一种基于车辆模型的预设时间跟踪控制方法
- 国知局
- 2025-01-10 13:41:07
本发明属于车辆跟踪安全驾驶,具体涉及一种基于车辆模型的预设时间跟踪控制方法。
背景技术:
0、技术背景
1、近年来,随着智能交通系统的快速发展,交通拥堵问题都在面临着严峻的挑战。在车辆长期驾驶循环中,与同车道的车辆保持较小的安全的车间距并跟随前车行驶,从而有效地提高交通效率,缓解交通拥堵问题。车辆的稳定性包括内部稳定性与弦稳定性。内部稳定性要求任何单个车辆与其前一车辆保持所需的距离,弦稳定性可防止车间距误差沿车队进行增加。
2、对于车辆稳定性的研究中,除了车辆跟踪稳定性之外,误差的收敛速度通常是衡量性能的另一个重要指标。针对误差收敛速度的问题,目前的研究成果确实难以获得快速收敛性能,通常只能得到渐进稳定,即时间趋于无穷时的稳定状态。而实际工业中,需要在短时间内实现误差收敛,因此,设计合理的车间距,从而保持车辆短时间内的稳定性变得尤为重要。
技术实现思路
1、本发明的目的是提供一种基于车辆模型的预设时间跟踪控制方法,在考虑跟车过程中跟随车受到的空气阻力、坡道阻力、滚动阻力的基础上,最大限度的在规定的时间内实现跟随车辆的运动状态与前车的运动状态之间整体的稳定性,也就是跟随车应当在预设时间内保持与前车一致的速度来保证安全车距行驶,同时实现后车的位置跟踪误差在预设时间内收敛到零附近的一个领域内,确保后车准确跟随前车。
2、为了达到上述目的,本发明采用的技术方案为:基于车辆模型的预设时间跟踪控制方法,包括以下步骤:
3、步骤s1:建立跟随车辆的纵向动力学模型并给出理想的跟车距离;
4、步骤s2:分析影响跟车安全的主要因素,合理设计跟随车理想跟车模型;
5、步骤s3:针对动态交通状况,设计观测器对路面工况进行观测并设计补偿控制器对跟随车进行动态调整,使其能够适应不同的路面情况和外界干扰;
6、步骤s4:在非线性车辆动力学模型的基础上,以反步法为框架,结合预设时间控制理论、杨不等式等多种不等式技术设计基于理想车距的预设时间控制器以实现对前车车辆位置与速度的跟踪。
7、步骤s5:依据车辆硬件参数,选定合适跟车工况,设计适当控制器参数,通过matlab仿真验证所发明的控制的有效性、鲁棒性和快速跟随性。
8、优选的,步骤s1的建立跟随车辆的纵向动力学模型并给出理想的跟车距离包括:
9、(1)建立跟随车辆纵向动力学模型:
10、
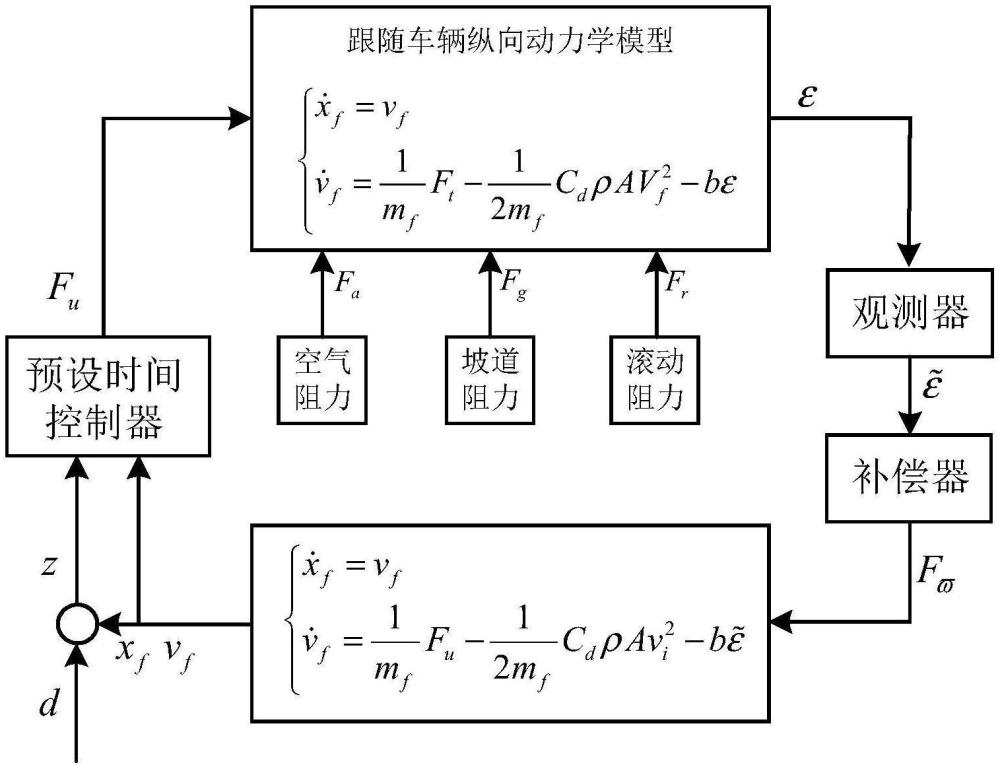
11、其中,xf、mf、vf分别表示跟随车的位置、质量与速度;ft表示车辆的牵引力,fa表示车辆行驶过程中的空气阻力,fr为车辆的滚动阻力,fg为车辆的坡道阻力;同时,空气阻力与车辆行驶的速度vf、空气的密度ρ、空气阻力系数cd和迎风面积a密切相关。跟车过程中跟随车的空气阻力、坡道阻力、滚动阻力分别表示为:
12、
13、式中,fr表示滚动阻力系数,g表示重力加速度,θ为道路的坡度。
14、因此,车辆的纵向动力学模型最终可写为:
15、
16、式中,ε=frcosθ+sinθ,b=g。路面的情况和道路的坡度用ε表示,并将其设为车辆跟踪系统的扰动项。
17、(2)理想的跟车距离:
18、假设理想的跟车距离为
19、d=xp-xf-lf (4)
20、式中,d为理想的跟车距离(在当前车速制动下不与前车相撞的最小车间距),lf为跟随车的车身长度。
21、优选的,步骤s3中针对实际的交通状况,设计观测器对路面工况进行观测并设计补偿控制器对跟随车进行动态调整,方法如下:
22、(1)构造观测器:由于路面交通情况不可测,设计相关观测器对跟随车辆纵向动力学模型中的不可测状态进行观测和估计,使其能够适应不同的路面情况和外界干扰,观测器用表示。
23、(2)构造补偿控制器获得补偿后的目标系统:补偿控制器的作用主要是对跟随车进行动态调整以克服车辆行驶时路面阻力对车辆行驶速度和牵引力的影响,从而提高车辆行驶的安全性和稳定性。
24、定义带有观测器的辅助变量:
25、
26、式中,a0>0为观测器增益,表示跟踪系统扰动项ε的估计值。
27、由于牵引力ft与预设时间控制器输出fu和克服路面阻力的补偿控制有关,因此可以表示为
28、构造补偿控制器fε,并给出观测器的估计误差结合牵引力ft、补偿控制器fε和观测器估计误差获得不可测变量观测后和补偿控制器补偿后的目标系统,即:
29、
30、优选的,在步骤s3中,在非线性车辆动力学模型的基础上,以反步法为框架,结合预设时间控制理论、杨不等式等多种不等式技术设计,基于理想车距的预设时间控制器以实现对前车车辆位置与速度的跟踪,其方法如下:
31、(1)在反步法的第一步,针对观测和补偿后的目标系统的第一个子系统给出坐标变换z1=xf-d;定义lyapunov函数并结合坐标变换对其求导;引入虚拟控制器α,定义虚拟误差变量z2=vf-α,根据lyapunov函数的一阶导函数获得虚拟控制器α的表达式。
32、(2)在反步法的第二步,针对观测和补偿后的目标系统的第二个子系统构造lyapunov函数结合虚拟误差变量z2=vf-α对lyapunov函数v2求导,构造相应的实际预设时间控制器。
33、(3)将反步法每一步中构造的控制器代入lyapunov函数验证其是否满足预设时间稳定理论若证明所设计的控制器满足预设时间稳定定理,则跟随车可在预设时间内在安全车距下保持与前车一致的速度行驶,同时实现后车的位置跟踪误差在预设时间内收敛。
34、根据以上步骤就可以实现道路上后车对前车在规定时间内的安全跟踪,且跟踪误差收敛到原点附近的小邻域内。
35、采用本技术方案的有益效果:
36、1.本发明基于车辆纵向动力学模型,结合预设时间控制理论,提出一种预设时间跟踪控制算法,保证跟踪稳定性与位置跟踪误差收敛性,即跟随车在预设时间内保持与前车一致的速度,位置跟踪误差在预设时间内收敛到零附近的一个邻域内,从而保证跟踪控制的稳定性和精度。
37、2.本发明针对实际的交通状况,设计观测器对路面工况(如跟车过程中跟随车受到的空气阻力、坡道阻力、滚动阻力等不可测环境因素)进行观测并设计补偿控制器对跟随车进行动态调整,使其能够适应不同的路面情况和外界干扰,从而提高车辆行驶的安全性和稳定性。
38、3.本发明在反步法的框架下结合预设时间稳定理论设计控制器实现在给定时间内车辆的稳定性和精准跟踪。预设时间控制相比于固定时间控制,拥有更加紧凑的收敛区间,可以在任意指定的时间范围内达到稳定,避免了稳定时间上界由于理论分析的保守型和复杂性与实际稳定时间差距过大的问题。
技术特征:1.一种基于车辆模型的预设时间跟踪控制方法,主要包括以下步骤:首先,建立跟随车辆的纵向动力学模型并给出理想的跟车距离;其次,针对实际的交通状况,设计观测器对路面工况进行观测并设计补偿控制器对跟随车进行动态调整,使其能够适应不同的路面情况和外界干扰;最后,在非线性车辆动力学模型的基础上,以反步法为框架,结合预设时间控制理论、杨不等式等多种不等式技术设计基于理想车距的预设时间控制器以实现对前车车辆位置与速度的跟踪。具体而言包括以下步骤:
2.根据权利要求1所述的一种基于车辆模型的预设时间跟踪控制方法,其特征在于,步骤s1的建立跟随车辆的纵向动力学模型并给出理想的跟车距离包括:
3.根据权利要求1所述的一种基于车辆模型的预设时间跟踪控制方法,其特征在于,步骤s3中针对实际的交通状况,设计观测器对路面工况进行观测并设计补偿控制器对跟随车进行动态调整,方法如下:
4.根据权利要求1所述的一种基于车辆模型的预设时间跟踪控制方法,其特征在于,在步骤s4中,在非线性车辆动力学模型的基础上,以反步法为框架,结合预设时间控制理论、杨不等式等多种不等式技术设计基于理想车距的预设时间控制器以实现对前车车辆位置与速度的跟踪,其方法如下:
5.根据权利要求1所述的一种基于车辆模型的预设时间跟踪控制方法,其特征在于,在步骤s5中,适当选取跟随车参数及交通路况参数,选定车辆跟随时间,通过matlab软件编程和仿真确认所获取结果的有效性。
技术总结本发明提供了一种基于车辆模型的预设时间跟踪控制方法,旨在提升车辆跟车下的响应速率,减少车辆跟随下的“幽灵车辆”问题,提升交通通行效率。本发明在考虑跟车过程中跟随车受到的空气阻力、坡道阻力、滚动阻力的基础上,将预设时间控制理论与车辆跟踪控制相结合,设计控制器实现安全车距内车辆的跟踪控制。该控制器需要满足跟踪稳定性和位置跟踪误差收敛性两个要求,即在车辆跟踪控制过程中,需要保证跟随车辆的运动状态与前车的运动状态之间存在稳定的关系,也就是跟随车应当在预设时间内保持与前车一致的速度以保证安全车距行驶,同时实现后车的位置跟踪误差在预设时间内收敛到零附近的一个领域内,确保后车准确跟随前车。技术研发人员:王楠,陶发展,王志凯,朱龙龙,付主木,王俊,王桐,冀保峰,张平,何静,张冀,孙力帆,张高远,李梦杨,张中才受保护的技术使用者:河南科技大学技术研发日:技术公布日:2025/1/6本文地址:https://www.jishuxx.com/zhuanli/20250110/354689.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表