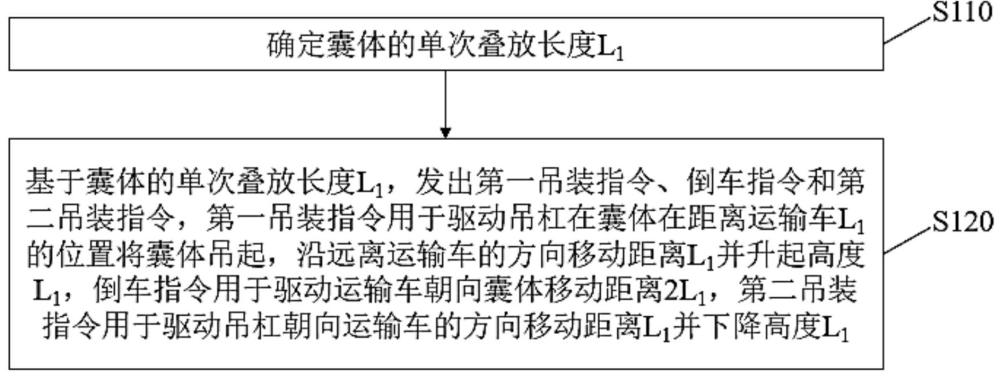
3、s110、确定囊体的单次叠放长度l1。
4、s120、基于所述囊体的单次叠放长度l1,发出第一吊装指令、倒车指令和第二吊装指令,所述第一吊装指令用于驱动吊杠在所述囊体在距离运输车l1的位置将所述囊体吊起,沿远离所述运输车的方向移动距离l1并升起高度l1,所述倒车指令用于驱动所述运输车朝向所述囊体移动距离2l1,所述第二吊装指令用于驱动所述吊杠朝向所述运输车的方向移动距离l1并下降高度l1。
5、重复上述步骤s120,以将所述囊体按照单次叠放长度l1多层叠放于所述运输车。
6、根据本发明提供的浮空器囊体装车控制方法,所述第一吊装指令包括吊杠的吊装位置信息和所述吊杠的第一移动路径信息,所述倒车指令包括所述运输车的移动路径信息,所述第二吊装指令包括所述吊杠的第二移动路径信息。
7、根据本发明提供的浮空器囊体装车控制方法,所述吊杠的第一移动路径信息包括所述吊杠的第一水平移动速度v1、第一竖直移动速度v2以及第一移动时间t1,所述运输车的移动路径信息包括所述运输车的水平移动速度v3以及移动时间t2,所述吊杠的第二移动路径信息包括所述吊杠的第二水平移动速度v4、第二竖直移动速度v5以及第二移动时间t2。
8、其中,l1=v1·t1=v2·t1=v3·t2。
9、根据本发明提供的浮空器囊体装车控制方法,所述吊杠的第一水平移动速度v1与所述运输车的水平移动速度v3满足v3≤2v1。
10、根据本发明提供的浮空器囊体装车控制方法,所述吊杠的第一水平移动速度v1与所述运输车的水平移动速度v3满足v3=2v1。
11、根据本发明提供的浮空器囊体装车控制方法,所述确定囊体的单次叠放长度l1,包括如下步骤。
12、获取所述运输车的长度参数l0。
13、基于所述运输车的长度参数l0,确定所述囊体的单次叠放长度l1。
14、根据本发明提供的浮空器囊体装车控制方法,所述运输车的长度参数l0与所述囊体的单次叠放长度l1满足:l1=l0。
15、本发明第二方面提供一种基于如上所述的浮空器囊体装车控制方法的装置,包括:获取模块和控制模块。
16、所述获取模块用于获取所述运输车的长度数据,所述控制模块用于基于所述运输车的长度数据发出所述第一吊装指令、所述倒车指令和所述第二吊装指令。
17、本发明第三方面提供一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序时实现如上所述的浮空器囊体装车控制方法的步骤。
18、本发明第三方面提供一种非暂态计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上所述的浮空器囊体装车控制方法的步骤。
19、本发明提供的浮空器囊体装车控制方法,通过确定囊体的单次叠放长度,并基于囊体的单次叠放长度发出第一吊装指令、倒车指令和第二吊装指令,第一吊装指令能够驱动吊杠在囊体在距离运输车l1位置将囊体吊起,沿远离运输车的方向移动距离l1并升起高度l1,倒车指令能够驱动运输车朝向囊体移动距离2l1,第二吊装指令能够驱动吊杠朝向运输车的方向移动距离l1并下降高度l1,从而实现浮空器囊体在装车的过程中,距离运输车较远的一侧不会在地面拖动,能够有效防止囊体损坏。本发明提供的浮空器囊体装车控制方法及装置,解决了现有技术中采用人力进行装车运输的方式存在着运力不足,且易在装车运输的过程中对囊体揉搓造成损坏,影响囊体的气密性的缺陷。
20、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:1.一种浮空器囊体装车控制方法,其特征在于,包括:
2.根据权利要求1所述的浮空器囊体装车控制方法,其特征在于,所述第一吊装指令包括吊杠的吊装位置信息和所述吊杠的第一移动路径信息,所述倒车指令包括所述运输车的移动路径信息,所述第二吊装指令包括所述吊杠的第二移动路径信息。
3.根据权利要求2所述的浮空器囊体装车控制方法,其特征在于,所述吊杠的第一移动路径信息包括所述吊杠的第一水平移动速度v1、第一竖直移动速度v2以及第一移动时间t1,所述运输车的移动路径信息包括所述运输车的水平移动速度v3以及移动时间t2,所述吊杠的第二移动路径信息包括所述吊杠的第二水平移动速度v4、第二竖直移动速度v5以及第二移动时间t2;
4.根据权利要求3所述的浮空器囊体装车控制方法,其特征在于,所述吊杠的第一水平移动速度v1与所述运输车的水平移动速度v3满足v3≤2v1。
5.根据权利要求4所述的浮空器囊体装车控制方法,其特征在于,所述吊杠的第一水平移动速度v1与所述运输车的水平移动速度v3满足v3=2v1。
6.根据权利要求1至5任一项所述的浮空器囊体装车控制方法,其特征在于,所述确定囊体的单次叠放长度l1,包括:
7.根据权利要求6所述的浮空器囊体装车控制方法,其特征在于,所述运输车的长度参数l0与所述囊体的单次叠放长度l1满足:l1=l0。
8.一种基于如权利要求1至7任一项所述的浮空器囊体装车控制方法的装置,其特征在于,包括:
9.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至7任一项所述的浮空器囊体装车控制方法的步骤。
10.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述的浮空器囊体装车控制方法的步骤。
技术总结本发明涉及浮空器技术领域,提供一种浮空器囊体装车控制方法及装置。该方法包括:S110、确定囊体的单次叠放长度L<subgt;1</subgt;;S120、基于囊体的单次叠放长度L<subgt;1</subgt;,发出第一吊装指令、倒车指令和第二吊装指令,第一吊装指令用于驱动吊杠在囊体在距离运输车L<subgt;1</subgt;的位置将囊体吊起,沿远离运输车的方向移动距离L<subgt;1</subgt;并升起高度L<subgt;1</subgt;,倒车指令用于驱动运输车朝向囊体移动距离2L<subgt;1</subgt;,第二吊装指令用于驱动吊杠朝向运输车的方向移动距离L<subgt;1</subgt;并下降高度L<subgt;1</subgt;;重复上述步骤S120,以将囊体按照单次叠放长度L<subgt;1</subgt;多层叠放于运输车。本发明解决了现有装车运输方式存在着运力不足,且易在装车运输的过程中对囊体揉搓造成损坏,影响囊体的气密性的缺陷。技术研发人员:栗颖思,何泽青,张向强,高衡,杨燕初,龚文韬,赵荣受保护的技术使用者:中国科学院空天信息创新研究院技术研发日:技术公布日:2024/12/2本文地址:https://www.jishuxx.com/zhuanli/20241204/341787.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表