轮胎式搬运机辅助驾驶系统、梁场中控系统及驾驶方法与流程
- 国知局
- 2025-01-10 13:15:10
本发明涉及工程机械,具体涉及轮胎式搬运机辅助驾驶系统、梁场中控系统及驾驶方法。
背景技术:
1、目前,在建设高架桥铁路时,一般采用轮胎式搬运机进行运梁,轮胎式搬运机需要人工操作。
2、相关技术中,高架桥铁路施工过程中,操作人员操作轮胎式搬运机进行梁片搬运,轮胎式搬运机主要是在梁场内部工作,将梁片从脱模台座转运至存梁台座,之后,运梁车将梁片转运至施工现场,进行桥体拼装。
3、但是,在前期施工过程中,施工任务较轻,操作人员的工作量不大,能够及时完成转运工作;当进入项目大干期间,脱模台座满负荷运转,大大增大了梁片的转运工作量,转运耗时费力;此外,整个梁片转运过程中,依赖于操作人员的操作经验,工作量太大以后,容易出现操作失误,施工安全的保障将会降低。
技术实现思路
1、本申请提供一种轮胎式搬运机辅助驾驶系统、梁场中控系统及驾驶方法,辅助轮胎式搬运机实现梁片的半自动化运输,大大降低操作工人的工作量,提升了转运效率和安全性。
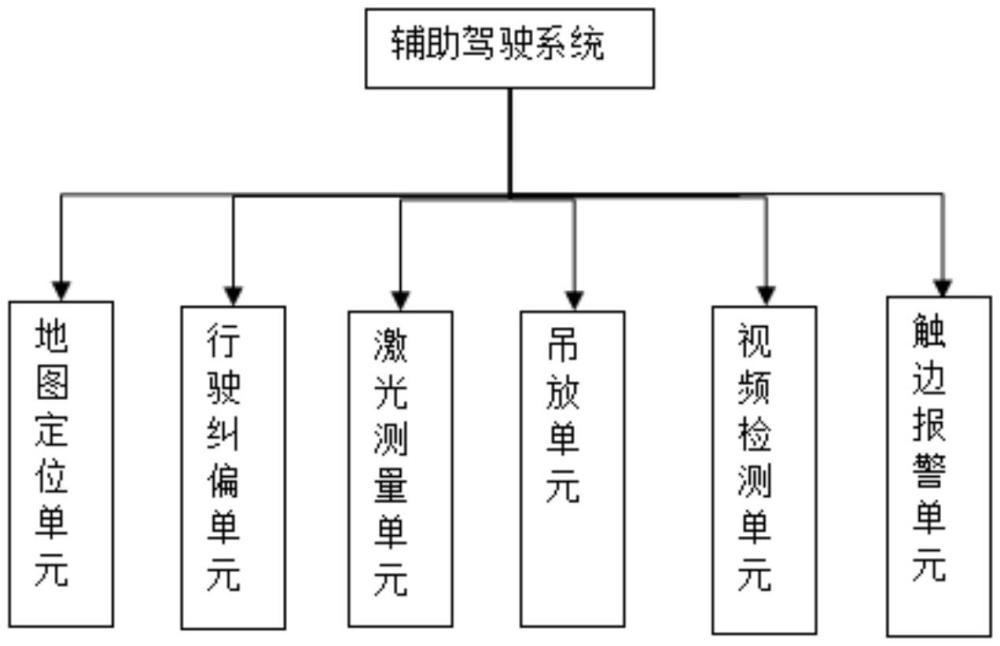
2、第一方面,本申请实施例提供一种轮胎式搬运机辅助驾驶系统,包含:
3、地图定位单元,用于预存梁场电子地图、在梁场电子地图中预设若干条从脱模台座至存梁台座的理论规划路线、以及在每条规划路线中标记运行切换点;还用于获取轮胎式搬运机在梁场电子地图中的前后实时位置;
4、行驶纠偏单元,用于根据脱模台座和存梁台座选定最近的所述理论规划路线,控制轮胎式搬运机沿理论规划路线行驶,获取轮胎式搬运机在梁场电子地图中的左右实时位置,并根据左右实时位置与选定理论规划路线的道路中线的偏移量,进行实时纠偏。
5、结合第一方面,在一种实施方式中,所述地图定位单元还用于在每条理论规划路线中标记运行切换点,所述梁场电子地图包含若干条纵横垂直交错的道路,所述运行切换点位于交叉的十字路口;
6、所述轮胎式搬运机设置若干伸缩支腿,所述行驶纠偏单元还用于在所述运行切换点控制轮胎式搬运机的所述伸缩支腿伸长至最低位抵持于地面,所述轮胎式搬运机的所有轮胎旋转进行前后直行形态和左右横行状态切换。
7、结合第一方面,在一种实施方式中,所述地图定位单元包含事先布设在梁场场区内的gps固定基站、以及设置于轮胎式搬运机中央的车载gps天线和数据处理板卡;所述gps固定基站、卫星和车载gps天线通过差分定位技术定位轮胎式搬运机的前后实时位置,所述数据处理板卡将定位的前后实时位置的绝对坐标转换至梁场电子地图内的相对坐标。
8、结合第一方面,在一种实施方式中,所述轮胎式搬运机包含第一驱动机构和第二驱动机构;
9、所述行驶纠偏单元包含数据处理器、及分别设置于第一驱动机构和第二驱动机构的左右方向中心点的两个车载gps天线;
10、两个所述车载gps天线实时获取两个驱动结构的左右实时位置,所述数据处理器计算两个驱动结构的左右方向中心点与理论规划路线中线的左右实时偏差,控制两个驱动机构进行实时纠偏。
11、结合第一方面,在一种实施方式中,所述数据处理板卡包含gnss模块和绘制模块;所述gnss模块用于事先将梁场的设计布置图转化为初步电子地图;所述绘制模块用于根据梁场的现场勘察数据修正初步电子地图,得到梁场电子地图。
12、结合第一方面,在一种实施方式中,所述辅助驾驶系统还包含激光测量单元和吊放单元,所述激光测量系统用于识别存梁台座或脱模台座上的梁片类型,所述吊放单元用于根据梁片类型控制轮胎式搬运机在存梁台座或脱模台座处控制起吊初始高度和吊后最终高度。
13、结合第一方面,在一种实施方式中,所述辅助驾驶系统还包含视频检测单元,所述视频检测单元用于实时获取轮胎式搬运机周边的视频,并反馈于远程显示屏。
14、结合第一方面,在一种实施方式中,所述辅助驾驶系统还包含触边报警单元,当轮胎式搬运机与外部障碍物发生接触时,所述触边报警单元控制轮胎式搬运机停止,并发出报警。
15、第二方面,本申请实施例提供了一种梁场中控系统,包含控制中心和若干具有上述辅助驾驶系统的轮胎式搬运机,所述控制中心远程同时调度所有所述轮胎式搬运机在梁场电子地图中运行。
16、第三方面,本申请实施例提供了一种基于上述辅助驾驶系统的辅助驾驶方法,包含以下步骤:
17、基于轮胎式搬运机所处的脱模台座在梁场电子地图的位置,选定要到达的存梁台座,行驶纠偏单元根据脱模台座和存梁台座选定最近的理论规划路线;
18、行驶纠偏单元控制轮胎式搬运机沿理论规划路线行驶;在行驶过程中,获取轮胎式搬运机在梁场电子地图中的左右实时位置,并根据左右实时位置与选定理论规划路线的道路中线的偏移量,进行实时纠偏。
19、本申请实施例提供的技术方案带来的有益效果包括:
20、1.本申请的辅助驾驶系统,包含地图定位单元和行驶纠偏单元,将梁场电子地图、理论规划路线及运行切换点事先预存于地图定位单元中,然后在实际行驶时,地图定位单元获取轮胎式搬运机在梁场电子地图的前后实时位置;行驶纠偏单元获取轮胎式搬运机在梁场电子地图的左右实时位置,当左右方向出现偏移时,进行实时纠偏,始终引导轮胎式搬运机沿着理论规划路线的正中间行驶;行驶纠偏单元还用于控制轮胎式搬运机在运行切换点进行直行和横行切换;本申请的辅助驾驶系统,能够自动走形于脱模台座(出发地)和存梁台座(目的地)之间,且进行左右自动纠偏,实现梁片半自动化安全、可靠运输,达到减少了操作工人的工作量,提升了梁片转运的效率。
21、2.本申请的辅助驾驶系统,基于特殊的纵横垂直交错的梁场电子地图,在运行切换点即十字路口进行前后直行形态和左右横行状态切换,在前后定位、左右定位自动行驶的基础上,进行自动转向控制,实现全地图灵活行驶,提升了梁片的转运效率。
22、3.本申请的梁场中控系统,控制中心远程同时调度所有轮胎式搬运机在梁场电子地图中运行,能够同时利用多个轮胎式搬运机进行梁片的搬运工作,大大提升了梁片转移的效率,节省了操作人员的时间和精力。
技术特征:1.一种轮胎式搬运机辅助驾驶系统,其特征在于,包含:
2.如权利要求1所述的一种轮胎式搬运机辅助驾驶系统,其特征在于:
3.如权利要求1所述的一种轮胎式搬运机辅助驾驶系统,其特征在于:
4.如权利要求1所述的一种轮胎式搬运机辅助驾驶系统,其特征在于:
5.如权利要求3所述的一种轮胎式搬运机辅助驾驶系统,其特征在于:所述数据处理板卡包含gnss模块和绘制模块;所述gnss模块用于事先将梁场的设计布置图转化为初步电子地图;所述绘制模块用于根据梁场的现场勘察数据修正初步电子地图,得到梁场电子地图(1)。
6.如权利要求1所述的一种轮胎式搬运机辅助驾驶系统,其特征在于:
7.如权利要求1所述的一种轮胎式搬运机辅助驾驶系统,其特征在于:
8.如权利要求1所述的一种轮胎式搬运机辅助驾驶系统,其特征在于:
9.一种梁场中控系统,其特征在于:包含控制中心和若干具有权利要求1~8任一所述辅助驾驶系统的轮胎式搬运机(12),所述控制中心远程同时调度所有所述轮胎式搬运机(12)在梁场电子地图(1)中运行。
10.一种基于权利要求1~8任一所述辅助驾驶系统的辅助驾驶方法,其特征在于,包含以下步骤:
技术总结本申请涉及工程机械技术领域,公开了轮胎式搬运机辅助驾驶系统、梁场中控系统及驾驶方法,辅助驾驶系统包含:地图定位单元,用于预存梁场电子地图、以及在梁场电子地图中预设若干理论规划路线;还用于获取轮胎式搬运机的前后实时位置;行驶纠偏单元,用于根据脱模台座和存梁台座选定最近的所述理论规划路线,控制轮胎式搬运机沿理论规划路线行驶,获取轮胎式搬运机在梁场电子地图中的左右实时位置,并根据左右实时位置与选定理论规划路线的道路中线的偏移量,进行实时纠偏。本申请的辅助驾驶系统、梁场中控系统及驾驶方法,辅助轮胎式搬运机实现梁片的半自动化运输,大大降低操作工人的工作量,提升了转运效率和安全性。技术研发人员:李国军,柴顺利,刘中轩,王光欣,陈记忠,孙植,张准,沈薛凯,刘志,何奕,卢聪受保护的技术使用者:中铁工程机械研究设计院有限公司技术研发日:技术公布日:2025/1/6本文地址:https://www.jishuxx.com/zhuanli/20250110/351910.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表