一种立式混合机桨叶自动清理系统的制作方法
- 国知局
- 2024-12-06 13:11:50
本发明涉及混合机,特别涉及一种立式混合机桨叶自动清理系统。
背景技术:
1、立式混合机主要是将各种化工原材料混合均匀,最终合成所需的化工产品。由于化工原料在混合过程中伴随着相应的化学反应,处于较不稳定状态,所以其搅拌过程具有一定的危险性,在桨叶搅拌过程中不允许人员进入生产作业车间。
2、现有的立式混合机包括混合锅和搅拌桨叶,搅拌桨叶能够相对于混合锅旋转以对所述混合锅内的物料进行搅拌。由于工艺要求在搅拌过程中需要中途添加原材料,并需要对混合机桨叶表面粘附或堆积的物料进行清理,因此,目前该过程需要人员进入混料车间对桨叶上附着的物料进行人工手动清理,存在安全隐患,降低了设备使用的安全性。
技术实现思路
1、鉴于此,本发明提供一种立式混合机桨叶自动清理系统。
2、具体而言,包括以下的技术方案:
3、第一方面,提供了一种立式混合机桨叶自动清理系统,包括:
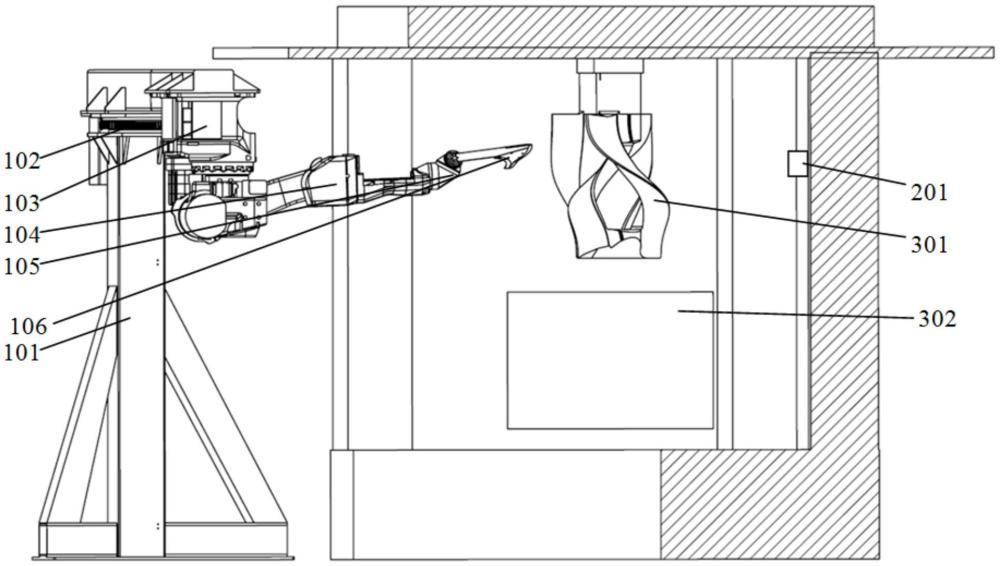
4、清理机器人和位姿识别装置,所述清理机器人位于混合机的一侧,所述位姿识别装置位于所述混合机的另一侧;
5、所述清理机器人和所述位姿识别装置分别与控制装置通信连接;
6、所述位姿识别装置用于获取桨叶实际位姿信息,并反馈至所述控制装置;
7、所述控制装置中设有桨叶三维模型,所述控制装置用于根据所述桨叶实际位姿信息,将桨叶三维模型从基础位置调整至与所述桨叶实际位姿信息对应的实际位置,并根据实际位置处的桨叶三维模型在线规划清理轨迹;
8、所述清理机器人用于根据所述清理轨迹对桨叶进行清理。
9、优选的,所述位姿识别装置为结构光3d扫描器。
10、优选的,所述清理机器人包括基座、转向结构、六轴机械臂和刮板;
11、所述基座设置在所述混合机的一侧,所述转向结构设置在所述基座的端部,所述六轴机械臂的一端和所述转向结构连接,所述六轴机械臂的另一端和所述刮板连接,所述转向结构用于带动所述六轴机械臂绕所述基座的竖直轴线周向转动。
12、优选的,所述转向结构包括驱动电机、转盘和悬臂梁;
13、所述转盘的一侧和所述基座连接,所述转盘的另一侧和所述悬臂梁的第一端连接,所述六轴机械臂和所述悬臂梁的第二端连接;
14、所述驱动电机和所述转盘连接,所述驱动电机用于驱动所述转盘转动。
15、优选的,所述刮板包括主板和主板套,所述主板套套设在所述主板上;
16、所述主板套上设有多种清理结构,多种所述清理结构用于对桨叶的不同形状的待清理面进行清理。
17、优选的,所述控制装置包括模拟模块、第一匹配模块和第一计算模块;
18、所述模拟模块用于根据所述桨叶三维模型和预设桨叶运行参数,模拟获得桨叶三维数模信息数据集;
19、所述第一匹配模块用于将所述桨叶实际位姿信息在所述桨叶三维数模信息数据集中进行匹配,获得与桨叶实际位姿信息匹配的桨叶三维数模信息;
20、所述第一计算模块用于根据与桨叶实际位姿信息匹配的桨叶三维数模信息,计算获得桨叶三维模型从基础位置调整至实际位置的最佳偏转量和平移量。
21、优选的,所述位姿识别装置还用于获取桨叶基础位姿信息,并反馈至所述控制装置;
22、所述控制装置还包括第二匹配模块、第二计算模块和纠偏模块;
23、所述第二匹配模块用于将所述桨叶实际位姿信息和所述桨叶基础位姿信息进行点云配准;
24、第二计算模块用于计算桨叶三维模型自基础位置调整至实际位置的预测偏转量和预测平移量;
25、纠偏模块用于基于预先设置的桨叶传动轴轴心运动轨迹,根据所述预测偏转量和所述预测平移量,对调整至实际位置的桨叶三维模型的位姿进行纠偏。
26、优选的,所述立式混合机桨叶自动清理系统还包括温度检测件;
27、所述温度检测件与所述控制装置通讯连接,所述温度检测件用于检测桨叶待清理面的温度。
28、优选的,所述立式混合机桨叶自动清理系统还包括报警器;
29、所述报警器和所述控制装置通讯连接,所述控制装置用于根据所述温度检测件反馈的温度数据控制所述报警器的开启或关闭。
30、优选的,所述立式混合机桨叶自动清理系统还包括影像获取装置和显示器,所述影像获取装置和显示器通信连接,所述影像获取装置用于获取所述混合机和所述清理机器人的影像数据并提供给所述显示器进行显示。
31、本发明提供的技术方案的有益效果至少包括:
32、本发明通过位姿识别装置识别待清理的桨叶实际位姿,并根据桨叶的实际位姿将桨叶三维模型从基础位置调整至实际位置,并根据实际位置处的桨叶三维模型在线规划清理轨迹,利用清理机器人根据清理轨迹对桨叶进行清理。桨叶清理的过程中无需人员进入混料车间对桨叶上附着的物料进行人工手动清理,提高了人员安全和设备使用的安全性。
技术特征:1.一种立式混合机桨叶自动清理系统,其特征在于,包括:
2.根据权利要求1所述的一种立式混合机桨叶自动清理系统,其特征在于,
3.根据权利要求1所述的一种立式混合机桨叶自动清理系统,其特征在于,
4.根据权利要求3所述的一种立式混合机桨叶自动清理系统,其特征在于,
5.根据权利要求3所述的一种立式混合机桨叶自动清理系统,其特征在于,
6.根据权利要求1所述的一种立式混合机桨叶自动清理系统,其特征在于,
7.根据权利要求1所述的一种立式混合机桨叶自动清理系统,其特征在于,
8.根据权利要求1所述的一种立式混合机桨叶自动清理系统,其特征在于,
9.根据权利要求8所述的一种立式混合机桨叶自动清理系统,其特征在于,
10.根据权利要求1所述的一种立式混合机桨叶自动清理系统,其特征在于,
技术总结本发明涉及混合机技术领域。本发明公开了一种立式混合机桨叶自动清理系统,包括:清理机器人和位姿识别装置,清理机器人位于混合机的一侧,位姿识别装置位于混合机的另一侧;清理机器人和位姿识别装置分别与控制装置通信连接;位姿识别装置用于获取桨叶实际位姿信息,并反馈至控制装置;控制装置中设有桨叶三维模型,控制装置用于根据桨叶实际位姿信息,将桨叶三维模型从基础位置调整至与桨叶实际位姿信息对应的实际位置,并根据实际位置处的桨叶三维模型在线规划清理轨迹;清理机器人用于根据清理轨迹对桨叶进行清理。本发明桨叶清理过程中无需人员进入混料车间对桨叶上附着的物料进行人工手动清理,提高了人员安全和设备使用的安全性。技术研发人员:周宣赤,曾庆林,高维金,刘嵩,朱凤朝,曹宇,乔辉,郑逸文受保护的技术使用者:中国航天空气动力技术研究院技术研发日:技术公布日:2024/12/2本文地址:https://www.jishuxx.com/zhuanli/20241204/343430.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表