一种无人船对接固定装置、无人船及水体清洁方法
- 国知局
- 2024-12-06 12:53:47
本发明属于环保清洁领域,涉及水处理领域,具体涉及一种无人船对接固定装置、无人船及水体清洁方法。
背景技术:
1、随着我国对水资源保护意识的不断提升,针对水域生态系统的维护处理工作正面临着一些技术上的挑战。传统方法如人工巡检成本高、效率低,难以实时监控广阔水域。而对于水华等紧急情况的水体应急处理方面,目前主要还是采用人工打捞的方式,不但耗费人力,还会拖延响应时间,对水源和水生物造成极大破坏。即使使用大型打捞船,但由于水华暴发的不确定性,以及在时间和空间上的不均衡性,导致其利用效率不高,且大型打捞船难以灵活前往小型水域工作,导致对于水体处理的效果不佳。
2、因此,开发一套自主性高、协作能力强、作业范围广的水体处理系统,以替代人工执行水域生态系统的维护是十分必要。无人船技术的兴起,以其自主航行、远程控制和智能感知能力,为水域维护带来新机遇。然而,单一无人船作业能力有限,难以应对大规模任务。
3、现有技术中虽然也有无人船间的对接固定方案,但是其往往需要在码头等固定位置完成对无人船的连接固定。但这样的方案在实际使用和操作中灵活性较差,以清除水华为例,当需要对水中目标水域的水华进行定点处理时,若水面垃圾等污染物过多,如果在码头就对多个无人船完成固定并在无人船间设置拉网,当无人船行驶至特定区域时,无人船间本身已经存在大量污染物,对于水华的定点清除效果不佳。此外,在固定位置连接无人船的问题还在于,一旦某条船出现问题,整体的维修难度过大。
技术实现思路
1、鉴于以上所述的现有技术的缺点,本发明的目的是提供一种无人船对接固定装置、无人船及水体清洁方法,实现多个无人船在任意时刻、任意位置的对接固定。
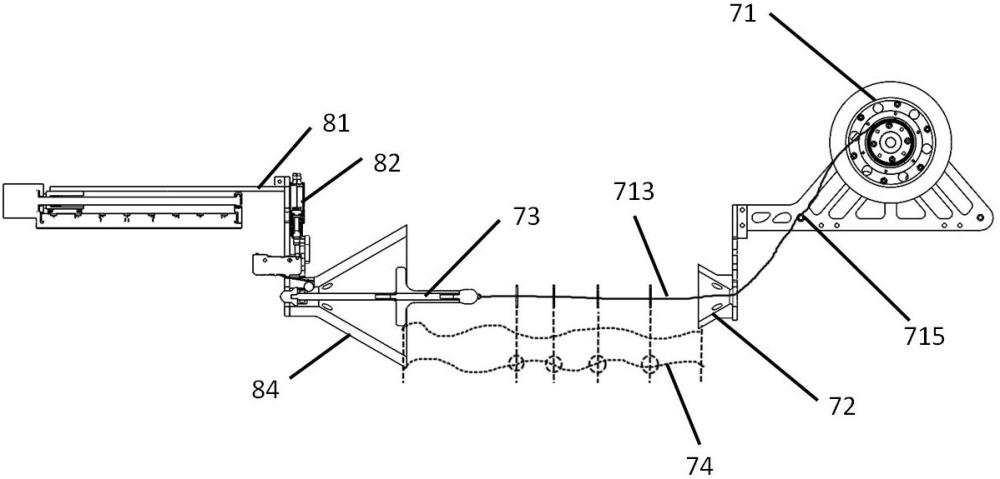
2、为实现上述目的,本发明采用如下技术方案:本发明第一方面,提供一种无人船对接固定装置,包括:从动对接单元,包括绳部,与所述绳部固定连接的定位套,通过所述定位套定位的对接棒,以及将所述绳部和所述对接棒连接的连接绳,所述绳部通过调节所述连接绳的长度引导对接棒进入所述定位套并通过收紧所述连接绳以定位所述对接棒;主动对接单元,包括基架,与基架滑动连接的滑台,固定连接于滑台的夹持部和控制夹持部开启的开关;所述开关在检测到所述滑台运动至可与所述对接棒固定的设定位置后,控制所述夹持部抓取所述对接棒。
3、作为本发明的一种实施方式,所述从动对接单元的对接棒包括第一端件,中间段的连杆和第二端件,所述第一端件设置在所述连杆靠近绳部的一端,所述第二端件设置在所述连杆远离所述绳部的一端,其中所述连杆上设置有凸起件,所述凸起件与所述第二端件间的连杆为抓取段,所述抓取段的长度大于所述夹持部在所述抓取段方向上的尺寸,所述凸起件和所述第二端件用于使所述夹持部抓取所述对接棒后在所述抓取段内移动。
4、作为本发明的一种实施方式,所述定位套为一个喇叭状结构,定位套靠近绳部的一端的开口尺寸小于定位套靠近对接棒一端的开口尺寸,且定位套靠近绳部一端的开口尺寸至少部分小于对接棒的第一端件的尺寸。
5、作为本发明的一种实施方式,所述凸起件与所述第一端件间的连杆为网动段,所述从动对接单元还包括网兜,所述网兜的一端固定设置在凸起件上,另一端固定设置在所述定位套上,所述网兜上设置有网环,多个网环套设在网动段上,所述网环的尺寸大于所述定位套靠近对接棒一端的开口尺寸,小于所述凸起件的尺寸。
6、作为本发明的一种实施方式,所述主动对接单元还包括驱动器,所述驱动器用于驱动滑台相对于所述基架沿所述对接棒的轴向运动,所述滑台与所述夹持部固定连接,所述滑台上设置有用于与所述对接棒匹配的匹配孔,所述匹配孔为所述设定位置。
7、作为本发明的一种实施方式,所述夹持部包括传动连接的推杆和夹爪,所述推杆固定设置在所述滑台上,并能够相对所述滑台上下运动以带动所述夹爪抓取或松离所述对接棒;和/或,所述开关为微动开关,所述微动开关固定设置在滑台上并与匹配孔在所述对接棒的轴向存在适当干涉。
8、作为本发明的一种实施方式,所述绳部通过pid算法调整所述连接绳的长度,所述主动对接单元还包括导向套,所述导向套固定设置在所述滑台靠近所述从动对接单元的一侧,所述导向套用于引导所述定位套运动至所述设定位置;和/或,所述绳部包括转动连接的拉绳转盘,拉绳架,拉绳电机和滑轮,所述拉绳架与所述定位套固定连接,所述拉绳转盘上绕设有多圈连接绳;所述拉绳电机相对固定设置在所述拉绳架上,所述拉绳电机的输出端与所述拉绳转盘连接;至少一个滑轮转动固定设置在拉绳架上,并设置在拉绳转盘和定位套间以提高使用寿命。
9、本发明的第二方面,提供一种无人船,包括船体,以及分别与所述船体固定的水下推进器,定位装置,控制系统和本发明第一方面所述的无人船对接固定装置,其中,所述控制系统与所述船体、水下推进器、定位装置和无人船对接固定装置连接,所述控制系统基于所述定位装置选择性地控制所述水下推进器带动所述船体移动至与其他无人船对接固定处。
10、作为本发明的一种实施方式,还包括固定在所述船体上的水样采集与检测装置,所述水样采集与检测装置用于测量水箱中的水体信息;和/或,还包括撒料器,所述撒料器包括下料漏斗、螺旋输送机、带叶片的转盘和转盘电机,螺旋输送机的一端与下料漏斗的底端连接,另一端与带叶片的转盘连接,所述螺旋输送机用于将物料输送至特定位置的同时搅碎物料。
11、本发明的第三方面,提供一种水体清洁方法,基于本发明第二方面所述的无人船,所述方法包括:基于目标水域信息调度多艘无人船;调整各无人船位置以基于所述无人船对接固定装置实现对所述多艘无人船的对接固定,所述无人船对接固定装置包括设于无人船间用于收集污染物的网兜;控制各无人船按预设航线航行以通过所述网兜实现对目标水域的清洁。
12、综上所述,与现有技术相比,本发明包括以下至少一种有益技术效果:
13、通过本发明的方案,能够很好的实现在目标水域完成无人船的连接松离,大大提高无人船连接程度的便携性和连接效率。即使特定无人船出现故障,也不影响其他无人船的连接固定,提高协同作业的工作效率;
14、此外,当需要对目标水域进行清洁处理时,能够通过本发明提供的无人船对接固定装置快速地实现相邻的无人船连接固定,并通过设置随连接绳长度变化而伸缩的网兜,利用网兜和水面的浮力,将水面漂浮物推至指定收集点进行后续处理。
技术特征:1.一种无人船对接固定装置,其特征在于,包括:
2.根据权利要求1所述的无人船对接固定装置,其特征在于,所述从动对接单元的对接棒包括第一端件,中间段的连杆和第二端件,所述第一端件设置在所述连杆靠近绳部的一端,所述第二端件设置在所述连杆远离所述绳部的一端,其中
3.根据权利要求2所述的无人船对接固定装置,其特征在于,所述定位套为一个喇叭状结构,定位套靠近绳部的一端的开口尺寸小于定位套靠近对接棒一端的开口尺寸,且定位套靠近绳部一端的开口尺寸至少部分小于对接棒的第一端件的尺寸。
4.根据权利要求2所述的无人船对接固定装置,其特征在于,所述凸起件与所述第一端件间的连杆为网动段,所述从动对接单元还包括网兜,所述网兜的一端固定设置在凸起件上,另一端固定设置在所述定位套上,所述网兜上设置有网环,多个网环套设在网动段上,所述网环的尺寸大于所述定位套靠近对接棒一端的开口尺寸,小于所述凸起件的尺寸。
5.根据权利要求1-4中任意一项所述的无人船对接固定装置,其特征在于,所述主动对接单元还包括驱动器,所述驱动器用于驱动滑台相对于所述基架沿所述对接棒的轴向运动,所述滑台与所述夹持部固定连接;
6.根据权利要求5所述的无人船对接固定装置,其特征在于,所述夹持部包括传动连接的推杆和夹爪,所述推杆固定设置在所述滑台上,并能够相对所述滑台上下运动以带动所述夹爪抓取或松离所述对接棒;
7.根据权利要求1-4中任意一项所述的无人船对接固定装置,其特征在于,所述绳部通过pid算法调整所述连接绳的长度,所述主动对接单元还包括导向套,所述导向套固定设置在所述滑台靠近所述从动对接单元的一侧,所述导向套用于引导所述定位套运动至所述设定位置;
8.一种无人船,其特征在于,包括船体,以及分别与所述船体固定的水下推进器,定位装置,控制系统和如权利要求1-7中任意一项所述的无人船对接固定装置,
9.根据权利要求8所述的无人船,其特征在于,还包括固定在所述船体上的水样采集与检测装置,所述水样采集与检测装置用于测量水箱中的水体信息;
10.一种水体清洁方法,基于权利要求8-9中任意一项所述的无人船,其特征在于,所述方法包括:
技术总结本发明属于环保清洁领域,涉及水处理领域,具体涉及一种无人船对接固定装置、无人船及水体清洁方法。无人船对接固定装置,包括从动对接单元,包括绳部,与所述绳部固定连接的定位套,通过所述定位套定位的对接棒,以及将所述绳部和所述对接棒连接的连接绳,所述绳部通过调节所述连接绳的长度引导对接棒进入所述定位套并通过收紧所述连接绳以定位所述对接棒;主动对接单元,包括基架,与基架滑动连接的滑台,固定连接于滑台的夹持部和控制夹持部开启的开关;所述开关在检测到所述滑台运动至可与所述对接棒固定的设定位置后,控制所述夹持部抓取所述对接棒。实现多个无人船在任意时刻、任意位置的对接固定。技术研发人员:汤奇荣,余睿志,余敏,吴祥菁,李宗效,孙语頔,徐梓康,时晓宇,李树涵受保护的技术使用者:同济大学技术研发日:技术公布日:2024/12/2本文地址:https://www.jishuxx.com/zhuanli/20241204/342959.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表