清洁机器人的制作方法
- 国知局
- 2024-12-26 15:22:04
本申请涉及光伏面板清洁,具体涉及一种清洁机器人。
背景技术:
1、光伏面板利用半导体材料在光照条件下发生伏特效应,从而将太阳能直接转换为电能。光伏面板安装在户外,因而面板的表面易堆积灰尘或其他附着物,导致光伏面板的发电效率降低。通常光伏面板的表面需要定期清洁,为降低人工清洁成本,提高清洁效率,光伏电站多采用清洁机器人清洁面板表面。
2、为保证发电效率,光伏面板多相对于水平面倾斜一角度,现有技术中的清洁机器人多应用于水平设置的表面,因而将其应用于倾斜设置的光伏表面时存在诸多困难。
3、清洁机器人包括控制器、电池包、清洁装置以及管路装置,当清洁机器人的车体在光伏面板的表面行进时,管路装置能够将水喷洒至光伏面板的表面,并且清洁装置可以清扫面板表面的灰尘和附着物。
4、电池包与控制器通过导线电连通至多个部件,在清洁过程中管路装置连接处存在渗水或者作业中突然遇到下雨时,会导致机器人存在损毁风险。若车体的顶部以及侧壁设计为一完整的外壳,虽然可以解决防水问题,但是机器人的电池被外壳覆盖,每次拆卸电池包时需要将外壳整体拆下,使得操作流程复杂,用户体验较差。
技术实现思路
1、本申请提供一种清洁机器人,以解决现有的机器人无法兼顾防水与拆卸电池单元,导致操作流程复杂,用户体验较差的技术问题。
2、本申请提供一种清洁机器人,其包括车体、第一盖体、第二盖体、控制器、电池单元以及旋转接头,车体包括由底盘与车体侧壁围成的空间,该空间被隔板分为第一空腔以及第二空腔;第一盖体连接至所述车体,并能够覆盖所述第一空腔;第二盖体可开合式铰接至所述车体,并能够覆盖所述第二空腔;控制器设于所述第一空腔内,并连接至所述车体;电池单元设于所述第二空腔内,并电连接至所述控制器;旋转接头连接至所述第一盖体,该旋转接头包括进水口以及出水口。
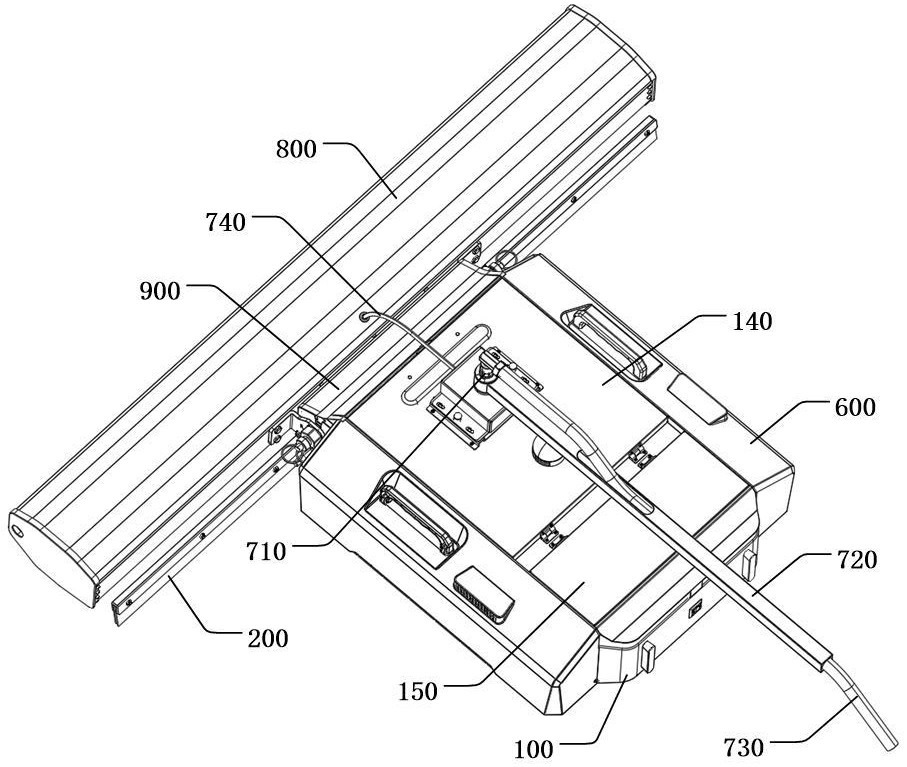
3、可选的,清洁机器人还包括清洁壳体、第一清洁管、第二清洁管、至少一个喷嘴以及密封盖,清洁壳体可转动式连接至所述车体的前侧,定义所述车体的前进方向为前方;第一清洁管的一端连通至所述旋转接头的出水口,其另一端穿设至所述清洁壳体内;第二清洁管连接至所述清洁壳体的内壁,并连通至所述第一清洁管;所述第二清洁管的中心轴与所述清洁壳体的中心轴相平行;至少一个喷嘴连通至所述第二清洁管;密封盖罩设至所述车体的前侧,并位于所述第一清洁管的下方。
4、可选的,清洁机器人还包括两组行走装置以及两个防护壳体,两组行走装置分别连接至所述车体的两侧;两个防护壳体分别连接至所述车体的两侧,每一所述防护壳体罩设至所述行走装置的外部。
5、可选的,每一所述行走装置包括第一车轮、第二车轮、履带以及行走电机,第一车轮可转动式连接至所述车体侧壁的前端;第二车轮可转动式连接至所述车体侧壁的后端;履带为一环形,并环绕至所述第一车轮与所述第二车轮的外侧,所述履带的外表面开设有两个以上凹槽,所述凹槽沿所述履带的宽度方向贯穿式开设;行走电机连接至所述车体,并电连接至所述控制器,所述行走电机的旋转轴与所述第一车轮连接。
6、可选的,每一所述行走装置还包括压紧机构,所述压紧机构包括安装架、两个以上伸缩杆以及两个以上压紧轮,安装架连接至所述车体侧壁,并位于所述履带所围的空间内;两个以上伸缩杆沿所述履带的前进方向排布,每一所述伸缩杆沿竖直方向穿设至所述安装架内,且其顶端连接至所述安装架;每一所述压紧轮可转动式连接至所述伸缩杆的底端,且所述压紧轮的中心轴线垂直于所述履带的前进方向;当所述履带行进时,至少一个所述压紧轮被所述伸缩杆压设至所述履带的内表面。
7、可选的,每一所述行走装置还包括防松机构,所述防松机构包括固定座、联动臂以及防松轮,固定座连接至所述防护壳体,并设于所述履带的上方;联动臂的一端通过弹性件可转动式连接至所述固定座,其另一端朝向所述履带倾斜延伸;防松轮可转动式连接至所述联动臂的端部,并能够压设至所述履带的外表面。
8、可选的,清洁机器人还包括套管以及进水管,套管为一套管,所述套管的一端可转动式连接至所述旋转接头;进水管的一端连通至所述旋转接头,其另一端可拆卸式连通至外部的供水系统;其中,所述套管的侧壁沿其轴向开设有一横槽,所述进水管穿过所述横槽,并插入所述套管内。
9、可选的,所述旋转接头至所述车体侧边的垂直距离小于所述套管的长度。
10、可选的,清洁机器人还包括清洁壳体以及清洁刷,清洁壳体可转动式连接至所述车体的一侧;清洁刷可转动式连接至所述清洁壳体内;其中,所述清洁刷的长度适配于至少一个光伏面板的宽度。
11、可选的,清洁机器人还包括刮水板,刮水板连接至所述车体的一侧,所述刮水板的底端能够贴合至被清洁表面。
12、本申请提供一种清洁机器人,第一盖体的上方设置有旋转接头,上述旋转接头包括进水口以及出水口,利用第一盖体可以隔离控制器与旋转接头,从而可以避免旋转接头渗出的水流动至第一空腔。由于第二空腔内的电池单元需要更换,因此第二盖体需要打开、关闭,因此将旋转接头设于第一盖体上,既避免旋转接头影响第二盖体的关闭,同时也能够防止旋转接头渗出的水流动至第二空腔内,以保证旋转接头与控制器、电池单元之间的隔离效果。
技术特征:1.一种清洁机器人,其特征在于,包括:
2.根据权利要求1所述的清洁机器人,其特征在于,还包括:
3.根据权利要求1所述的清洁机器人,其特征在于,还包括:
4.根据权利要求3所述的清洁机器人,其特征在于,每一所述行走装置包括:
5.根据权利要求4所述的清洁机器人,其特征在于,每一所述行走装置还包括压紧机构,所述压紧机构包括:
6.根据权利要求4所述的清洁机器人,其特征在于,每一所述行走装置还包括防松机构,所述防松机构包括:
7.根据权利要求1所述的清洁机器人,其特征在于,还包括:
8.根据权利要求7所述的清洁机器人,其特征在于,
9.根据权利要求1所述的清洁机器人,其特征在于,还包括:
10.根据权利要求1所述的清洁机器人,其特征在于,还包括:
技术总结本申请提供一种清洁机器人,其包括车体、第一盖体、第二盖体、控制器、电池单元以及旋转接头,车体包括由底盘与车体侧壁围成的空间,该空间被隔板分为第一空腔以及第二空腔;第一盖体连接至所述车体,并能够覆盖所述第一空腔;第二盖体可开合式铰接至所述车体,并能够覆盖所述第二空腔;控制器设于所述第一空腔内,并连接至所述车体;电池单元设于所述第二空腔内,并电连接至所述控制器;旋转接头连接至所述第一盖体,该旋转接头包括进水口以及出水口,以解决现有的机器人无法兼顾防水与拆卸电池单元,导致操作流程复杂,用户体验较差的技术问题。技术研发人员:徐斐,邓龙受保护的技术使用者:苏州瑞得恩光能科技有限公司技术研发日:20231222技术公布日:2024/12/23本文地址:https://www.jishuxx.com/zhuanli/20241226/345473.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表