一种双向超越离合器及具有其的移动机器人的制作方法
- 国知局
- 2024-12-26 15:26:03
本申请涉及机械传动部件,具体涉及一种双向超越离合器及具有其的移动机器人。
背景技术:
1、超越离合器是机电一体化产品中的机械传动基础部件,主要用于原动机与工作机之间或机器内部主动轴与从动轴之间的动力传递与分离。它是利用主动从动部件的速度变化或者旋转方向的变化或某些部件的传动特性,实现自行离合功能的一种自控离合器。按照工作原理一般可将超越离合器分为楔块式超越离合器、滚珠式超越离合器和棘轮式超越离合器。但相关技术中的超越离合器大部分不能实现双向离合(也即主动轴顺时针旋转或逆时针旋转均可以带动从动轴旋转)的功能。另外,相关技术中的超越离合器不能实现从动轴空转的功能,也即当从动轴旋转时会反向带动主动轴旋转,在一些应用场景中会影响机电使用。
技术实现思路
1、本申请旨在一定程度上解决相关技术中的技术问题之一。为此,本申请提供了一种双向超越离合器及具有其的移动机器人。
2、为了达到上述目的,本申请采用如下技术方案:一种双向超越离合器,包括:
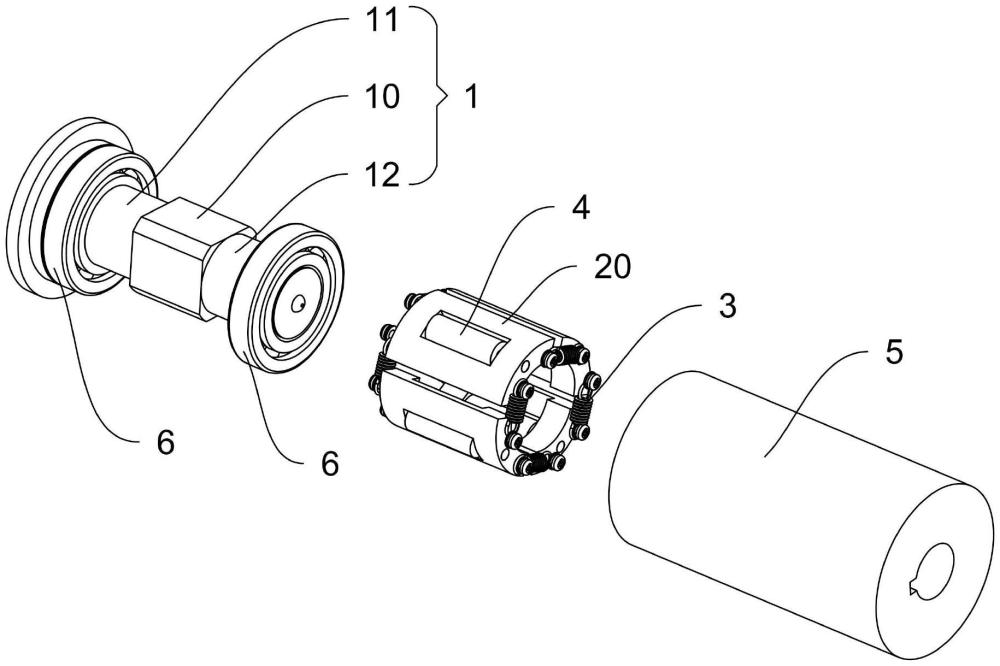
3、主动轴,其具有纵截面呈多边形的驱动段;
4、保持架,其包括多个围绕所述主动轴布置的安装块,所述安装块设置有沿主动轴的径向贯穿安装块的安装孔,相邻两个所述安装块之间通过弹性件相连,并且所述弹性件以使得相邻两个所述安装块具有相互靠近的趋势施压于安装块;
5、滚柱,其与所述主动轴同向并排布置且转动设置于所述安装孔内;以及,
6、从动轴,其具有内孔且套设于所述保持架外,所述内孔的内壁设置有多个用于与所述滚柱啮合的啮合槽,多个所述啮合槽沿内孔的周向均匀分布;
7、所述驱动段具有最大径向尺寸h和最小径向尺寸h,所述滚柱具有直径d,所述内孔具有最大内半径r和最小内半径r,其中,h+d>2r,h+d<2r。
8、应用本申请具有以下有益效果:通过在主动轴上设计出驱动段,驱动段的纵截面呈多边形,由此该驱动段可具有最大径向尺寸h和最小径向尺寸h,通过对驱动段、滚柱和从动轴的内孔三者之间的尺寸进行设计,使得h+d>2r,h+d<2r。由于h+d<2r,在主动轴未旋转时,滚柱与啮合槽相对分离,从动轴转动不能够反向带动主动轴旋转;而由于h+d>2r,在主动轴正转或反转时,都可以通过转动带动保持架旋转,可利用保持架在旋转时受到的离心力以及主动轴作用于保持架及滚柱的作用力使得滚柱啮合至啮合槽内,从而可带动从动轴旋转。
9、可选的,所述驱动段的纵截面为八边形,并且所述八边形具有交错布置的四条长边和四条短边,两条相对的所述短边之间的间距为最大径向尺寸h,两条相对的所述长边之间的间距为最小径向尺寸h。
10、可选的,所述安装块沿主动轴的轴向设置有贯穿的穿孔,所述穿孔内设置有转轴,所述滚柱通过转轴转动设置于安装孔内。
11、可选的,沿所述主动轴的轴向上,所述安装块的前端和后端均设置有所述弹性件。
12、可选的,所述弹性件为弹簧,所述安装块上设置有连接件,所述弹簧的两端分别固定连接至相邻两个所述安装块上的连接件。
13、可选的,所述啮合槽沿内孔的周向布满。
14、可选的,所述主动轴还包括分别位于所述驱动段两侧且与驱动段同轴的第一连接段和第二连接段,所述第一连接段和第二连接段的纵截面均为圆形,并且所述第一连接段和第二连接段的最大直径尺寸均不大于驱动段的最小径向尺寸h。
15、可选的,所述第一连接段和第二连接段外均设置有轴承,所述从动轴套设于所述轴承外。
16、可选的,所述保持架与从动轴之间设置有阻力结构,所述阻力结构用于在主动轴开始旋转的瞬间限制所述保持架跟随从动轴旋转。
17、可选的,所述阻力结构为设置于所述安装块的外表面与内孔的内壁之间的摩擦环,所述摩擦环固定设置于安装块的外表面或内孔的内壁。
18、此外,为解决上述技术问题,本申请还提供了一种移动机器人,包括移动底盘和用于驱动移动底盘移动的驱动电机,所述移动机器人还包括如上述技术方案中任一项所述的双向超越离合器,其中,所述主动轴与所述驱动电机的输出端连接,所述从动轴与所述移动底盘连接。
19、本申请的这些特点和优点将会在下面的具体实施方式以及附图中进行详细的揭露。本申请最佳的实施方式或手段将结合附图来详尽表现,但并非是对本申请技术方案的限制。另外,在每个下文和附图中出现的这些特征、要素和组件是具有多个,并且为了表示方便而标记了不同的符号或数字,但均表示相同或相似构造或功能的部件。
技术特征:1.一种双向超越离合器,其特征在于,包括:
2.如权利要求1所述的双向超越离合器,其特征在于,所述驱动段(10)的纵截面为八边形,并且所述八边形具有交错布置的四条长边和四条短边,两条相对的所述短边之间的间距为最大径向尺寸h,两条相对的所述长边之间的间距为最小径向尺寸h。
3.如权利要求1或2所述的双向超越离合器,其特征在于,所述安装块(20)沿主动轴(1)的轴向设置有贯穿的穿孔(201),所述穿孔(201)内设置有转轴(40),所述滚柱(4)通过转轴(40)转动设置于安装孔(200)内。
4.如权利要求1或2所述的双向超越离合器,其特征在于,沿所述主动轴(1)的轴向上,所述安装块(20)的前端和后端均设置有所述弹性件(3)。
5.如权利要求4所述的双向超越离合器,其特征在于,所述弹性件(3)为弹簧,所述安装块(20)上设置有连接件(202),所述弹簧的两端分别固定连接至相邻两个所述安装块(20)上的连接件(202)。
6.如权利要求1或2所述的双向超越离合器,其特征在于,所述啮合槽(50)沿内孔的周向布满。
7.如权利要求1或2所述的双向超越离合器,其特征在于,所述主动轴(1)还包括分别位于所述驱动段(10)两侧且与驱动段(10)同轴的第一连接段(11)和第二连接段(12),所述第一连接段(11)和第二连接段(12)的纵截面均为圆形,并且所述第一连接段(11)和第二连接段(12)的最大直径尺寸均不大于驱动段(10)的最小径向尺寸h。
8.如权利要求7所述的双向超越离合器,其特征在于,所述第一连接段(11)和第二连接段(12)外均设置有轴承(6),所述从动轴(5)套设于所述轴承(6)外。
9.如权利要求1或2所述的双向超越离合器,其特征在于,所述保持架(2)与从动轴(5)之间设置有阻力结构,所述阻力结构用于在主动轴(1)开始旋转的瞬间限制所述保持架(2)跟随从动轴(5)旋转。
10.如权利要求9所述的双向超越离合器,其特征在于,所述阻力结构为设置于所述安装块(20)的外表面与内孔的内壁之间的摩擦环,所述摩擦环固定设置于安装块(20)的外表面或内孔的内壁。
11.一种移动机器人,包括移动底盘和用于驱动移动底盘移动的驱动电机,其特征在于,所述移动机器人还包括如权利要求1至10中任一项所述的双向超越离合器,其中,所述主动轴(1)与所述驱动电机的输出端连接,所述从动轴(5)与所述移动底盘连接。
技术总结本申请公开了一种双向超越离合器及具有其的移动机器人,该双向超越离合器包括:主动轴,具有纵截面呈多边形的驱动段;保持架,包括多个围绕主动轴布置的安装块,安装块设置有安装孔,相邻两个安装块之间通过以使得相邻两个安装块具有相互靠近的趋势施压于安装块的弹性件相连;滚柱,与主动轴同向并排布置且转动设置于安装孔内;从动轴,具有内孔且套设于保持架外,内孔的内壁设置有多个用于与滚柱啮合的啮合槽;驱动段具有最大径向尺寸H和最小径向尺寸h,滚柱具有直径d,内孔具有最大内半径R和最小内半径r,其中,H+d>2R,h+d<2r。应用本申请能够实现主动轴相对从动轴的双向离合且可以防止从动轴反向带动主动轴旋转。技术研发人员:赵阳,那耀宗,田小锋,李斌受保护的技术使用者:杭州海康机器人股份有限公司技术研发日:20240118技术公布日:2024/12/23本文地址:https://www.jishuxx.com/zhuanli/20241226/345701.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种燃气稳压器的制作方法
下一篇
返回列表