海上风电机组的运行模式切换控制方法及装置与流程
- 国知局
- 2025-01-10 13:19:29
本技术涉及数据处理领域,尤其涉及一种海上风电机组的运行模式切换控制方法及装置。
背景技术:
1、现有的海上风电机组运行模式切换控制方法主要依赖于预设的固定阈值和简单的逻辑判断。这些方法通常基于风速、功率输出等单一参数进行模式切换决策,并采用固定的控制参数进行执行器调节。部分先进的控制系统引入了模糊控制和神经网络等智能算法,以提高控制的灵活性和适应性。
2、然而,这些现有技术在面对复杂多变的海上环境时,往往难以做出及时、准确的模式切换决策。固定阈值难以适应不同海况下的最佳运行状态,简单的逻辑判断无法充分考虑多参数之间的耦合关系。同时,缺乏对历史数据的深度挖掘和学习,导致控制策略难以持续优化和适应设备老化等长期变化。此外,现有方法在执行模式切换时,对各执行器的协同控制不够精确,容易引起机组振动和载荷波动,影响设备寿命和发电效率。
技术实现思路
1、本技术提供了一种海上风电机组的运行模式切换控制方法及装置,用于提高海上风电机组的运行模式切换控制的效率及准确率。
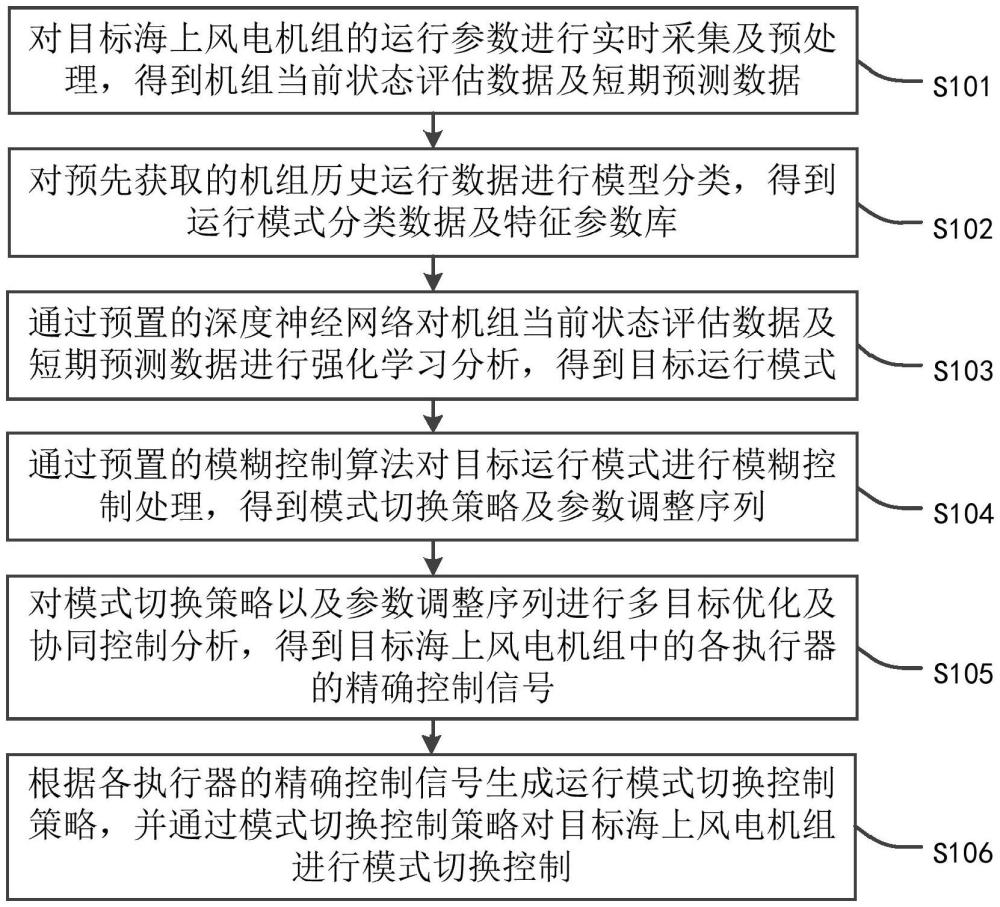
2、第一方面,本技术提供了一种海上风电机组的运行模式切换控制方法,所述海上风电机组的运行模式切换控制方法包括:对目标海上风电机组的运行参数进行实时采集及预处理,得到机组当前状态评估数据及短期预测数据;对预先获取的机组历史运行数据进行模型分类,得到运行模式分类数据及特征参数库;通过预置的深度神经网络对所述机组当前状态评估数据及所述短期预测数据进行强化学习分析,得到目标运行模式;通过预置的模糊控制算法对所述目标运行模式进行模糊控制处理,得到模式切换策略及参数调整序列;对所述模式切换策略以及所述参数调整序列进行多目标优化及协同控制分析,得到所述目标海上风电机组中的各执行器的精确控制信号;根据各执行器的精确控制信号生成运行模式切换控制策略,并通过所述模式切换控制策略对所述目标海上风电机组进行模式切换控制。
3、结合第一方面,在本技术第一方面的第一种实现方式中,所述对目标海上风电机组的运行参数进行实时采集及预处理,得到机组当前状态评估数据及短期预测数据,包括:对所述目标海上风电机组的风速、风向、湍流强度、波浪高度及潮汐情况进行实时监测,得到环境参数数据;对所述目标海上风电机组的功率输出、叶片俯仰角、轮毂转速、主轴承温度、齿轮箱振动及发电机电流进行实时采集,得到机组运行参数数据;对所述环境参数数据及所述机组运行参数数据进行去噪处理,得到预处理后的环境参数数据及机组运行参数数据;对所述预处理后的环境参数数据进行时间序列分析,得到短期环境预测数据;对所述预处理后的机组运行参数数据进行统计分析,得到机组当前运行状态数据;通过支持向量回归算法对所述短期环境预测数据进行回归分析,得到环境参数预测值;通过模糊推理算法对所述机组当前运行状态数据进行评估,得到机组当前状态评估结果;对所述环境参数预测值及所述机组当前状态评估结果进行数据融合,得到综合状态预测数据;通过卡尔曼滤波算法对所述综合状态预测数据进行滤波处理,得到优化后的状态预测数据;对所述优化后的状态预测数据进行阈值判断,得到所述机组当前状态评估数据及所述短期预测数据。
4、结合第一方面,在本技术第一方面的第二种实现方式中,所述对预先获取的机组历史运行数据进行模型分类,得到运行模式分类数据及特征参数库,包括:对所述机组历史运行数据进行数据清洗,得到有效历史数据集;对所述有效历史数据集进行时间序列分割,得到多个时间窗口数据;通过主成分分析算法对所述多个时间窗口数据进行特征提取,得到降维特征数据;对所述降维特征数据进行聚类分析,得到初步运行模式类别;通过支持向量机算法对所述初步运行模式类别进行边界优化,得到优化后的运行模式类别;对所述优化后的运行模式类别进行标签化处理,得到标记后的运行模式数据;通过决策树算法对所述标记后的运行模式数据进行规则提取,得到运行模式分类规则;对所述运行模式分类规则进行交叉验证,得到验证后的分类规则;通过模糊c均值算法对所述验证后的分类规则进行模糊边界处理,得到模糊分类规则;对所述模糊分类规则及所述降维特征数据进行关联分析,得到所述运行模式分类数据及所述特征参数库。
5、结合第一方面,在本技术第一方面的第三种实现方式中,所述通过预置的深度神经网络对所述机组当前状态评估数据及所述短期预测数据进行强化学习分析,得到目标运行模式,包括:对所述机组当前状态评估数据及所述短期预测数据进行数据融合,得到综合状态数据;通过自编码器算法对所述综合状态数据进行特征提取,得到压缩特征向量;对所述压缩特征向量进行归一化处理,得到标准化特征数据;通过深度q网络算法对所述标准化特征数据进行状态空间映射,得到状态表示;对所述状态表示进行动作空间离散化,得到候选动作集;通过蒙特卡洛树搜索算法对所述候选动作集进行探索,得到最优动作序列;对所述最优动作序列进行奖励函数评估,得到动作价值估计;通过策略梯度算法对所述动作价值估计进行梯度更新,得到优化后的策略参数;对所述优化后的策略参数进行贝叶斯推断,得到运行模式概率分布;通过最大后验概率准则对所述运行模式概率分布进行决策,得到所述目标运行模式。
6、结合第一方面,在本技术第一方面的第四种实现方式中,所述通过预置的模糊控制算法对所述目标运行模式进行模糊控制处理,得到模式切换策略及参数调整序列,包括:对所述目标运行模式进行特征提取,得到模式特征向量;对所述模式特征向量进行模糊化处理,得到模糊输入集;通过模糊推理机对所述模糊输入集进行规则匹配,得到激活规则集;对所述激活规则集进行模糊推理运算,得到模糊输出集;通过重心法对所述模糊输出集进行解模糊化处理,得到初步切换策略;对所述初步切换策略进行安全性评估,得到安全切换区间;通过自适应模糊pid算法对所述安全切换区间进行参数优化,得到优化后的切换参数;对所述优化后的切换参数进行时序排列,得到参数调整序列;通过模糊认知图算法对所述参数调整序列进行因果关系分析,得到切换影响因子;对所述切换影响因子及所述参数调整序列进行综合处理,得到所述模式切换策略及所述参数调整序列。
7、结合第一方面,在本技术第一方面的第五种实现方式中,所述对所述模式切换策略以及所述参数调整序列进行多目标优化及协同控制分析,得到所述目标海上风电机组中的各执行器的精确控制信号,包括:对所述模式切换策略及所述参数调整序列进行解耦分析,得到各执行器初始控制目标;对所述各执行器初始控制目标进行约束条件设定,得到优化问题的边界条件;通过多目标遗传算法对所述优化问题进行求解,得到帕累托最优解集;对所述帕累托最优解集进行层次分析,得到各目标的权重系数;通过模糊综合评价方法对所述帕累托最优解集进行评价,得到最优解;对所述最优解进行执行器分配,得到各执行器的初步控制信号;通过模型预测控制算法对所述各执行器的初步控制信号进行前馈优化,得到优化后的控制序列;对所述优化后的控制序列进行稳定性分析,得到稳定性评估结果;通过h无穷控制算法对所述优化后的控制序列进行鲁棒性增强,得到鲁棒控制信号;对所述鲁棒控制信号进行动态补偿,得到所述各执行器的精确控制信号。
8、结合第一方面,在本技术第一方面的第六种实现方式中,所述根据各执行器的精确控制信号生成运行模式切换控制策略,并通过所述模式切换控制策略对所述目标海上风电机组进行模式切换控制,包括:对所述各执行器的精确控制信号进行时序排列,得到控制序列;通过动态规划算法对所述控制序列进行优化,得到最优控制路径;对所述最优控制路径进行分段处理,得到阶段控制目标;通过模糊逻辑控制器对所述阶段控制目标进行模糊推理,得到模糊控制规则;对所述模糊控制规则进行去模糊化处理,得到精确控制指令;通过滑模控制算法对所述精确控制指令进行鲁棒性增强,得到抗扰动控制策略;对所述抗扰动控制策略进行安全性评估,得到安全控制边界;通过自适应控制算法对所述安全控制边界内的控制参数进行在线调整,得到自适应控制策略;对所述自适应控制策略进行仿真验证,得到控制效果评估结果;根据所述控制效果评估结果对所述自适应控制策略进行微调,得到所述运行模式切换控制策略。
9、第二方面,本技术提供了一种海上风电机组的运行模式切换控制装置,所述海上风电机组的运行模式切换控制装置包括:
10、获取模块,用于对目标海上风电机组的运行参数进行实时采集及预处理,得到机组当前状态评估数据及短期预测数据;
11、分类模块,用于对预先获取的机组历史运行数据进行模型分类,得到运行模式分类数据及特征参数库;
12、分析模块,用于通过预置的深度神经网络对所述机组当前状态评估数据及所述短期预测数据进行强化学习分析,得到目标运行模式;
13、处理模块,用于通过预置的模糊控制算法对所述目标运行模式进行模糊控制处理,得到模式切换策略及参数调整序列;
14、控制模块,用于对所述模式切换策略以及所述参数调整序列进行多目标优化及协同控制分析,得到所述目标海上风电机组中的各执行器的精确控制信号;
15、切换模块,用于根据各执行器的精确控制信号生成运行模式切换控制策略,并通过所述模式切换控制策略对所述目标海上风电机组进行模式切换控制。
16、本技术第三方面提供了一种海上风电机组的运行模式切换控制设备,包括:存储器及至少一个处理器,所述存储器中存储有指令;所述至少一个处理器调用所述存储器中的所述指令,以使得所述海上风电机组的运行模式切换控制设备执行上述的海上风电机组的运行模式切换控制方法。
17、本技术的第四方面提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有指令,当其在计算机上运行时,使得计算机执行上述的海上风电机组的运行模式切换控制方法。
18、本技术提供的技术方案中,通过对目标海上风电机组的运行参数进行实时采集和预处理,结合小波变换去噪、时间序列分析、支持向量回归和卡尔曼滤波等算法,实现了对机组当前状态和短期趋势的精确评估,为后续决策提供了高质量的数据基础。其次,对历史运行数据进行深度挖掘和模型分类,利用主成分分析、支持向量机、决策树和模糊c均值等算法,构建了全面的运行模式分类数据和特征参数库,大幅提升了模式识别的准确性和鲁棒性。再次,采用深度神经网络进行强化学习分析,通过自编码器、深度q网络、蒙特卡洛树搜索和策略梯度等先进算法,实现了对复杂环境下最优运行模式的智能选择,显著提高了决策的适应性和前瞻性。此外,引入模糊控制算法进行模式切换策略的制定,结合自适应模糊pid和模糊认知图等技术,实现了切换过程的平滑性和安全性。在执行器控制方面,采用多目标优化和协同控制分析,综合运用多目标遗传算法、模糊综合评价、模型预测控制和h无穷控制等方法,得到了各执行器的精确控制信号,有效解决了执行器之间的耦合问题,提高了控制的精度和稳定性。最后,在生成最终的运行模式切换控制策略时,通过动态规划、模糊逻辑控制、滑模控制和自适应控制等算法的综合应用,实现了控制策略的实时优化和动态调整,进一步增强了系统的鲁棒性和适应性。这种多层次、多算法的融合应用,不仅显著提升了海上风电机组在复杂海况下的运行效率和可靠性,还为大规模海上风电场的智能化运维提供了新的技术路径。同时,本方法的模块化设计和自适应优化机制,使其具有良好的可扩展性和持续改进能力,能够不断适应新的环境变化和设备状态,延长海上风电机组的使用寿命,降低运维成本,提高发电效益。
本文地址:https://www.jishuxx.com/zhuanli/20250110/352415.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表