一种集装箱锁孔识别定位方法、系统及计算机程序与流程
- 国知局
- 2024-12-06 12:59:39
本发明涉及集装箱识别领域,尤其涉及一种集装箱锁孔识别定位方法、系统及计算机程序。
背景技术:
1、海侧抓箱是指在集装箱码头的海侧区域,利用岸桥或其他吊装设备对停泊在码头边上的船舶上的集装箱进行抓取和搬运的过程。这一过程是集装箱码头自动化作业的重要组成部分,对于提高码头的作业效率和安全性具有重要意义。
2、在海侧抓箱任务中,对集装箱锁孔进行识别和定位,是快速完成抓箱任务的关键。而现有的集装箱锁孔识别定位方法,准确度不够,相邻集装箱的锁孔会对识别定位产生干扰,存在一定的漏检误检的现象,大大影响了抓箱任务的效率。
技术实现思路
1、鉴于目前技术存在的上述不足,本发明提供一种集装箱锁孔识别定位方法,通过构建基于位置约束全局注意力机制的目标识别模型,利用特征提取网络、全局自注意力编码网络和分类预测网络对集装箱锁孔进行识别定位,能增强模型对场景的正确理解,减少漏检误检现象,提高抓箱的准确度和作业效率。
2、为达到上述目的,本发明的实施例采用如下技术方案:
3、一种集装箱锁孔识别定位方法,包括以下步骤:
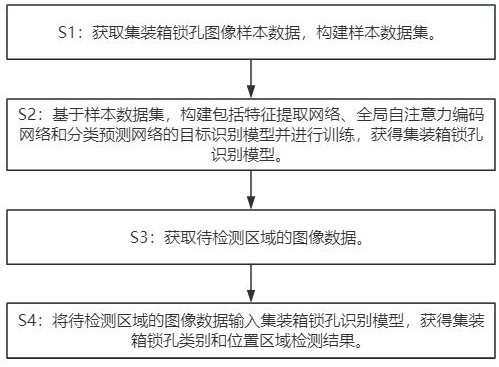
4、获取集装箱锁孔图像样本数据,构建样本数据集;
5、基于样本数据集,构建包括特征提取网络、全局自注意力编码网络和分类预测网络的目标识别模型并进行训练,获得集装箱锁孔识别模型;
6、获取待检测区域的图像数据;
7、将待检测区域的图像数据输入集装箱锁孔识别模型,获得集装箱锁孔类别和位置区域检测结果。
8、依照本发明的一个方面,所述集装箱锁孔识别定位方法还包括:对集装箱锁孔图像样本数据和待检测区域的图像数据通过高斯滤波进行降噪处理。
9、依照本发明的一个方面,所述特征提取网络包括:
10、基于残差网络为主干网络进行构建;
11、将图像数据输入到特征提取网络中,得到特征向量;
12、在提取特征向量的基础上,增加可学习的关系编码参数;
13、关系编码通过计算集装箱锁孔间的位置偏差、尺度比例、方向信息,生成关系向量,作为特征提取网络的输出。
14、依照本发明的一个方面,所述全局自注意力编码网络包括:
15、基于自注意力编码器进行构建;
16、自注意力编码器的核心部分为多头注意力模块;
17、自注意力编码器的各模块之间通过残差连接;
18、自注意力编码器的输入首先经过层归一化,再通过线性变换生成三个权重矩阵q、k、v来计算自注意力,获得关系感知特征,作为全局自注意力编码网络的输出;
19、全局自注意力编码网络的输入为特征提取网络的输出。
20、依照本发明的一个方面,所述分类预测网络包括:
21、基于多层感知器进行构建;
22、多层感知器由全连接层、dropout层和gelu激活函数构成;
23、分类预测网络的输入为全局自注意力编码网络输出的关系感知特征;
24、分类预测网络在关系感知特征上进行目标检测,输出集装箱锁孔类别和位置区域检测结果。
25、依照本发明的一个方面,所述集装箱锁孔识别定位方法还包括:
26、根据集装箱锁孔类别和位置区域检测结果,获取集装箱锁孔图像;
27、根据集装箱锁孔图像,查找与绘制锁孔轮廓,获得集装箱锁孔精确定位结果。
28、依照本发明的一个方面,所述根据集装箱锁孔图像,查找与绘制锁孔轮廓,获得集装箱锁孔精确定位结果包括:
29、对集装箱锁孔图像进行直方图均衡化和平滑滤波降噪处理,获得锁孔灰度图;
30、根据最大类间方差法,获取锁孔灰度图的二值化阈值;
31、根据阈值化函数,将锁孔灰度图转换为黑白二值图像,分割出锁孔轮廓,获得集装箱锁孔精确定位结果。
32、依照本发明的一个方面,所述根据最大类间方差法,获取锁孔灰度图的二值化阈值包括:
33、获取锁孔灰度图的灰度直方图;
34、遍历灰度级,假设当前灰度级为二值化阈值,分别计算当前阈值划分方式出现的频率及平均灰度;
35、根据当前阈值划分方式出现的频率及平均灰度,计算类间方差;
36、遍历所有灰度级,找到使类间方差最大的灰度级,即为最佳二值化阈值。
37、一种集装箱锁孔识别定位系统,基于如上所述的集装箱锁孔识别定位方法,包括:
38、样本构建模块,用于获取集装箱锁孔图像样本数据,构建样本数据集;
39、模型构建模块,用于基于样本数据集,构建包括特征提取网络、全局自注意力编码网络和分类预测网络的目标识别模型并进行训练,获得集装箱锁孔识别模型;
40、图像获取模块,用于获取待检测区域的图像数据;
41、检测模块,用于将待检测区域的图像数据输入集装箱锁孔识别模型,获得集装箱锁孔类别和位置区域检测结果。
42、一种计算机程序,所述计算机程序被执行时实现如上所述的集装箱锁孔识别定位方法的步骤。
43、本发明实施的优点:
44、本发明提供一种集装箱锁孔识别定位方法,通过构建基于位置约束全局注意力机制的目标识别模型,利用特征提取网络、全局自注意力编码网络和分类预测网络对集装箱锁孔进行识别定位,能增强模型对场景的正确理解,减少漏检误检现象,提高抓箱的准确度和作业效率。
45、本方法还通过提取目标识别模型检测出来的集装箱锁孔图像,进行直方图均衡化和降噪处理,获得锁孔灰度图;利用最大类间方差法,获得图像最佳二值化阈值,然后对图像进行二值化处理,查找与绘制锁孔轮廓,获得集装箱锁孔精确定位结果;能进一步提高集装箱锁孔识别和定位的精度,提高抓箱的准确度。
技术特征:1.一种集装箱锁孔识别定位方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的集装箱锁孔识别定位方法,其特征在于,所述集装箱锁孔识别定位方法还包括:对集装箱锁孔图像样本数据和待检测区域的图像数据通过高斯滤波进行降噪处理。
3.根据权利要求1所述的集装箱锁孔识别定位方法,其特征在于,所述分类预测网络包括:
4.根据权利要求1所述的集装箱锁孔识别定位方法,其特征在于,所述集装箱锁孔识别定位方法还包括:
5.根据权利要求4所述的集装箱锁孔识别定位方法,其特征在于,所述根据集装箱锁孔图像,查找与绘制锁孔轮廓,获得集装箱锁孔精确定位结果包括:
6.根据权利要求5所述的集装箱锁孔识别定位方法,其特征在于,所述根据最大类间方差法,获取锁孔灰度图的二值化阈值包括:
7.一种集装箱锁孔识别定位系统,其特征在于,基于权利要求1至6任一项所述的集装箱锁孔识别定位方法,包括:
8.一种计算机程序,其特征在于,所述计算机程序被执行时实现如权利要求1至6任一项所述的集装箱锁孔识别定位方法的步骤。
技术总结本发明公开了一种集装箱锁孔识别定位方法、系统及计算机程序,所述方法包括:构建样本数据集;构建包括特征提取网络、全局自注意力编码网络和分类预测网络的目标识别模型并进行训练,获得集装箱锁孔识别模型;获取待检测区域的图像数据;将待检测区域的图像数据输入集装箱锁孔识别模型,获得集装箱锁孔类别和位置区域检测结果。本发明提供的技术方案,通过构建包括特征提取网络、全局自注意力编码网络和分类预测网络的目标识别模型,对集装箱锁孔进行识别定位;提取锁孔图像,利用最大类间方差法,对图像进行二值化处理,查找与绘制锁孔轮廓,获得集装箱锁孔精确定位结果;能提高集装箱锁孔识别和定位的精度,提高抓箱的准确度和作业效率。技术研发人员:吴纪林,顾萱欧,金健,许力,陆拥军,陈微波,郑重,黄华,周皓,黄宇超,胡群,朱佳豪,陈朝辉,陈豪,田晓峰受保护的技术使用者:上海国际港务(集团)股份有限公司技术研发日:技术公布日:2024/12/2本文地址:https://www.jishuxx.com/zhuanli/20241204/343105.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表