清洁机器人的底盘结构及清洁机器人的制作方法
- 国知局
- 2024-12-06 13:05:24
本发明涉及地面清洁设备,尤其涉及一种清洁机器人的底盘结构及清洁机器人。
背景技术:
1、清洁机器人是集吸尘与拖地功能于一体的地面清洁设备,因其灵活耐用而受到消费者的广泛使用。清洁机器人的底盘上通常装配有行走机构、吸尘机构和拖地机构,当行走机构能沿着地面行走时,吸尘机构即可对地面进行吸尘处理,拖地机构即可对地面进行拖地处理。但现有的行走机构、吸尘机构及拖地机构设计不合理,整体的占用空间较大,不利于清洁机器人底盘结构的优化,现有的吸尘机构及拖地机构难以自适应地面的高低不平,导致复杂路面的清洁效果较差。
技术实现思路
1、为克服上述缺点,本发明的目的在于提供一种清洁机器人的底盘结构及清洁机器人,结构更加紧凑,且能适应复杂路面的清洁动作,提升对复杂路面的清洁效果。
2、为了达到以上目的,本发明采用的技术方案之一是:一种清洁机器人的底盘结构,包括:
3、底板;
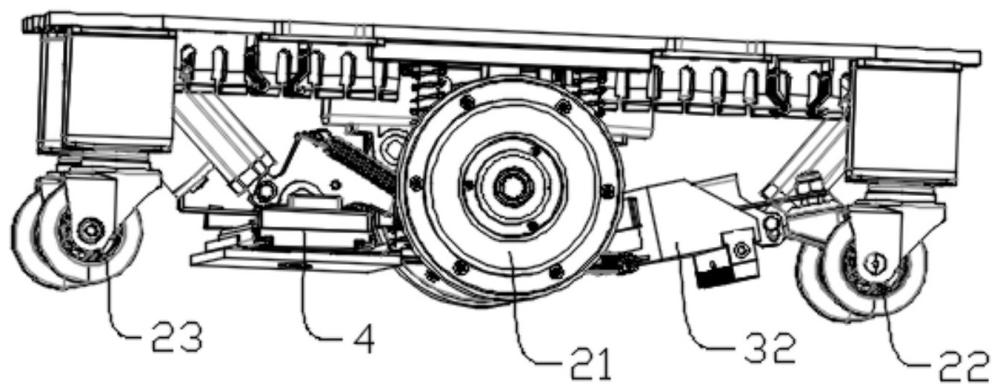
4、行走机构,安装在所述底板的下端,其包括驱动轮组及位于所述驱动轮组两侧的第一万向轮组、第二万向轮组;
5、吸尘机构,包括位于所述第一万向轮组与驱动轮组之间的吸尘组件,吸尘组件包括在第一驱动件作用下升降移动的吸尘头,所述吸尘头与所述第一驱动件浮动连接;
6、拖地机构,位于所述第二万向轮组与驱动轮组之间,其包括第二驱动件、拖地摆臂、拖地部,所述拖地摆臂的一端枢接在所述底板上,另一端与所述第二驱动件浮动连接;所述拖地部的上端中部枢接在所述拖地摆臂上,下端用以接触地面;所述第二驱动件用以驱动所述拖地摆臂摆动,以使所述拖地部升降移动。
7、本发明清洁机器人的底盘结构的有益效果在于:
8、1、首先在行走机构中,通过驱动轮组及第一万向轮组、第二万向轮组的多轮组设置能增强清洁机器人行走的稳定性;然后将吸尘组件布设在第一万向轮组、驱动轮组之间,并将拖地机构布设在第二万向轮组、驱动轮组之间,能有效利用各轮组之间本身就存在的空间来安装吸尘组件及拖地机构,以实现空间的合理布局,达到底盘结构更加紧凑的目的;
9、2、在吸尘机构中,通过第一驱动件对吸尘头的升降驱动,使得吸尘头能在工作时下降至接触地面,而在非工作时能上升至离开地面,以减少吸尘头非工作时与地面的接触,提高吸尘头的使用寿命;而通过吸尘头与第一驱动件的浮动连接使得吸尘头在接触地面时能具备相对于第一驱动件上下浮动的功能,进而适应地面的高低不平;
10、3、在拖地机构中,通过第二驱动件对拖地摆臂摆动的驱动,使得枢接在拖地摆臂上的拖地部能在拖地摆臂摆动的过程中实现升降的功能,进而使拖地部能在工作时下降至接触地面,而在非工作时能上升至离开地面,以保证拖地部在非工作时的通风性,利于拖地部下端的干燥性;而通过拖地摆臂与第二驱动件的浮动连接使得拖地摆臂能具备相对于第二驱动件上下浮动的功能,进而使得枢接在拖地摆臂上的拖地部也能具备上下浮动的功能,以适应地面的高低不平;且通过将拖地部的上端中部枢接在拖地摆臂上,使得拖地部能随着地面的坡度变化进行自适应的摆动,以更好地接触不平整的复杂路面,进而提升对复杂路面的清洁效果。
11、进一步来说,所述拖地机构还包括第二弹性件,所述第二弹性件沿斜向布设,其高端连接在所述拖地摆臂上,其低端通过连接架连接在所述底板上;所述第二弹性件始终处于拉伸状态,以对所述拖地摆臂施加下斜方向的拉力。
12、当清洁机器人在行走时,因拖地部与地面的接触,拖地部会受到地面的摩擦阻力,此时,通过第二弹性件对拖地摆臂的斜向拉力,能对拖地摆臂及拖地部形成行走方向上的拉力,进而抵消地面对拖地部的摩擦阻力,使得拖地摆臂及拖地部能随清洁机器人同步行走;同时,因第二弹性件是斜向布设的,第二弹性件还能对拖地摆臂及拖地部形成向下的力,以使拖地部能对地面形成向下的力,以模拟人手施压在拖地部上的状态,增强拖地的清洁效果。
13、此外,将第二弹性件连接在拖地摆臂上而非直接连接在拖地部上,是因为通过拖地摆臂既能将第二弹性件的拉力传递给拖地部,又能避免在拖地部随地面坡度变化摆动时受到第二弹性件的影响,保证拖地部的自由摆动。
14、进一步来说,所述拖地摆臂靠近所述第二驱动件的一端开设有第二腰型孔,所述第二驱动件沿斜向设置,其高端枢接在底板上,低端连接有能沿水平方向穿设在所述第二腰型孔内的第二销轴;所述第二销轴能沿所述第二腰型孔移动。通过第二驱动件的斜向设置使得第二驱动件在驱动拖地摆臂摆动时,拖地部形成斜向升降路径,这样设置能充分利用第二万向轮组与驱动轮组之间的横向空间,以尽可能地节省所需占用的竖向空间,进而在有限空间内保证拖地部的升降移动到位。通过第二销轴与第二腰型孔的配合既能将第二驱动件的驱动力传递给拖地摆臂,又能在拖地摆臂受到拖地部的挤压时能相对于第二驱动件进行浮动。
15、进一步来说,当所述拖地部接触到地面时,所述第二腰型孔的长度方向为竖直方向,且所述第二销轴与第二腰型孔长度方向上的两端之间均留有间隙。
16、进一步来说,所述拖地机构还包括校平部,所述校平部固接在所述底板的下端并位于所述拖地部的上方,所述校平部的下端设有供所述拖地部抵接的校平面。
17、通过校平部的设置既能对拖地部的上升位置进行限定,又能抑制拖地部在最高位时的左右摆动,以避免因拖地部在非工作状态下的摆动而导致的清洁机器人无法正常行走;且校平面对拖地部的校平能使拖地部下降至接触地面时保持在水平面上,利于拖地部与地面的充分接触。
18、进一步来说,所述吸尘头上连接有用以接触地面的导向轮组,导向轮组位于吸尘头沿行走机构行走方向的前侧。由于吸尘头与地面接触的一端通常为毛刷,而毛刷的刚性较差,若地面突然变高时,吸尘头并不会直接向上浮动,而是会因地面对毛刷的挤压,导致毛刷变形弯曲,此时,通过导向轮组的设置能先于吸尘头感知到地面的高度变化,进而能通过地面对导向轮组的顶升,使得吸尘头能相对于第一驱动件的向上浮动,以避免毛刷被地面挤压变形,进而提高毛刷的使用寿命。而当地面变低时,导向轮组则能在自重作用下带动吸尘头向下浮动,以使毛刷重新接触到地面。
19、进一步来说,所述吸尘头包括吸尘口朝下的吸尘头本体,所述吸尘头本体的一端设有与所述底板枢接的吸尘头摆臂,另一端设有与所述第一驱动件浮动连接的吸尘头连接板;所述第一驱动件斜向设置,其高端枢接在所述底板上,其低端与所述吸尘头连接板浮动连接。
20、通过吸尘头摆臂、吸尘头本体及吸尘头连接板的设置使得吸尘头能在第一驱动件的驱动下形成斜向的升降路径,这样设置能充分利用第一万向轮组与驱动轮组之间的横向空间,以尽可能地节省所需占用的竖向空间,进而在有限空间内保证吸尘头的升降移动到位。
21、进一步来说,所述吸尘组件还包括斜向布设的第一弹性件,所述第一弹性件位于所述吸尘头远离所述第一驱动件的一侧,且所述第一弹性件的低端通过连接架连接在所述底板上,高端连接在所述吸尘头本体上,所述第一弹性件始终处于拉伸状态。
22、因吸尘头上连接有导向轮组,通过第一弹性件对吸尘头本体的斜向拉伸,能对吸尘头本体形成向下的力,进而能带动导向轮组能始终接触地面。
23、进一步来说,所述驱动轮组包括对称设置的两个驱动轮部,每个所述驱动轮部均包括内置轮毂电机的驱动轮,所述驱动轮通过弹性悬臂安装在所述底板上。通过内置轮毂电机的驱动轮既保证了驱动轮部的独立驱动,又能节省两个驱动轮部的安装空间,以尽可能地预留足够的空间来安装吸尘机构和拖地机构,同时通过弹性悬臂的设置能实现驱动轮的上下浮动,以适应地面的高低不平。
24、本发明采用的技术方案之二是:一种清洁机器人,包括上述任一所述的底盘结构。本发明的清洁机器人结构更加紧凑,并能适应复杂路面的清洁动作,提升对复杂路面的清洁效果。
本文地址:https://www.jishuxx.com/zhuanli/20241204/343202.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。