一种多组液压缸升降速度控制方法及系统与流程
- 国知局
- 2025-01-10 13:29:40
本技术涉及液压缸控制,特别是涉及一种多组液压缸升降速度控制方法及系统。
背景技术:
1、液压升降设备作为一种重要工具,在各类机械结构、桥梁建筑、航空航天、海工船舶及生活中的各种场景都有着广泛地应用。
2、轧钢生产成品后轧件移送设备,原先移送设备均采用液压系统通过多组液压缸作为动力实现整体传动装置的上升和下降功能,然后由小车通过输送链运输,在这过程中,多组液压缸升降速度很难达到升降一致,造成轧后倍尺在运输过程中存在弯曲现象。
技术实现思路
1、本技术的目的是:为解决上述技术问题,本技术提供了一种多组液压缸升降速度控制方法及系统,旨在提高多组液压缸在运行时的同步性,提高轧后倍尺的运输质量。
2、本技术的一些实施例中,根据预设反馈时间节点对全部液压缸的运行状态进行周期性判断,并通过内置速度偏差和位移偏差的双重调节方式,对全部液压缸的运行参数进行修正,从而保证全部液压缸的同步性,避免轧后倍尺在运输时出现弯曲状态,提高轧后倍尺的运输指令。
3、本技术的一些实施例中,根据各个液压缸的位置关系,建立相互之间的关联关系,并基于全部液压缸的整体运行状态和目标液压缸的周围液压缸的运行参数对目标液压缸的运行速度进行调节,避免单个液压缸的调节量过大,保证多组液压缸整体运行过程中的稳定性。
4、本技术的一些实施例中,提供了一种多组液压缸升降速度控制方法,包括:
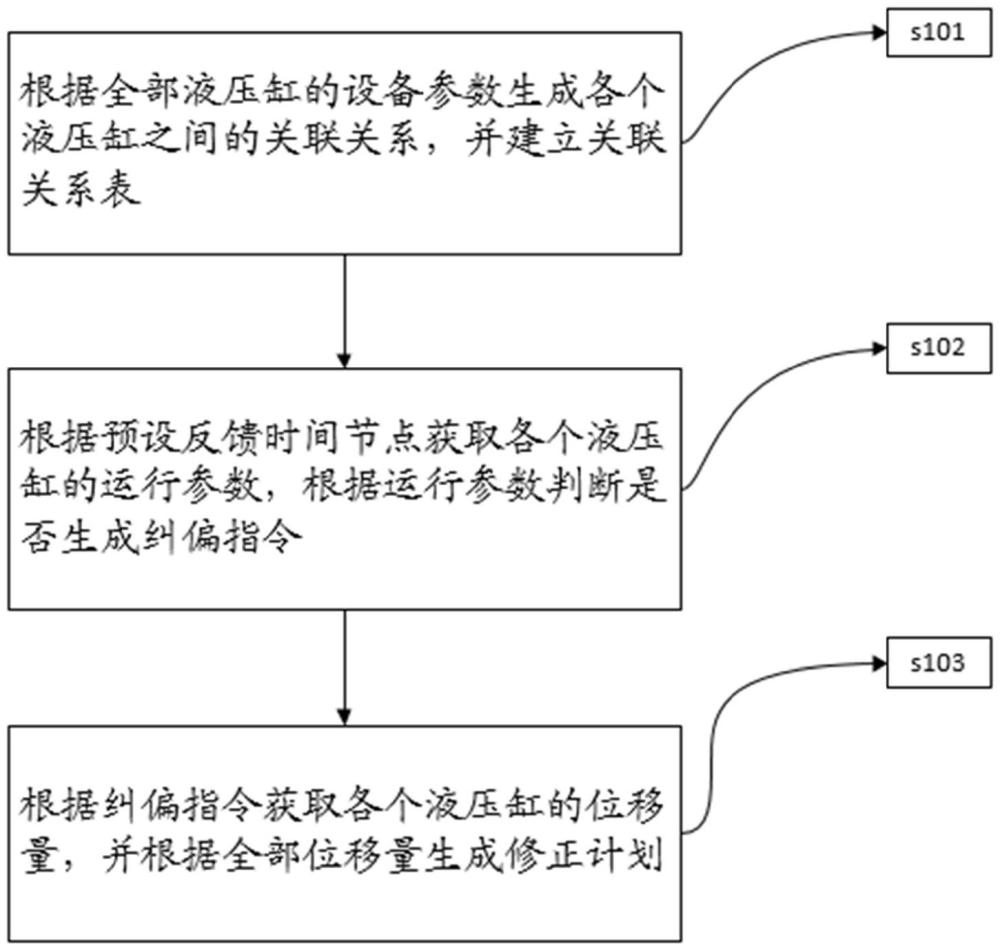
5、根据全部液压缸的设备参数生成各个液压缸之间的关联关系,并建立关联关系表;
6、根据预设反馈时间节点获取各个液压缸的运行参数,根据运行参数判断是否生成纠偏指令;
7、根据纠偏指令获取各个液压缸的位移量,并根据全部位移量生成修正计划。
8、本技术的一些实施例中,所述建立关联关系表时,包括:
9、预设液压缸数列a,a=(a1,a2…an),其中,n为液压缸数量,ai为第i个液压缸;
10、根据液压缸数列a依次选取目标液压缸:
11、根据预设关联模型生成目标液压缸的关联评价值数列b,b=(b1,b2…bn),其中,bi为目标液压缸与第i个液压缸之间的关联评价值;
12、预设第一关联评价值区间(b1,b2);
13、若bi处于预设第一关联评价值区间时,设定ai为目标液压缸的一级关联液压缸;
14、根据目标液压缸的全部一级关联液压缸建立目标液压缸的关联数据包;
15、依次生成各个液压缸的关联数据包,并根据全部关联数据包建立关联关系表。
16、本技术的一些实施例中,所述根据运行参数判断是否生成纠偏指令时,包括:
17、建立当前反馈时间节点的速度数列v,v=(v1,v2…vn),其中,vi为第i个液压缸的实时速度;
18、根据速度数列v生成当前反馈时间节点的运行评价值f;
19、
20、其中,v'为液压缸的标准运行速度,δv为速度数列v中全部速度的平均值;vmax为速度数列v中的最大值;vmin为速度数列v中的最小值;q1为预设第一固定系数;q2为预设第二固定系数;q3为预设第三固定系数;
21、预设第一运行评价值阈值f1和第二运行评价值阈值f2;
22、若f1<f<f2,生成一级纠偏指令,并根据一级纠偏指令生成位移偏差评价值g,根据位移偏差评价值g判断是否生成二级纠偏指令;
23、若f>f2,生成二级纠偏指令。
24、本技术的一些实施例中,生成偏差评价值g时,包括:
25、建立当前反馈时间节点的位移量数列c,c=(c1,c2…cn),其中,ci为当前反馈时间节点第i个液压缸的位移量;
26、根据位移量数列c和速度数列v生成偏差评价值g;
27、
28、其中,△t为预设标准时间间隔,q4为预设第四固定系数;△c为位移量数列c中全部位移量的平均值;
29、预设第一偏差评价值阈值;
30、若当前反馈时间节点的偏差评价值g小于预设第一偏差评价值阈值,根据偏差评价值g设定当前反馈时间节点和下一反馈时间节点之间的时间间隔t;
31、若当前反馈时间节点的偏差评价值g大于预设第一偏差评价值阈值,生成二级纠偏指令。
32、本技术的一些实施例中,设定当前反馈时间节点和下一反馈时间节点之间的时间间隔t时,包括:
33、预设第一偏差评价值区间(g1,g2),第二偏差评价值区间(g2,g3)和第三偏差评价值区间(g3,g4);
34、若偏差评价值g处于预设第一偏差评价值区间时,设定时间间隔t为预设第一时间间隔t1,即t=t1;
35、若偏差评价值g处于预设第二偏差评价值区间时,设定时间间隔t为预设第二时间间隔t2,即t=t2;
36、若偏差评价值g处于预设第三偏差评价值区间时,设定时间间隔t为预设第三时间间隔t3,即t=t3;且t1>t2>t3。
37、本技术的一些实施例中,根据全部位移量生成修正计划时,包括:
38、根据二级纠偏指令获取当前反馈时间节点的位移量数列c,c=(c1,c2…cn);
39、根据位移量数列c设定锚定液压缸;
40、依次生成各个液压缸和锚定液压缸之间的位移偏差量,并建立当前时间节点的位移偏差量数列h,h=(h1,h2…hn),其中,hi为第i个液压缸与锚定液压缸之间的位移偏差量;
41、建立速度调节模型;
42、pi=(e1*hi+e2*di)/t';
43、其中,pi为第i个液压缸的速度调节量,e1为预设第一权重系数,e2为第二权重系数,di为第i个液压缸的位移量和其对应的全部一级关联液压缸的位移量平均值之间的差值;t'为调节时长;
44、根据全部速度调节量生成修正计划。
45、本技术的一些实施例中,提供了一种多组液压缸升降速度控制系统,包括:
46、中控单元,用于根据全部液压缸的设备参数生成各个液压缸之间的关联关系,并建立关联关系表;
47、监测单元,包括多个监测子模块,所述监测子模块用于采集液压缸的运行参数;
48、所述中控单元还包括:
49、第一判断模块,用于根据预设反馈时间节点获取各个液压缸的运行参数,根据运行参数判断是否生成纠偏指令;
50、第一处理模块,用于根据纠偏指令获取各个液压缸的位移量,并根据全部位移量生成修正计划;
51、第二处理模块,用于建立关联关系表;
52、所述建立关联关系表时,包括:
53、预设液压缸数列a,a=(a1,a2…an),其中,n为液压缸数量,ai为第i个液压缸;
54、根据液压缸数列a依次选取目标液压缸:
55、根据预设关联模型生成目标液压缸的关联评价值数列b,b=(b1,b2…bn),其中,bi为目标液压缸与第i个液压缸之间的关联评价值;
56、预设第一关联评价值区间(b1,b2);
57、若bi处于预设第一关联评价值区间时,设定ai为目标液压缸的一级关联液压缸;
58、根据目标液压缸的全部一级关联液压缸建立目标液压缸的关联数据包;
59、依次生成各个液压缸的关联数据包,并根据全部关联数据包建立关联关系表。
60、本技术的一些实施例中,所述第一判断模块还用于:
61、建立当前反馈时间节点的速度数列v,v=(v1,v2…vn),其中,vi为第i个液压缸的实时速度;
62、根据速度数列v生成当前反馈时间节点的运行评价值f;
63、
64、其中,v'为液压缸的标准运行速度,△v为速度数列v中全部速度的平均值;vmax为速度数列v中的最大值;vmin为速度数列v中的最小值;q1为预设第一固定系数;q2为预设第二固定系数;q3为预设第三固定系数;
65、预设第一运行评价值阈值f1和第二运行评价值阈值f2;
66、若f1<f<f2,生成一级纠偏指令,并根据一级纠偏指令生成位移偏差评价值g,根据位移偏差评价值g判断是否生成二级纠偏指令;
67、若f>f2,生成二级纠偏指令。
68、本技术的一些实施例中,所述第一判断模块还用于:
69、建立当前反馈时间节点的位移量数列c,c=(c1,c2…cn),其中,ci为当前反馈时间节点第i个液压缸的位移量;
70、根据位移量数列c和速度数列v生成偏差评价值g;
71、
72、其中,△t为预设标准时间间隔,q4为预设第四固定系数;△c为位移量数列c中全部位移量的平均值;
73、预设第一偏差评价值阈值;
74、若当前反馈时间节点的偏差评价值g小于预设第一偏差评价值阈值,根据偏差评价值g设定当前反馈时间节点和下一反馈时间节点之间的时间间隔t;
75、若当前反馈时间节点的偏差评价值g大于预设第一偏差评价值阈值,生成二级纠偏指令。
76、本技术的一些实施例中,所述第一处理模块还用于:
77、根据二级纠偏指令获取当前反馈时间节点的位移量数列c,c=(c1,c2…cn);
78、根据位移量数列c设定锚定液压缸;
79、依次生成各个液压缸和锚定液压缸之间的位移偏差量,并建立当前时间节点的位移偏差量数列h,h=(h1,h2…hn),其中,hi为第i个液压缸与锚定液压缸之间的位移偏差量;
80、建立速度调节模型;
81、pi=(e1*hi+e2*di)/t';
82、其中,pi为第i个液压缸的速度调节量,e1为预设第一权重系数,e2为第二权重系数,di为第i个液压缸的位移量和其对应的全部一级关联液压缸的位移量平均值之间的差值;t'为调节时长;
83、根据全部速度调节量生成修正计划。
84、本技术实施例一种多组液压缸升降速度控制方法及系统与现有技术相比,其有益效果在于:
85、根据预设反馈时间节点对全部液压缸的运行状态进行周期性判断,并通过内置速度偏差和位移偏差的双重调节方式,对全部液压缸的运行参数进行修正,从而保证全部液压缸的同步性,避免轧后倍尺在运输时出现弯曲状态,提高轧后倍尺的运输指令。
86、根据各个液压缸的位置关系,建立相互之间的关联关系,并基于全部液压缸的整体运行状态和目标液压缸的周围液压缸的运行参数对目标液压缸的运行速度进行调节,避免单个液压缸的调节量过大,保证多组液压缸整体运行过程中的稳定性。
本文地址:https://www.jishuxx.com/zhuanli/20250110/353464.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表