一种带有运动载荷的多级卫星平台姿态动态补偿控制方法与流程
- 国知局
- 2025-01-10 13:31:09
本发明涉及一种带有运动载荷的多级卫星平台姿态动态补偿控制方法,属于卫星姿态控制领域。
背景技术:
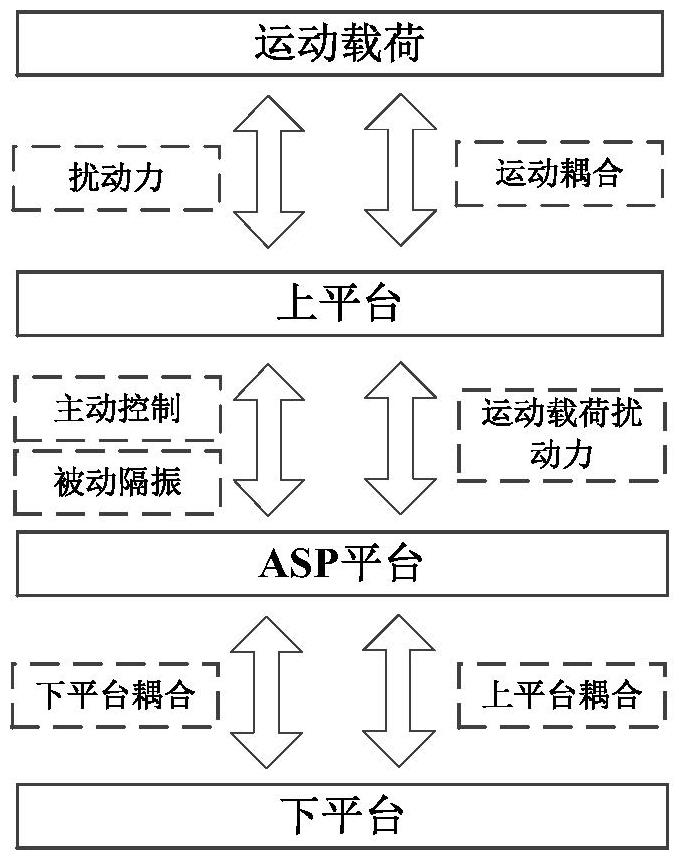
1、高轨高光谱卫星在成像过程中需要保持超高的姿态稳定度来实现高分辨率的对地观测能力,但是卫星运动载荷的周期性运动对星体平台产生扰动,加重了多级卫星平台的姿态耦合现象,严重影响多级卫星平台的姿态稳定度与载荷的对地观测能力;在多级控制系统快慢控制周期与敏感器存在时延的情况下,仅利用反馈测量的多级卫星姿态控制系统不能完全消除运动载荷周期性的耦合扰动,进一步降低了多级卫星平台的姿态控制精度和稳定度。
2、面对带有运动载荷的新型多级卫星平台,以往针对传统单级卫星的姿态前馈补偿控制方法存在以下不足:(1)带有运动载荷多级卫星平台的多级耦合现象严重,仅利用反馈测量的传统单级姿态控制方法不能完全消除运动载荷周期性的耦合扰动,降低了多级卫星平台的姿态控制精度和稳定度;(2)多级卫星平台独有的一、二级控制使多级控制系统包含两种不同的控制周期,传统的卫星姿态补偿控制方法不适用于具有不同控制周期的多级卫星平台;(3)工程应用中,前馈姿态补偿的效果严重依赖敏感器测量的真实性与角动量补偿的准确性,时延的存在导致姿态测量值与实际值相差巨大,降低了前馈姿态补偿控制算法的补偿效果。
技术实现思路
1、本发明解决的技术问题是:克服现有技术的不足,针对多级耦合扰动、快慢控制周期、前馈补偿不精确与测量时延存在时的多级卫星平台姿态控制问题,设计了一种带有运动载荷的多级卫星平台姿态动态补偿控制方法,该方法计算量不大,控制逻辑清晰简洁,实用性较好。
2、本发明的技术方案是:一种带有运动载荷的多级卫星平台姿态动态补偿控制方法,包括:
3、根据带有运动载荷的多级卫星结构,建立多级卫星的动力学模型;
4、根据得到的多级卫星的动力学模型,设计多级卫星上、下平台的补偿控制器,并对卫星上、下平台姿态进行补偿;
5、根据建立的多级卫星的动力学模型,设计多步预报动态前馈补偿控制器,并对星体下平台姿态进行动态前馈补偿。
6、所述多级卫星包括星体下平台和上平台,则多级卫星的动力学模型包括多级卫星上、下平台的动力学模型,分别为::
7、
8、式中,ωb分别表示下平台角速度和角加速度,ib表示下平台惯量矩阵,mds表示下平台受到的干扰力矩,τb表示下平台受到的控制力矩,mps表示上平台对下平台的作用力矩;ip表示上平台的惯量,iguh,iwuh分别表示在上平台坐标系下运动载荷的旋转框架惯量和旋转扫描镜惯量,sgu,swu表示运动载荷的旋转框架惯量积和旋转扫描镜惯量积,分别表示旋转框架和旋转扫描镜的角加速度,tu表示上平台受到的控制力矩;iσuh为旋转框架惯量在旋转框架坐标系下的表示,iωuh为旋转扫描镜惯量在旋转扫描镜坐标系下的表示;γz=[0 0 1]t,γx=[1 0 0]t;l表示上平台受到的扰动力矩。
9、所述扰动力矩l具体表示为:
10、
11、其中ω表示旋转扫描镜角速度、为表示在旋转框架坐标系下旋转框架惯量的导数、表示旋转框架角速度、为表示在旋转扫描镜坐标系下旋转扫描镜惯量的导数、ωp表示上平台角速度、hs表示旋转扫描附件角动量、vp表示上平台速度、ps表示旋转扫描镜动量,为表示在上平台坐标系下旋转框架惯量的导数,为表示在上平台坐标系下旋转扫描镜惯量的导数。
12、所述多级卫星下平台的补偿控制器为
13、τb=kbp1qbe+kbi1∫qbedt+kbd1δωbe+τcb
14、其中kbp1,kbi1,kbd1为下平台姿态pid控制器的控制参数,分别表示比例参数、积分参数和微分参数;qbe表示下平台姿态误差四元数,δωbe表示角速度误差。
15、下平台采用角动量的方式对下平台姿态进行控制补偿,在下平台的控制周期t中,对于下平台的姿态补偿力矩τcb具体为:
16、
17、其中δhb为下平台t周期内的角动量补偿值,计算方法如下:
18、
19、其中,t表示上平台的控制周期;f2i为第i个t周期内上平台受到的运动扫描镜的平均干扰力矩,具体计算方式如下:
20、
21、其中符号表示变量在t周期内的平均值。
22、所述多级卫星上平台的补偿控制器为
23、τp=kpp1qpe+kpi1∫qpedt+kpd1δωpe+f2'
24、其中kpp1,kpi1,kpd1表示上平台姿态pid控制器的控制参数,分别表示比例参数、积分参数和微分参数;qpe表示上平台姿态误差四元数,δωpe表示角速度误差;
25、上平台采用力补偿的方式对卫星上平台的扰动进行补偿,上平台的姿态补偿力矩为
26、根据建立的多级卫星的动力学模型,设计多步预报动态前馈补偿控制器,并对星体下平台姿态进行动态前馈补偿,包括:
27、根据多级卫星的动力学模型,设置采样周期t,将多级卫星的动力学模型离散化为
28、x(k+1)=fx(k)+g[u(k)+w(k)]
29、其中,u(k)表示离散系统的输入,w(k)表示系统的非线性输入;g表示输入矩阵,f表示系统矩阵;
30、则多步预报观测器如下:
31、
32、其中表示预报状态值,k表示增益矩阵,c为观测矩阵;
33、令多步预报误差则多步预报误差方程为:
34、
35、找到误差增益矩阵k使fn+1-kc的特征根在单位圆内,并将预报值代替下平台的测量值qbe、δωbe,并更新星体下平台控制器τb;
36、设计动态前馈姿态补偿控制器,对星体下平台进行姿态动态前馈补偿,所述星体下平台动态前馈补偿控制器为:
37、τb=kbp1qbe'+kbi1∫qbe'dt+kbd1δωbe'+τck
38、其中,qbe',δωbe'为多步预报观测器预报值,τck表示星体下平台的动态前馈补偿力矩。
39、所述输入矩阵g与系统矩阵f的计算方法如下:
40、g=g1b
41、
42、其中a表示多级卫星连续模型中的状态矩阵,b表示输入矩阵,i表示单位矩阵。
43、所述星体下平台的动态前馈补偿力矩τck的计算方式如下:
44、τck=τcb+α(τpb-τcb)
45、其中τpb表示asp平台对下平台的反作用力,α表示动态补偿系数增益。
46、本发明与现有技术相比的优点在于:
47、(1)仅利用反馈测量的传统单级姿态控制方法不能完全消除多级卫星平台中运动载荷所产生的周期性耦合扰动,本发明提供的一种带有运动载荷的多级卫星平台姿态动态补偿控制方法,结合运动扫描附件的精细化动力学模型及其运动规律,利用多级卫星平台扰动的传递特性,对以asp平台为基础的上平台控制系统和下平台的一级控制系统同时设计多级卫星系统的姿态前馈补偿控制器,可提高多级卫星的姿态稳定性;
48、(2)本发明首次针对多级卫星平台特有的快慢控制周期特点,在下平台控制周期内计算下平台受到的扰动,并基于角动量守恒原理设计了下平台的姿态前馈补偿控制器;在上平台控制周期内利用运动载荷的期望轨迹计算扰动力矩,并基于力矩补偿的方式设计了上平台的姿态前馈补偿控制器。本发明设计的姿态前馈补偿控制器在多级卫星平台特有的快慢控制周期情况下,可实现多级扰动的同步、精确补偿。
49、(3)本发明提出的多步预报动态补偿控制方法,通过设计多步预报观测器,实现了星体平台姿态的实时观测;通过设计动态补偿增益,实现了扰动的动态精确补偿。解决了传统卫星前馈补偿不精确、测量时延导致的姿态扰动问题,实现了多级卫星扰动的动态精确补偿。
本文地址:https://www.jishuxx.com/zhuanli/20250110/353644.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。