一种星球车定向天线自主指向精度测试方法与流程
- 国知局
- 2024-12-26 16:47:46
本发明涉及一种星球车定向天线自主指向精度测试方法,属于航天测量。
背景技术:
1、一般而言,定向天线指向精度测量分为静态测量和动态测量两类,分别代表定向天线指向静态目标和指向动态目标。本体静止且指向静态目标、本体静止且指向动态目标的精度测试难度相对较低。由于航天器轨道半径大、姿态变化小,航天器载定向天线同样可按照本体静止、指向静态/动态目标的形式进行指向精度测试。
2、当前在轨运行的星球车也均采用车体静止、天线跟踪的形式实现数据传输,测控通信效率低,无法完成“动中通”,难以有效发挥移动探测潜力。但随着航天器技术的发展,尤其是星球车在轨应用的发展,“动中通”成为一种对空间机器人在轨操作的迫切需求。“动中通”过程中,跟踪目标为对地指向/对中继星/对着陆器等中转链路,星球车位移相比较中继轨道半径为小量,可以忽略;但星球车本体处于移动过程中,姿态(航向角、俯仰角和滚转角)快速变化,因此高精度测量星球车移动状态(主要是姿态变化)下的定向天线指向精度成为迫切需求。
3、目前在现有技术中尚没有星球车移动状态下的定向天线指向精度测量方法。因此汇总上述情况,目前关于定向天线指向精度测试存在星球车移动状态(主要是姿态变化)下测试所需范围大、所耗资源多、定量评估难度大的问题。
技术实现思路
1、本发明解决的技术问题是:克服现有技术的不足,提供了一种星球车定向天线自主指向精度测试方法,解决星球车移动过程指向精度精确测量的难题。
2、本发明的技术解决方案是:一种星球车定向天线自主指向精度测试方法,包括:
3、根据在轨中继轨道设计中继通信测试轨道;
4、在星球车定向天线波束口安装激光发射装置,其激光对外照射方向与定向天线波束中心重合,且在星球车运动过程中,激光发射装置连接可靠,不发生晃动、滑移和磕碰;
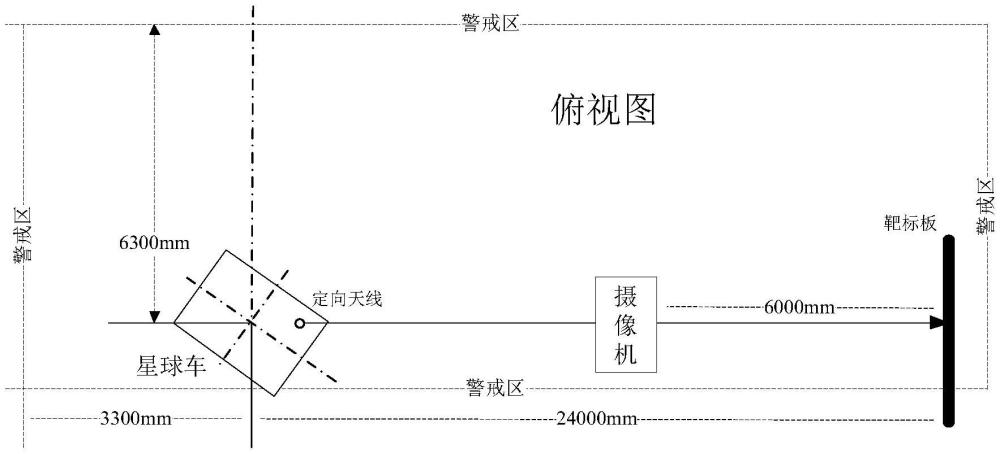
5、根据测试场地范围设计靶标板;
6、标定定向天线误差,消除定向天线安装精度、激光发射装置安装精度的误差影响;
7、激光发射装置保持开启状态,星球车起吊,对星球车按照所述中继通信测试轨道运动并按预设工况进行摆转,记录测试过程中天线转动角度、靶标板上光斑的位置,获得在不同姿态、不同速度下的指向精度,完成星球车动态定向天线指向精度测试。
8、进一步地,所述中继通信测试轨道的半长轴不小于10000km、偏心率不超过0.8,中继通信卫星轨道位置为所述中继通信测试轨道远月点,方位角变化不小于30min变化1°;中继通信测试轨道倾角和升交点赤经所述中继通信测试轨道远月点,测试时间内中继轨道高度角符合在轨使用状态;中继通信测试轨道近月点幅角为所述中继通信测试轨道远月点时,在测试场地坐标系下90°±5°,用于垂直靶标粘贴墙体。
9、进一步地,所述激光发射装置适应测试场地光照环境,有效照射距离大于30m;在30m照射距离下,激光点状光斑直径不大于1厘米;激光发射装置连续工作时间不低于1小时。
10、进一步地,所述根据测试场地范围设计靶标板包括:同时考虑水平距离和垂直距离,以星球车测试位置和靶标目标指向为基准,以波束角为约束,通过均匀离散的形式进行分档位设置。
11、进一步地,所述靶标板设有底纹,并以确定精度的网格作为底纹背景;所述靶标板竖直安装。
12、进一步地,所述标定定向天线误差包括:
13、将星球车停放于指定位置和指定高度,该高度作为基准值,应用于后续动态测量;
14、测量星球车的位置和姿态,采用靶标板中心p0的三维坐标;利用二者间的关系,求解定向天线机构运动角度θ0;
15、将定向天线运动至θ0角度,并打开激光发射装置,测量靶标板上激光光斑位置的三维坐标p1;
16、计算系统误差导致激光光斑的偏移距离p1-p0,将该偏移量转换至定向天线移动运动零位中进行补偿,使得初始状态下激光光斑中心位于靶标板中心处。
17、进一步地,对星球车按照预设工况进行定速摆转。
18、进一步地,所述预设工况包括:
19、星球车俯仰转动,按照从低速到高速转动,转动范围覆盖在轨使用范围;
20、星球车偏航转动,按照从低速到高速转动,转动范围覆盖360°;
21、星球车侧倾转动,按照从低速到高速转动,转动范围覆盖在轨使用范围;
22、星球车三轴复合转动,按照从低速到高速转动,转动范围覆盖在轨使用范围。
23、进一步地,所述星球车起吊的悬挂高度与标定测试高度相同。
24、进一步地,所述记录测试过程中天线转动角度的方法为使用帧频超过10hz的摄像机进行拍摄记录。
25、本发明与现有技术相比的优点在于:
26、通过专用中继通信测试轨道设计和靶标板设计,解决了目标点运动范围大、难以准确测量的难题;通过星球车静态精测,解决了初始系统误差测量和消除的难题;通过星球车质心起吊、定速摆转的方式,解决了常规移动测试对场地需求大、资源消耗多、定量评估困难的难题,确保能够高精度开展星球车移动状态下的定向天线自主指向精度测试。
技术特征:1.一种星球车定向天线自主指向精度测试方法,其特征在于,包括:
2.根据权利要求1所述的一种星球车定向天线自主指向精度测试方法,其特征在于,所述中继通信测试轨道的半长轴不小于10000km、偏心率不超过0.8,中继通信卫星轨道位置为所述中继通信测试轨道远月点,方位角变化不小于30min变化1°;中继通信测试轨道倾角和升交点赤经所述中继通信测试轨道远月点,测试时间内中继轨道高度角符合在轨使用状态;中继通信测试轨道近月点幅角为所述中继通信测试轨道远月点时,在测试场地坐标系下90°±5°,用于垂直靶标粘贴墙体。
3.根据权利要求1所述的一种星球车定向天线自主指向精度测试方法,其特征在于,所述激光发射装置适应测试场地光照环境,有效照射距离大于30m;在30m照射距离下,激光点状光斑直径不大于1厘米;激光发射装置连续工作时间不低于1小时。
4.根据权利要求1所述的一种星球车定向天线自主指向精度测试方法,其特征在于,所述根据测试场地范围设计靶标板包括:同时考虑水平距离和垂直距离,以星球车测试位置和靶标目标指向为基准,以波束角为约束,通过均匀离散的形式进行分档位设置。
5.根据权利要求4所述的一种星球车定向天线自主指向精度测试方法,其特征在于,所述靶标板设有底纹,并以确定精度的网格作为底纹背景;所述靶标板竖直安装。
6.根据权利要求1所述的一种星球车定向天线自主指向精度测试方法,其特征在于,所述标定定向天线误差包括:
7.根据权利要求1所述的一种星球车定向天线自主指向精度测试方法,其特征在于,对星球车按照预设工况进行定速摆转。
8.根据权利要求1所述的一种星球车定向天线自主指向精度测试方法,其特征在于,所述预设工况包括:
9.根据权利要求1所述的一种星球车定向天线自主指向精度测试方法,其特征在于,所述星球车起吊的悬挂高度与标定测试高度相同。
10.根据权利要求1所述的一种星球车定向天线自主指向精度测试方法,其特征在于,所述记录测试过程中天线转动角度的方法为使用帧频超过10hz的摄像机进行拍摄记录。
技术总结一种星球车定向天线自主指向精度测试方法,属于航天测量技术领域,包括:根据在轨中继轨道设计中继通信测试轨道;在星球车定向天线波束口安装激光发射装置,其激光对外照射方向与定向天线波束中心重合,且在星球车运动过程中;根据测试场地范围设计靶标板;标定定向天线误差,消除误差影响;激光发射装置保持开启状态,星球车起吊,对星球车按照所述中继通信测试轨道运动并按预设工况进行摆转,记录测试过程中天线转动角度、靶标板上光斑的位置,获得在不同姿态、不同速度下的指向精度,完成星球车动态定向天线指向精度测试。本发明通过专用中继通信测试轨道设计和靶标板设计,解决了目标点运动范围大、难以准确测量的难题。技术研发人员:辛鹏飞,田鹤,陈百超,袁宝峰,余后满,饶炜,党兆龙,宋文韬,张建利受保护的技术使用者:北京空间飞行器总体设计部技术研发日:技术公布日:2024/12/12本文地址:https://www.jishuxx.com/zhuanli/20241216/351436.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表