一种无人机航线的自动化检测方法、装置以及电子设备与流程
- 国知局
- 2025-01-10 13:17:16
本发明涉及无人机领域,尤其涉及一种无人机航线的自动化检测方法、装置以及电子设备。
背景技术:
1、近年来,随着无人机技术的快速发展,使用无人机开展侦察任务的应用越来越广泛。在这类侦察任务中,需要根据收到的侦察目标和范围进行无人机航线规划,完成目标的侦察、监测,采集到需要的侦察信息。
2、当前最常用的侦察航线规划方法是在无人机地面控制站软件中,在二维数字地图上手动规划无人机侦察任务航线。这种侦察航线规划方法需要手动设置多个航点的经纬度坐标,然后由无人机地面控制站软件自动进行航点连接,绘制成无人机飞行航线。然后将规划好的航线通过数据链路上传至无人机,无人机开始按照规划航线飞行。
3、人工绘制规划航线的方法有以下几种:
4、1)在地图上用鼠标人工手动添加航点,自主绘制航线。
5、2)在地图上用鼠标人工手动添加兴趣点(例如侦察目标点),然后在兴趣点周围自动生成环形航点并连接成航线。
6、在一些复杂环境下,当无人机收到侦察的目标区域或目标坐标后,需要根据目标位置在二维数字地图上快速规划出无人机飞行侦察航线,展开侦察活动,但是对于手动规划的无人机航线,经常遇到航线规划不合理的情况,有以下几种情况:
7、1)手动添加航点连接成的航线,没有充分考虑禁飞区约束,可能导致有部分航段穿过禁飞区。
8、2)手动绘制航线,没有考虑无人机爬升或俯冲角度和飞行高度约束。受限于操作人员的个人能力或者面对一些复杂、动态、多约束、高度不确定性的侦察环境,人工绘制的航线容易出现未充分考虑地面高程和地面障碍物影响,有部分航段高度过低,导致航线穿过地面物体,如山地、森林、高层建筑等,造成飞行危险。另外,现有技术规划出的无人机航线还存在航线高度剧烈变化以及反复震荡的情况,剧烈的高度变化或航线高度反复震荡可能导致无人机失去控制,极端情况下可能超出无人机的响应能力,造成机毁人忙的安全事故。
9、3)手动绘制航线,没有充分考虑环境约束、复杂气象区域约束等。
10、人工手动绘制无人机侦察任务航线,对人员的个人能力要求较高,且容易有疏漏,费时费力,难以适应侦察飞行时快速响应侦察任务规划航线的需要。因此亟需一种可以对规划的无人机航线进行快速自动化检测,并修改不合理的航点以及根据任务目标信息快速规划出新的飞行航线的技术方案。
技术实现思路
1、鉴于上述的分析,本发明实施例旨在提供一种无人机航线的自动化检测方法、装置以及电子设备,用以解决现有的无人机航线中经常出现航线规划不合理,难以适应多约束、动态等复杂环境下快速响应任务规划航线的需要的技术问题。
2、第一方面,本发明实施例提供了一种无人机航线的自动化检测方法,包括以下步骤:
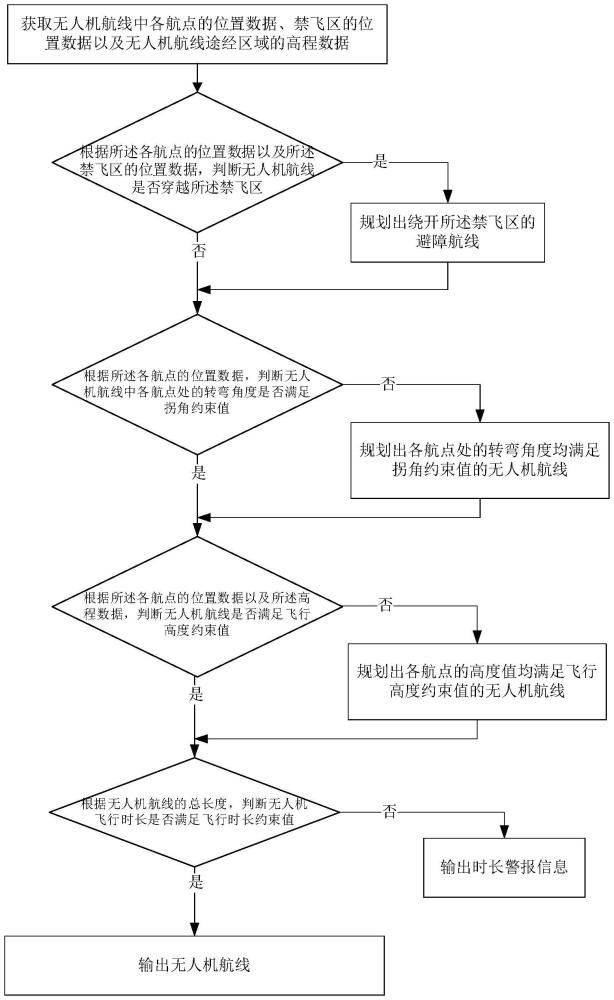
3、步骤110:获取无人机航线中各航点的位置数据、禁飞区的位置数据以及无人机航线途经区域的高程数据;
4、步骤120:根据所述各航点的位置数据以及所述禁飞区的位置数据,判断无人机航线是否穿越所述禁飞区,若是,则规划出绕开所述禁飞区的避障航线并进入步骤130,否则直接进入步骤130;
5、步骤130:根据所述各航点的位置数据,判断无人机航线中各航点处的转弯角度是否满足拐角约束值,若是,则直接进入步骤140,否则规划出各航点处的转弯角度均满足拐角约束值的无人机航线并进入步骤140;
6、步骤140:根据所述各航点的位置数据以及所述高程数据,判断无人机航线是否满足飞行高度约束值,若是,则直接进入步骤150,否则规划出各航点的高度值均满足飞行高度约束值的无人机航线并进入步骤150;
7、步骤150:根据无人机航线的总长度,判断无人机飞行时长是否满足飞行时长约束值,若是,则输出无人机航线,否则输出时长警报信息。
8、基于上述自动化检测方法的进一步改进,根据所述各航点的位置数据以及所述禁飞区的位置数据,判断无人机航线是否穿越所述禁飞区包括:
9、获取无人机航线中任一航段的两个航点的经纬度值;
10、根据所述两个航点的经纬度值,确定表示所述航段的直线模型;
11、获取所述禁飞区各顶点的经纬度值;
12、根据所述直线模型和所述禁飞区各顶点的经纬度值,确定所述航段是否穿越所述禁飞区。
13、基于上述自动化检测方法的进一步改进,所述规划出绕开所述禁飞区的避障航线包括:
14、步骤b10:获取无人机航线中穿越所述禁飞区的航段的两个端点的位置信息;
15、步骤b20:判断所述穿越禁飞区的航段的两个端点是否在所述禁飞区外,若是,则进入步骤b30;否则,从无人机航线中确定两个端点均在所述禁飞区外的多段互联的航段,进入步骤b30;其中,所述多段互联的航段包括所述穿越所述禁飞区的航段;
16、步骤b30:将在所述禁飞区外的所述两个端点设置为起点和终点,并根据所述起点、所述终点以及所述禁飞区的所有顶点的位置信息,确定可通行区域和非可通行区域;以及
17、步骤b40:基于所述可通行区域和非可通行区域利用路径规划算法生成从所述起点至所述终点的避障航线。
18、基于上述自动化检测方法的进一步改进,根据所述各航点的位置数据,判断无人机航线中各航点处的转弯角度是否满足拐角约束值包括:
19、获取无人机航线中的目标航点以及与所述目标航点分别在两侧相邻的第一航点和第二航点的位置信息;
20、根据所述目标航点、所述第一航点、所述第二航点的位置信息,确定无人机航线在所述目标航点的转弯角度;
21、判断所述转弯角度是否小于拐角阈值,若是,则所述目标航点处的转弯角度不满足拐角约束值,否则所述目标航点处的转弯角度满足拐角约束值。
22、基于上述自动化检测方法的进一步改进,所述规划出各航点的高度值均满足飞行高度约束值的无人机航线包括:
23、确定无人机在所述目标航点处的转弯半径;
24、根据所述转弯角度和所述转弯半径确定与第一航段和第二航段相切的内切圆,其中所述第一航段的两个端点为所述目标航点和所述第一航点,所述第二航段的两个端点为所述目标航点和所述第二航点;以及
25、根据所述内切圆,确定无人机在所述目标航点处的替代航线,其中所述替代航线中各个航点处的转弯角度大于或等于所述拐角阈值。
26、基于上述自动化检测方法的进一步改进,根据所述各航点的位置数据以及所述高程数据,判断无人机航线是否满足飞行高度约束值包括:
27、根据无人机航线中任一航段的两个端点的经纬度值,确定是否在所述航段上进行采样以及各采样点在所述航段上的位置;
28、根据所述两个端点的经纬度值以及各所述采样点的位置,获取所述两个端点以及各所述采样点的高程值;
29、判断各所述端点和各所述采样点的高程值与其初始高度值的差值是否满足安全阈值范围,若是,则无人机航线满足飞行高度约束值,否则无人机航线不满足飞行高度约束值。
30、基于上述自动化检测方法的进一步改进,所述规划出各航点的高度值均满足飞行高度约束值的无人机航线包括:
31、响应于任一所述端点或者任一所述采样点的高程值与其初始高度值的差值不满足安全阈值范围,增加相应所述端点或者相应所述采样点的初始高度值以使所述端点或者所述采样点的高程值与其初始高度值的差值满足安全阈值范围;以及
32、响应于增加初始高度值的所述采样点的个数大于或等于预设阈值,按照无人机的飞行方向对所述增加初始高度值的所述采样点进行编号,并根据所述采样点的编号确定所述采样点的当前高度。
33、基于上述自动化检测方法的进一步改进,步骤140还包括:
34、步骤1401:判断无人机航线中所有航段的所述两个端点和各所述采样点的当前高度是否小于无人机允许的最大飞行高度值,若是,则直接进入步骤150,否则将当前高度大于或等于无人机允许的最大飞行高度值的所述端点或者所述采样点的高度值修改为与无人机允许的最大飞行高度值相同并进入步骤1402;
35、步骤1402:判断修改后的所述端点或者所述采样点的当前高度是否小于无人机允许的最小飞行高度值,若是,则生成高度警报信息;否则进入步骤150。
36、第二方面,本发明实施例提供了一种无人机航线的自动化检测装置,包括:
37、获取模块,被配置为获取无人机航线中各航点的位置数据、禁飞区的位置数据以及无人机航线途经区域的高程数据;
38、安全性检测及优化模块,被配置为根据所述各航点的位置数据以及所述禁飞区的位置数据,判断无人机航线是否穿越所述禁飞区,若是,则规划出绕开所述禁飞区的避障航线并调用拐角检测及优化模块,否则直接调用拐角检测及优化模块;
39、拐角检测及优化模块,被配置为根据所述各航点的位置数据,判断无人机航线中各航点处的转弯角度是否满足拐角约束值,若是,则直接进入调用高度检测及优化模块,否则规划出各航点处的转弯角度均满足拐角约束值的无人机航线并调用高度检测及优化模块;
40、高度检测及优化模块,被配置为根据所述各航点的位置数据以及所述高程数据,判断无人机航线是否满足飞行高度约束值,若是,则直接调用飞行时长检测模块,否则规划出各航点的高度值均满足飞行高度约束值的无人机航线并调用飞行时长检测模块;
41、飞行时长检测模块,被配置为根据无人机航线的总长度,判断无人机飞行时长是否满足飞行时长约束值,若是,则输出无人机航线,否则输出警示信息。
42、第三方面,本发明实施例提供了一种电子设备,包括:
43、至少一个处理器;
44、与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行本发明第一方面任一项所述的无人机航线的自动化检测方法。
45、与现有技术相比,本发明至少可实现如下有益效果之一:
46、1、本发明方案通过引入航线自动化测试算法,将自动化测试技术引入到航线检查中,自动化实现对航线高程、禁飞区域、环境约束、航线拐角等检查,满足复杂、动态、多约束、高度不确定性等复杂环境下快速响应任务规划航线的需要。
47、2、本发明方案能够为复杂环境下,提供快速检测手动规划无人机航线的算法,并给出航线优化方案,大幅度提高航线检查效率,帮助无人机快速完成既定任务,并避免机毁坠亡等灾难事故发生。
48、本发明中,上述各技术方案之间还可以相互组合,以实现更多的优选组合方案。本发明的其他特征和优点将在随后的说明书中阐述,并且,部分优点可从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过说明书以及附图中所特别指出的内容中来实现和获得。
本文地址:https://www.jishuxx.com/zhuanli/20250110/352166.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。